Journal influence
Bookmark
Next issue
Abstract:
Аннотация:
| Authors: (a.mishin@ntpdubna.ru) - , Ph.D, Ulyanov, S.V. (ulyanovsv46_46@mail.ru) - Dubna State University – Institute of System Analysis and Control, Dubna, Joint Institute for Nuclear Research – Laboratory of Information Technology (Professor), Dubna, Russia, Ph.D, () - , () - , () - | |
| Ключевое слово: |
|
| Page views: 13973 |
Print version |
В настоящее время проводятся интенсивные исследования в области разработки роботов сервисного обслуживания (МРСО) с ис- пользованием идей и методов искусственного интеллекта, включая мягкие вычисления, модели пространственно-временных логик и действий, когнитивную графику и естественный язык (ЕЯ). Различаются 2 класса МРСО: (1) класс А [11,12] - роботы, предназначенные для работы в трудных и опасных условиях и полностью заменяющие человека; (2) класс В [5,14] - роботы, оперирующие с людьми с целью усилить возможности человека или облегчить ему выполнение задач [4,8]. Роботы класса А должны быть способны преодолевать или избегать препятствия на их пути, а также выполнять требуемые технологические операции. В статье рассматриваются вопросы разработки системы интеллектуального управления МРСО класса В.
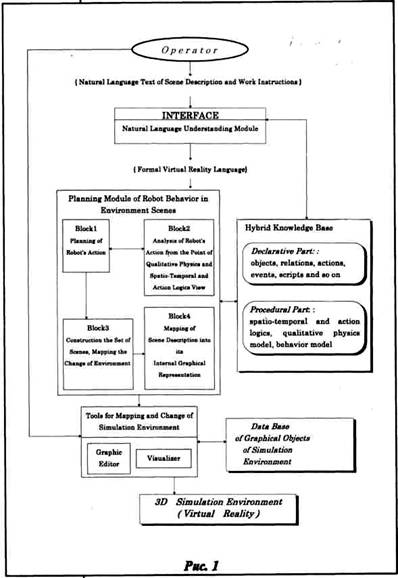
Экспериментальный прототип робота, передвигающегося с помощью двухколесной тележки, снабжен 13 ультразвуковыми и 9 инфракрасными сенсорами, а также манипулятором с пятью степенями свободы и CCD-камерой. МРСО функционирует в служебном здании со многими комнатами, этажами и лифтом и выполняет требуемые операции, в том числе и очистку помещений. МРСО отличается от индустриальных роботов следующими параметрами: мобильностью, маневренностью, уровнем интеллекта, легкостью исполнения операций, адаптивностью и портативностью. Дальнейшая проработка этой области робототехники должна быть посвящена проблемам улучшения свойств мобильности, маневренности, интеллектуальности поведения, расширению технологических способностей. В статье предлагается новый подход к разработке интеллектуальной системы управления МРСО с различными формами прямого взаимодействия, включая ЕЯ. Основу такой системы составляют подсистема моделирования поведения робота в среде с активным взаимодействием с оператором и подсистема управления автономным передвижением. В первой части статьи рассматривается система моделирования поведения МРСО на основе прямого взаимодействия с оператором, задающим описания сцен среды и инструкции на ЕЯ. Во второй части рассматривается интеллектуальная система управления автономным передвижением МРСО. Эксперименты по управлению передвижением МРСО в среде показали, что предлагаемые методы и алгоритмы эффективны для задач управления автономным движением робота и для выполнения им требуемых операций. Прямое взаимодействие "человек-робот" и система моделирования поведения мрсо Рассмотрим использование ЕЯ для описания условий искусственной жизни МРСО, моделируемой с помощью системы. Это позволит оценить алгоритмы управления поведением робота и уменьшить трудности, связанные с реальными экспериментами, в которых могут быть те или иные повреждения "hardware" МРСО. Математической основой системы моделирования поведения МРСО являются: инженерия знаний, включающая пространственно-временные логики, логики действий, модель наивной физики и связанные с ними рассуждения на уровне здравого смысла; мягкие вычисления и когнитивная графика. Обсудим понятия, структуру и концептуальную модель системы моделирования поведения МРСО. Рассмотрим схему взаимодействия "человек-робот" на основе ЕЯ. Человек-оператор дает описание на ЕЯ условий искусственной жизни МРСО, включающее: 1) описание сцен среды (например комнат в здании, объектов в них, нечетких пространственных отношений между объектами и т.д.); 2) инструкции и сценарии деятельности МРСО в среде (например пойти в комнату, перенести объект с места на место, убрать помещение). Структура системы моделирования поведения МРСО в имитационной среде (типа виртуальной реальности) показана на рисунке 1. Система состоит из следующих компонент: 1) меню-интерфейс с модулем ввода ЕЯ-текстов; 2) модуль планирования поведения МРСО, включающий следующие четыре блока: - блок 1: планирования действий робота; - блок 2: анализа действий с точки зрения качественной физики, пространственно-временных и действия логик; - блок 3: построения множества сцен, отражающих изменения в среде, связанные с действиями робота; - блок 4: отображения описаний сцен на внутреннем языке в их графические представления; 3) средства для отображения и изменения сцен среды, включающие графический редактор и визуализатор; 4) База Знаний и База графических объектов. Опишем наиболее важные компоненты системы. Меню-интерфейс задает пути доступа к основным модулям системы: "ввода ЕЯ-текста"; "вызова графического редактора", "визуализации сцен и сценариев". ЕЯ-текст поступает на вход лингвистического процессора, реализующего его трансформацию во внутреннее представление на формальном языке, называемом языком описания виртуальной реальности (ЯВР). Для обработки ЕЯ-текстов используется модификация метода Вудса расширенных сетей переходов. Далее информация на выходе из блока 4 представляется в виде множества <Х, Y, Z> координат объектов в относительной системе координат, связанной с пространственной сценой, которое затем с помощью визуализатора преобразуется в абсолютные ("физические") координаты дисплея. Выходная информация от системы моделирования используется в подсистеме автономного передвижения МРСО для глобального планирования пути, а также на этапе оценки оператором адекватности поведения робота в среде по выполнению полученной инструкции. Графический редактор используется для создания и модификации трехмерных объектов среды. При визуализации сцен мы используем основной принцип когнитивной графики: вместо сложных математических моделей объектов для описания их графических представлений используются более простые образы как результат отображения, основанный на знаниях. Для нашей задачи - изучения алгоритмов рационального поведения МРСО в трехмерных пространственных сценах и построения алгоритмов интеллектуального управления - важным является не столько наиболее реалистичное изображение объектов, сколько адекватное отображение пространственных отношений, движений и действий по выполнению технологических операций МРСО. База Знаний системы состоит из нескольких классов, отражающих синтаксические, семантические и прагматические знания об объектах, пространственных отношениях, действиях, сценариях и др. Для представления этих знаний используются фреймовый и продукционные подходы. Формальный язык для описания ПОВЕДЕНИЯ РОБОТА В ТРЕХМЕРНЫХ СЦЕНАХ Будем рассматривать следующую виртуальную среду для МРСО. Робот функционирует в сложном мире типа здания с многими комнатами и служебными помещениями, этажами, коридорами, лифтами, другими роботами. В каждой комнате имеется множество объектов в определенных пространственных отношениях. МРСО реализует в такой среде действия, связанные с перемещением, изменением пространственных отношений и др. Для моделирования такой среды и поведения МРСО разработан формальный язык - ЯВР. Таблицы 1 и 2 показывают основные понятия, синтаксис и семантику ЯВР. Проблемы разработки пространственно-временных логик и логик действия для интеллектуального принятия решений и рассуждений для МРСО Рассуждения о времени, пространстве и действиях являются важным аспектом рационального поведения интеллектуальной системы. Много работ посвящено разработке различных парадигм для рассуждений, однако наибольшие успехи достигнуты в логическом подходе к моделированию рассуждений [2,3,6] Нами разработана система правдоподобных рассуждений для моделирования рационального поведения МРСО, основанная на так называемых псевдофизических логиках (ПФЛ). Название псевдофизические объясняется тем фактом, что не только реальные физические и метрические свойства времени, пространства и действий описываются в аксиомах и правилах вывода, но и свойства их восприятия человеком. Наиболее важными аспектами этих логик являются: 1) некоторая часть рассуждений связана со шкалами; 2) существует несколько компонент логик, связанных между собой; 3) компоненты являются логиками отношений; 4) некоторые компоненты, имеющие дело с динамическими ситуациями, являются немонотонными логическими системами. Для моделирования поведения МРСО использовалась модификация ПФЛ, разработанная в [2,6]. Эксперименты показали эффективность и адекватность предложенных логик для задачи моделирования рационального поведения МРСО в трехмерных сценах. Примеры аксиом ПФЛ приведены в таблице 2- Таблица 1
Таблица 2 Пример мягких вычислений для интеллектуального управления положением МРСО в системе моделирования его поведения Рассмотрим правила мягких вычислений, связанных с определением координат объектов сцены в соответствии с нечеткими пространственными отношениями. Пространственное отношение между двумя объектами описывается как отношение между двумя базовыми точками данных объектов (в частности, это могут быть центры масс объектов; в нашем случае таковыми являются задние левые вершины оснований параллелепипедов, представляющих графический образ объектов). Расстояние L(A,B) между объектами А и В, связанными нечетким пространственным отношением R, есть функция следующих параметров: L(A,B)=F{R,L(A),L(B),L(SCENE)}, где L(A), L(B), L(SCENE) - размеры объектов А, В и сцены соответственно. Для отношений пространственной близости используется следующее правило мягких вычислении: L(A,B) = Kcloseness (L(SCENE) - L(A) -L(B)), если размеры L(A) и L(B) сопоставимы и L(A,B) = (Kcloseness + L(A)/L(B)) (L(SCENE) - L(A) - L(B)), если размеры L(A) много больше L(B). Здесь Kcloseness представляет собой значение функции принадлежности данного нечеткого отношения Я, построенной на универсальной лингвистической шкале расстояний [2]. (В нашем случае мы берем в качестве значения Kcloseness максимальное значение функции принадлежности). Правила вычислений координат базовых точек объектов для пространственных отношений направленности описаны в[1]. Пример моделирования Рассмотрим следующую задачу. С помощью прямого взаимодействия "оператор-робот" МРСО получает следующую входную информацию на ЕЯ: "Комната №217 расположена на втором этаже. Стол находится в центре комнаты, на нем лампа. Кресло стоит справа и недалеко от стола. Позади кресла стоит шкаф. Пойди в эту комнату, возьми лампу и поставь ее на шкаф." С помощью системы модотирования сцен и действий МРСО можно построить последовательность сцен, отражающих действия робота, адекватные полученной входной информации, и оценить правильность алгоритмов его поведения. Система моделирования позволяет изучать и корректировать различные алгоритмы поведения МРСО на уровне действий и навигации в среде при наличии препятствий. Если разработанные алгоритмы адекватны поставленным задачам и целям, то модули планирования, навигации, человеко-машинного взаимодействия могут быть перенесены в систему управления МРСО, функционирующем в реальной среде. Внутренние представления данных системы моделирования являются входом для системы управления второго уровня. В следующей, второй части статьи рассматриваются вопросы построения интеллектуальной системы управления МРСО второго уровня - уровня автономного перемещения в реальной среде. Рассматриваются алгоритмы управления на основе нечеткой логики, а также методы мягких вычислений (в частности генетические алгоритмы) для решения задачи открывания дверей манипулятором МРСО. Интеллектуальное управление МРСО В реальной среде функционирования МРСО возникает потребность в согласованном (кооперативном) управлении всеми его подсистемами, включая моделирование, навигацию, манипулирование с объектами и взаимодействие с оператором или другими роботами. Управляющая система кооперативного типа должна обладать определенными способностями: 1) понимать команды оператора (в том числе и на ЕЯ), а также данные и процедуры своих подсистем; 2) управлять подсистемами в соответствии с заданной командой; 3) управлять одной подсистемой в соответствии с другой; 4) объявлять свои намерения оператору или другим роботам.
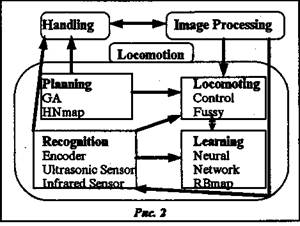
Способности 3) и 4) реализуют функцию автономного контроля за подсистемами, а все четыре способности конструируются как фундаментальная управляющая система МРСО (аналог мозга робота). Рассмотрим проблемы построения интеллектуальной системы управления автономным движением МРСО, структура которой показана на рисунке 2.
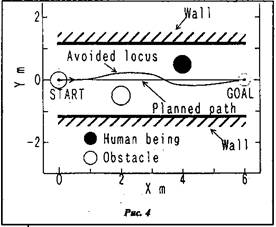
В работах [5,9,13] предложен алгоритм планирования эффективного и корректного пути с использованием распределенного генетического алгоритма DGA (Distributed Genetic Algorithm) и иерархической карты локов HNM (Hierarchical Node Map). В системе контроля автономным движением используется полученный предложенным методом маршрут и иерархическая карта локов, построенная для среды перемещения (в нашем случае - это двухмерный план этажа здания с комнатами и коридорами, изображенный на рисунке 3). Начальное и целевое положения МРСО фиксируются в некоторых локах HNM. Например, переместиться из комнаты № 13, лок 26, в лифт (лок 34). Используя процедуру построения маршрута, создается рабочий план перемещения из точки 26 в точку 34 с учетом технологической операции открытия двери и выхода из комнаты. В процессе движения МРСО необходимо избегать препятствия, находящиеся на его пути. Для распознавания местоположения МРСО и препятствий используется информация от сенсоров. 13 ультразвуковых и 9 инфракрасных сенсоров позволяют быстро определить наличие объектов спереди и сбоку движения МРСО, причем благодаря наличию инфракрасных сенсоров одушевленные препятствия (люди) избегаются более аккуратно, нежели обычные предметы. Для управления процессом перемещения и обхода препятствий используется метод нечеткого управления со следующими входными параметрами: расстояние между спланированным маршрутом и роботом; расстояние между целью и роботом; угол между целью и роботом. В качестве выхода нечеткого вывода используются следующие параметры: угол руля; скорость движения; безопасность движения. Разработано множество управляющих правил для принятия решений по управлению движением МРСО. Выходное управление получается в процессе дефазификации управляющего правила с помощью метода весов. На основе предложенного метода управления проведены эксперименты в реальной ситуации, которые показали его эффективность. На рисунке 4 показано достижение роботом цели с обходом препятствий в реальном окружении (при движении его по коридору здания). Интеллектуальный МРСО должен передвигаться автономно из одной комнаты в другую на различных этажах с использованием лифта. Роботу часто прийдется выполнять операцию открытия/закрытия дверей комнат. Сложные процессы открытия двери, на наш взгляд, аналогичны эволюционному вычислению (evolutionary computing) и требуют новых интеллектуальных стратегических операций для манипулятора МРСО. Успешное выполнение этой эволюционной операции зависит от выбора начальной позиции МРСО и движения манипулятора по спланированной траектории. Для гибкой реализации этой эволюционной
операции необходимо разработать эффективные и интеллектуальные вычислительные алгоритмы для следующих двух задач: (1) определение начальной позиции МРСО перед ручкой двери подобно парковке автомобиля; (2) планирование траектории движения манипулятора для открытия двери. Мы предлагаем новый метод для реализации этих алгоритмов. Для первой задачи - это алгоритм на основе так называемой системы нечетного классификатора FCS (Fuzzy Classifier System), представляющей собой разновидность генетического алгоритма GA (Genetic Algorithm). Операция позиционирования (определение начальной позиции робота перед дверью) может быть описана с использованием нечетких продукционных правил, и система управления МРСО может корректировать положение робота, используя ультразвуковые датчики или изображение. Однако число нечетких правил при большом числе входов становится также очень большим, в результате появляется сложность даже для эксперта-человека создания таблицы просмотра нечетких продукционных правил. Поэтому мы предложили использовать алгоритм мягких вычислений в виде FCS, применив систему классификатора к нечетким продукционным правилам. Алгоритм FCS на основе GA показан на рисунке 5. С помощью мягких вычислений на FCS могут быть представлены гибкие процессы обучения без стереотипов-примеров. Для второй задачи разработан метод построения траектории манипулятора на основе генетического алгоритма в непрерывном пространстве (Genetic Algorithm in Continious Space). С помощью этих алгоритмов МРСО успешно выполняет операцию открытия двери [7]. Эксперименты показали эффективность предложенных алгоритмов и методов интеллектуального управления. Подводя итоги, отметим, что мы обсудили основные идеи, структуру и экспериментальные результаты по управлению перемещением и выполнением ряда технологических операций мобильного робота сервисного обслуживания. Мы также рассмотрели метод моделирования поведения робота в рабочей среде с целью исследования алгоритмов его действий. В дальнейшем планируется активно использовать блок адаптации, который поможет МРСО обучаться новым действиям и сценариям на основе мягких вычислений, включая использование нечетких нейронных сетей, нечеткого управления и генетических алгоритмов. Часть работы, связанная с прямым взаимодействием "человек-робот" и системой моделирования поведения МРСО (Литвинцева Л.В., Ульянов СВ.) частично поддерживалась Российским Фондом Фундаментальных Исследований по гранту № 95-01-00729а. Авторы выражают огромную благодарность за поддержку научных исследований. Список литературы 1. Байдун В.В., Литвинцева Л .В., Налитов С.Д. Методы искусственного интеллекта в задаче визуализации трехмерных пространственных сцен // Известия РАН. - Техническая кибернетика.-1994. -№5. -С.103-111. 2. Кандрашина Е.Ю., Литвинцева Л.В., Поспелов Д.А. Представление знаний о времени и пространстве в интеллектуальных системах .- М.: Наука, 1989. 3. Ульянов СВ., Литвинцева Л.В. Псевдофизические логики для интеллектуальных систем принятия решений: пространственно-временные модели. // Сб.ИФТП РАН. -1993.-С.92-118. . 4. Asami S. Robotics in Japan: present and future (The new generation of service robot), IEEE Robotics & Automation Magazine, 1, 2, 22-26,1994. 5. Ishikawa A., Miyagava W., Tanaka T. and Yamafuji K. Development of intelligent mobile robot for service use (2nd report), Japan Soc. Mech. Engineers Ann. Conference on Robotics and Mechatronics, Kobe, A, 353-358,1994. 6.Litvintseva L.V. Visualization of three-dimentional scenes based on textual descriptions for intelligent systems, Computer & Systems Sciences Intern., 31,1,98-105,1993. 7. Ohwi J., Ulyanov S.V.and Yamafuji K. GA in continuous space and fuzzy classifier system for opening of door with manipulator of mobile robot: new benchmark of evolutionary intelligent computing, IEEE Int. Conf. Evolutional Computing , Perth, 1, 257-261, 1995. 8. Pellerin С Service robots in the 1990's, Industry Robotics, 20, 3,34-35, 1993. 9. Tanaka Т., Yamafuji K., Miyagawa K., Watanabe H.,Takahashi H. and Ulyanov S.V. Intelligent locomotion controlsystem of the mobile robotfor service use, 2nd Int. conf.Mechatronics & Machine Vision, Hong Kong, 107-112, 1995. 10. Ulyanov S.V., Lityintseva L.V., Takanashi Sh. andYamafuji K. Cognitive graphics and virtual reality for directhuman-robot communication in mobile robot for service use, 6th Int. Sump. Micro Machine & Human Science, Nagoya, Japan, 241-246, 1995. 11. Ulyanov S.V., Yamafuji K.,Gradetsky V.G. andFukuda T. Development of intelligent mobile robot for serviceuse mobile automation system including wall climbing robots:Pt.1 .Fundumental design principles and motion models, Int. J.Intelligent Mechatronics, 1,3,11-143,1995. 12. Ulyanov S.V., Yamafuji K.,Gradetsky V.G. and Pagni A. Expert fuzzy-neuro controller design for wall climbing robot for decontamination of nuclear-power station, J.Robotics & Mechatronics, 7,1 ,75-85,1995. 13. Ulyanov S.V., Yamafuji K., Wiyagawa K., Tanaka T. and Fukuda T. Intelligent fuzzy motion control of mobile robot •for service use, IEEE/RSJ Int. Conf. Intelligent Robots & Systems (IROS'95), Pittsburg, 3, 486-491,1995. 14. Yamafuji K.,Yamazaki Y., Watanabe Т., Ogino K., Hamuro M. and Saeki K. Development of intelligent mobile robot for service use, Japan Soc. Mech. Engineers Ann. Conference on Robotics and Mechatronics, Kawasaki, B, 269-270,1992. |

| Permanent link: http://swsys.ru/index.php?page=article&id=1083&lang=en |
Print version |
| The article was published in issue no. № 3, 1996 |
Perhaps, you might be interested in the following articles of similar topics:
- Компьютерная интеграция и интеллектуализация производств на основе их унифицированных моделей
- Основные характеристики методики АДЕСА-2 для разработки информационных систем и возможности ее практического применения
- Зарубежные базы данных по программным средствам вычислительной техники
- Формирование программ развития больших систем административно-организационного управления
- Алгоритмы и программное обеспечение системы обработки топопланов
Back to the list of articles