Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Оптимизация размещения средств траекторных измерений генетическими алгоритмами
Аннотация:Описан подход к оптимальному размещению средств траекторных измерений с применением генетических алго-ритмов. Предложенный подход иллюстрируется результатами математического моделирования.
Abstract:The approach to optimum placing of trajectory measurements means with application of genetic algorithms is described. The offered approach is illustrated by means of results of mathematical modeling.
| Авторы: Ковалев А.А. (kaaswsys@mail.ru) - НПК «ТРИСТАН», г. Москва, кандидат технических наук | |
| Ключевые слова: геодезические координаты, вектор состояния, генетический алгоритм, траекторные измерения, оптимизация |
|
| Keywords: geodetic coordinates, state vector, generic algorithm, trajectory measurements, optimisation |
|
| Количество просмотров: 11920 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
Задача оптимального размещения средств траекторных измерений формально сводится к минимизации (или максимизации) целевой функции, характеризующей эффективность совместной обработки данных. При этом в общем случае с каждым из средств траекторных измерений может быть связана пространственно-временная функция В качестве Связывая с каждым i-средством соответствующую функцию локальной пространствен- но-временной эффективности средств Полученная локальная пространственно-временная эффективность совместной обработки Таким образом, при имеющейся математической модели
Сложность задачи обусловлена как ее многомерностью, так и пространственно-временной динамикой эффективности алгоритмов совместной обработки (например, фильтрации Стратоновича–Калмана). Таким образом, решение задачи подразумевает использование методов численной оптимизации, результат которых может зависеть от выбора начальных приближений. Применение генетических алгоритмов [1] позволяет избежать этап выбора начальных приближений и обеспечивает получение глобального максимума эффективности. Формально установим соответствие между категориями генетических алгоритмов и категориями средств траекторных измерений: - ген – двоичный бит; - хромосома – набор из m битов, реализующих двоичную кодировку вещественного десятичного числа; хромосоме k соответствует координата j средства i (k=j+i(M-1), где M – число координат средств); - особь (индивид) – набор из N´M хромосом (всех из M координат всех из N средств); - поколение – набор из 10–20 особей; - фитнес-функция (fitness function) – Предложенный подход проиллюстрируем на примере размещения двух однотипных радиолокационных станций (РЛС) для обеспечения точности оценки координат, не хуже заданной, вдоль заданной трассы полета цели. Для определенности полагаем, что цель совершает полет с постоянной скоростью на постоянной высоте по прямой. Введем локальный пространственно-временной показатель эффективности обработки:
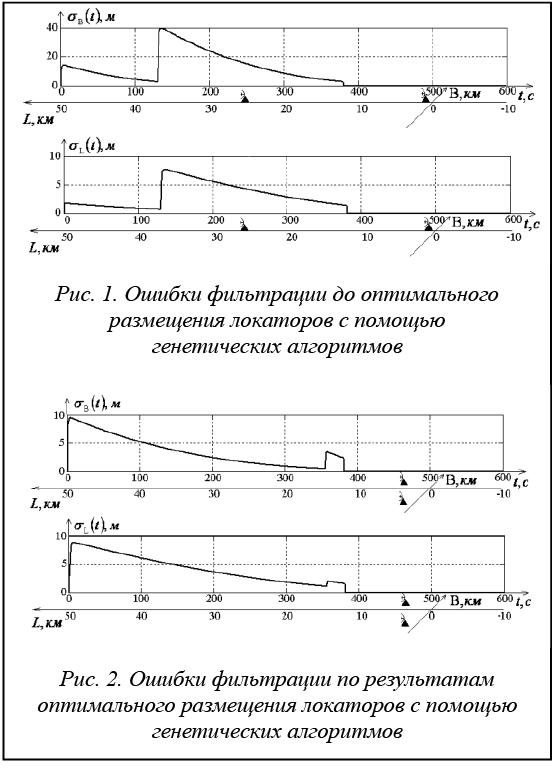
где представлены СКО оценок геодезических: широты цели – sB(t), долготы цели – sL(t), высоты цели – sh(t). В качестве вектора состояния цели принимаем набор ее геодезических координат, скоростей и ускорений, а векторов наблюдения – векторы вида (Ri bi ei)T (дальность, азимут и угол места цели). Обобщенным целевым функционалом будет
где
Таким образом, требуя
по сути требуем максимальной протяженности той части трассы цели, в пределах которой ошибки оценки широты и долготы цели оказываются не выше заданных.
Результаты совместной обработки (фильтрации Стратоновича–Калмана) [2] в виде ошибок оценки широты и долготы цели в метрах при размещении РЛС без использования генетических алгоритмов показаны на рисунке 1. После привлечения генетических алгоритмов для поиска такого местоположения РЛС, при котором реализуется максимальная часть трассы с ошибками оценивания широты и долготы не хуже 10 м, получены результаты фильтрации, приведенные на рисунке 2. При сравнении рисунков обнаруживается, что удалось увеличить часть трассы, в пределах которой реализованы ошибки не выше требуемых, а сходимость генетического алгоритма гарантирует глобальность полученного максимума. Таким образом, на примере оптимального размещения двух РЛС показана эффективность использования генетических алгоритмов для оптимального размещения средств траекторных измерений. Литература 1. Андрейчиков А.В., Андрейчикова О.Н. Интеллектуальные информационные системы. М.: Финансы и статистика, 2004. 424 с. 2. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416 с. |
 , характеризующая локальную эффективность средства, где
, характеризующая локальную эффективность средства, где  – вектор координат средства, t – время.
– вектор координат средства, t – время. , можно построить (вычислить) и локальную пространственно-временную эффективность сов- местной обработки
, можно построить (вычислить) и локальную пространственно-временную эффективность сов- местной обработки  , где
, где  – пространственные координаты i-средства,
– пространственные координаты i-средства,  – вектор СКО оценок компонент вектора состояния цели.
– вектор СКО оценок компонент вектора состояния цели. позволяет построить и собственно целевой функционал
позволяет построить и собственно целевой функционал  . В качестве заданного ограничения-равенства при таком рассмотрении выступает траектория цели, под которую осуществляется размещение средств траекторных измерений.
. В качестве заданного ограничения-равенства при таком рассмотрении выступает траектория цели, под которую осуществляется размещение средств траекторных измерений. средств траекторных измерений и связанным с ней целевым функционалом
средств траекторных измерений и связанным с ней целевым функционалом  средств траекторных измерений, при которых достигается наилучшее значение целевого функционала
средств траекторных измерений, при которых достигается наилучшее значение целевого функционала 
 при заданных ограничениях, в общем случае при ограничениях-равенствах и ограничениях-неравенствах.
при заданных ограничениях, в общем случае при ограничениях-равенствах и ограничениях-неравенствах. .
. ,
, ,
,
 – характеристическая функция; s(t) – текущая протяженность трассы цели, отсчитываемая от момента t1 до момента t2.
– характеристическая функция; s(t) – текущая протяженность трассы цели, отсчитываемая от момента t1 до момента t2.
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=2914 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
| Статья опубликована в выпуске журнала № 4 за 2011 год. [ на стр. 64 – 66 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Исследование эффективности самоконфигурируемого генетического алгоритма выбора эффективного варианта системы управления космическими аппаратами
- Управляемые статистические генетические алгоритмы
- Оценка эффективности методов решения задач обеспечения устойчивости функционирования распределенных информационных систем
- Генетический алгоритм выбора доминантных признаков для нейронной сети
- Репрезентативность метрик на основе событий процессора Intel Sandy Bridge при анализе времени обработки данных в памяти
Назад, к списку статей