Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Методика моделирования процесса обнаружения воздушных объектов наземной обзорной радиолокационной станцией в условиях воздействия активных шумовых помех
Аннотация:Приведены основные положения методики моделирования процесса обнаружения воздушных объектов наземной обзорной радиолокационной станцией (РЛС) в условиях воздействия активных шумовых помех для реализации этого процесса в компьютерной тренажерной системе для подготовки личного состава боевых расчетов подразделений радиотехнических войск. Анализ состояния и перспектив развития средств воздушно-космического нападения и тактики их применения показывает, что одним из способов преодоления системы ПВО является интенсивное применение радиопомех. На вооружении находятся и постоянно развиваются специальные средства радиоэлектронной борьбы, позволяющие обеспечить постановку как активных, так и пассивных помех. При моделировании процесса радиолокационного обнаружения воздушных объектов наземной обзорной РЛС необходимо учитывать возможность выполнения боевой задачи этой РЛС в сложной помеховой обстановке, адекватно учитывать в модели особенности возникновения и воздействия помех на РЛС. Известны работы, в которых представлены подходы к построению моделей активных шумовых помех, однако эти подходы не реализуемы в модели наземной РЛС, работающей в реальном масштабе времени в быстроменяющейся сложной целевой и помеховой обстановке. Целью статьи является обоснование достаточно адекватного и в то же время легко реализуемого в реальном масштабе времени способа моделирования процесса воздействия помех на наземную РЛС. Представлены формульные соотношения для расчета факта обнаружения и дальности обнаруженных целей в условиях отсутствия помех и в условиях воздействия на РЛС активных шумовых помех.
Abstract:The article considers the conceptual issues of the air objects discovery process modeling methodology by ground surveillance radar in conditions of active noise interference. The aim is to implement this process in a computer train-ing system for combat units staff of radio-radar troops. The analysis of the status and prospects of air and space attacks and used tactics shows that one of the ways to overcome the air defense system is intensive using of radio interference. The spe-cific tools of electronic warfare are in the inventory and using constantly. These tools allow making both active and passive noise. While simulating the radar detection process of air objects by ground surveillance radar it is important to consider the possibility of the task performances in a complex jamming environment, to take into account the noise creation features and radar interference attack. There are papers showing the approaches to the construction of active noise interference models. However, these approaches are impossible to implement in the ground radar model, operating in real time in a complex fluid target and jamming environment. The purpose of the article is to prove the rational and easy to implement in real-time meth-od of modeling the process of ground radar noise interference. The article represents the formulas correlations for calculation the fact of target detection and detection range in the conditions of noninterference and active radar jamming. The article contains illustrations modeled ground radar active noise interference on one of the Air Force radar using the method described in the article.
| Авторы: Бондарев С.К. (an_ta_vi@mail.ru) - НИИ «Центрпрограммсистем» (зам. зав. отделом), г. Тверь, Россия, Датнова Л.В. (an_ta_vi@mail.ru) - НИИ «Центрпрограммсистем» (зав. группой), г. Тверь, Россия, Куликов В.Н. (an_ta_vi@mail.ru) - НИИ «Центрпрограммсистем» (доцент, зав. отделом ), г. Тверь, Россия, кандидат технических наук, Смолкин М.А. () - Военно-космическая академия им. А.Ф. Можайского (соискатель), Ярославль | |
| Ключевые слова: коэффициент сжатия зоны обнаружения., активные шумовые помехи, радиолокационное обна-ружение, радиолокационные станции, тренажные системы, моделирование |
|
| Keywords: compression ratio of detection zone, active noise interference, radar detection set, radar, training systems, modeling |
|
| Количество просмотров: 19159 |
Версия для печати Выпуск в формате PDF (7.68Мб) Скачать обложку в формате PDF (1.35Мб) |
При разработке тренажных систем для подготовки личного состава боевых расчетов подразделений радиотехнических войск (РТВ) ВВС необходимо моделировать процесс радиолокационного обнаружения воздушных объектов. В то же время анализ состояния и перспектив развития средств воздушно-космического нападения и тактики их применения показывает, что одним из способов преодоления системы ПВО по-прежнему остается интенсивное применение радиопомех и ложных целей. Находящиеся на вооружении и постоянно развивающиеся специальные средства радиоэлектронной борьбы позволяют обеспечить постановку как активных (источники первичного излучения), так и пассивных (за счет использования источников переотражения электромагнитной энергии самой радиолокационной станции (РЛС)) помех [1]. Суммарная плотность мощности активных шумовых помех (АШП) прогнозируется от 120–150 Вт/МГц до 5 000 Вт/МГц для наземных обзорных РЛС боевого режима средних и больших высот и от 150–300 Вт/МГц до 500 Вт/МГц для наземных обзорных РЛС малых высот. В соответствии с этим при моделировании процесса радиолокационного обнаружения воздушного объекта наземной обзорной РЛС необходимо учитывать возможность выполнения боевой задачи данной РЛС в сложной помеховой обстановке, адекватно учитывать в модели особенности возникновения и воздействия помех на РЛС. Вопросам разработки моделей АШП посвящен ряд известных научных работ, например [2, 3]. Однако их использование в моделях наземных РЛС, работающих в реальном масштабе времени в быстроменяющейся сложной целевой и помеховой обстановке, приводит к перегрузкам вычислительных средств, на которых эти модели реализованы. Обнаружение воздушных объектов в беспомеховых условиях Информация о зоне обнаружения эталонной цели для каждого режима работы каждой РЛС должна находиться в БД в виде зависимости дальности обнаружения с вероятностью 0,5 от угла места (D1(e)). Геометрическая дальность действия РЛС (дальность радиогоризонта, км) рассчитывается по формуле
где НА – высота фазового центра антенны РЛС, м; НЦ – высота полета цели, м. Пусть DТ(ε) – текущая наклонная дальность от РЛС до воздушного объекта при условии, что ее угол места равен ε. При этом ε рассчитывается по выражению Дальнейшие расчеты осуществляются только при условии, что DТ(ε)≤DРГ и ε≤εmax (εmax – максимальный угол места). Дальность обнаружения РЛС произвольной цели с вероятностью 0,5 должна определяться следующим образом: Признаком обнаружения цели является наличие отметки от цели – координатной точки или аналоговой дужки. Эта первичная радиолокационная информация (РЛИ) по рассматриваемой цели отображается на экране рабочего места обучающегося при выполнении условия (DТ(ε)≤DРГ∙КРГ)&(ξ≤р), где КРГ – коэффициент использования радиогоризонта рассматриваемой РЛС (находится в пределах от 0,6 до 0,9); р – текущая вероятность обнаружения цели, определяемая из выражения
Обнаружение воздушного объекта в условиях АШП Воздействие АШП эквивалентно возрастанию внутреннего шума приемника РЛС (при его достаточно большом динамическом диапазоне) [1]. По этой причине в условиях АШП дальность обнаружения цели под выбранным углом места Dп(ε) уменьшается по сравнению с D0(ε). Для расчета Dп(ε) (а тем самым и установления факта обнаружения цели на ее текущей дальности) удобно использовать такой показатель, как коэффициент сжатия зоны обнаружения, который численно равен отношению наклонной дальности обнаружения цели с заданной эффективной площадью рассеяния в помехах к дальности обнаружения этой же цели в условиях без помех: К(β, e)=Dп(β, e)/D0 (e). Рассмотрим подход к расчету К(β, e). Согласно [5],
где Рш – мощность собственных шумов приемника (Вт); β, ε – азимут и угол места цели соответственно; Рп(β, ε) – мощность помехи на выходе устройства помехозащиты РЛС (Вт) в угловом направлении. Необходимо заметить, что постановщик активных помех (ПАП) способен воздействовать на РЛС при выполнении следующих условий: – дальность до ПАП от РЛС не превышает дальности радиогоризонта (формула (1) при значении дальности до цели, равной дальности до ПАП); – спектральная полоса помехи должна пересекаться с полосой пропускания приемника РЛС; – угол места ПАП находится в пределах угломестной зоны РЛС (от εmin до εmax). Также можно отметить, что расчет коэффициента К(β, ε) целесообразно производить лишь в том случае, если величина Значение мощности собственных шумов приемника Рш определяется из соотношения Рш=k×То×Кш×Δfпр, (2) где k.=1,37×10-23 Дж/0К – постоянная Больцмана; То – температура по шкале Кельвина (для расчетов примем То=293 oК); Кш – коэффициент шума приемного устройства РЛС (раз); Δfпр – ширина полосы пропускания приемного устройства РЛС (Гц). Мощность помехи на выходе устройства помехозащиты РЛС определяется [1] выражением
где N – количество ПАП, воздействующих на РЛС; Dпi, Рпi, Gпi, Δfпi, βi, εi – соответственно дальность, мощность передатчика помех, коэффициент усиления передающей антенны, ширина полосы постановки помех, азимут, угол места i-го ПАП; βц, εц – азимут и угол места прикрываемой ПАП цели; Аэфф – эффективная площадь приемной антенны РЛС; Gэкв – эквивалентный коэффициент усиления приемной антенны РЛС (коэффициент направленного действия); F2(βц–βi, eц–ei) – отношение (раз) уровня диаграммы направленности приемной антенны (ДНА) РЛС в направлении βц–βi, eц–ei к максимуму ДНА (квадрат соответствует случаю, когда ДНА передающей и приемной антенн совпадают, например, в случае использования одной антенны и на прием, и на передачу); Кшп – коэффициент (безразмерный), учитывающий возможное снижение эффективности воздействия АШП на РЛС (в смысле снижения ею дальности обнаружения) за счет использования модуляции помехи (для прямошумовой помехи Кшп=1); γп – коэффициент, учитывающий несовпадение поляризации помехи и приемной антенны РЛС (безразмерный); Lпр – коэффициент потерь в приемном тракте РЛС (раз); nN – коэффициент подавления помех в приемном тракте РЛС при воздействии помех с N ПАП (раз). В выражениях (2) и (3) почти все величины при обеспечении достаточной степени точности и достоверности получаемых оценок могут быть приняты константами, определяемыми формулярными тактико-техническими характеристиками РЛС и параметрами ПАП в текущий момент времени. Исключение составляет уровень ДНА РЛС в направлении βц–βi, eц–ei. Изложим суть подхода к определению этого параметра. Как известно, ДНА РЛС имеет многолепестковую структуру как по азимуту, так и по углу места [6]. Количество, угловые величины и уровни лепестков ДНА обусловлены в основном параметрами антенн, зондирующих сигналов РЛС и влиянием земной поверхности в ближней зоне. ПАП обычно имеют слабонаправленную антенну, используемую для постановки АШП [7]. По этой причине при учете воздействия на РЛС ПАП целесообразно перейти от реальной ДНА к так называемой аппроксимированной. При этом для реальной ДНА достаточно выделить три области: 0–Δβгл – область главного лепестка в азимутальной плоскости (0–Δεгл – в угломестной плоскости); Δβгл–Δβбл (Δεгл–Δεбл) – область ближних (1–3-й) боковых лепестков; Δβбл–180˚ (Δεбл–90˚) – область фона. Дальнейшие рассуждения относятся к азимутальному случаю. Угломестный случай полностью аналогичен ему. Область главного лепестка ДНА достаточно хорошо аппроксимируется [1] показательной функцией, аргументом которой является квадрат отношения βц–βi к ширине главного лепестка по уровню половинной мощности β0,5Р (по уровню 3 дБ), и эта аппроксимация определяется выражением Значение константы g определяется уровнем (максимумом) 1-го бокового лепестка F1бл отно- сительно уровня (максимума) основного: g=10∙|lg(F1бл/2)|. Значение границы области главного лепестка ДНА β1 определяется из соображений непрерывности аппроксимированной ДНА. Область ближних боковых лепестков предлагается аппроксимировать квадратичной зависимостью в соответствии с выражением
при β1≤(βц–βi)≤β2. Значение границы области первых боковых лепестков ДНА β2, как и β1, определяется из соображений непрерывности аппроксимированной ДНА. Уровень фона Fф можно считать постоянным, то есть область фона можно задать прямой согласно выражению F(βц–βi)=Fф. (6) Значение β1 определяется из уравнения
Из этого выражения получается
Значение β2 определяется из уравнения
Из этого выражения получается
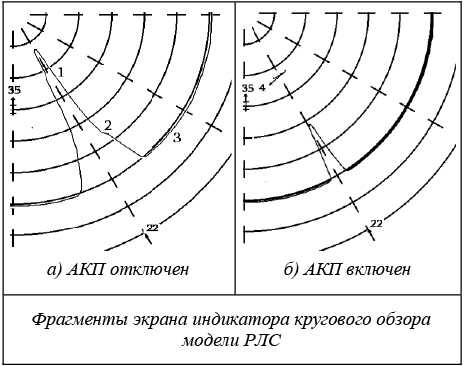
Пользуясь выражениями (4)–(6), можно рассчитать аппроксимированную ДНА в угловом направлении (βц–βi) по азимуту (в направлении (eц–ei) по углу места). На рисунке представлены фрагменты экрана индикатора кругового обзора модели одной из РЛС радиотехнических войск ВВС при моделировании воздействия на нее АШП по изложенной выше методике.
На периферии экрана отображается координатная точка ПАП (№ 22), которая характеризует угловое направление (азимутальный пеленг) воздействия АШП. В направлении на ПАП на рисунке наблюдается характерный при воздействии АШП на реальную РЛС провал. Обе части рисунка отображают одинаковую тактическую ситуацию. Рисунок (а) иллюстрирует случай, когда автокомпенсатор (средство защиты от АШП) отключен (коэффициент nN в формуле (3) равен 1), рисунок (б) – когда автокомпенсатор включен (nN=1/200 или –23 дБ). В первом случае воздействие ПАП приводит к необнаружению одного из воздушных объектов (№ 4). Во втором случае этот воздушный объект обнаружен. Рисунок, а также многочисленные эксперименты, проведенные в том числе в ходе предварительных и государственных испытаний тренажной системы, показывают высокую степень соответствия (адекватности) моделируемой РЛС ее реальному прототипу. Таким образом, представленная методика позволяет достаточно адекватно в реальном масштабе времени моделировать процесс воздействия на наземную РЛС АШП в быстроменяющейся сложной целевой и помеховой обстановке. Направлениями дальнейшего совершенствования моделирования процесса воздействия на наземную РЛС АШП могут являться учет характера модуляции АШП и более точная аппроксимация ДНА РЛС (в частности, учет заднего лепестка). Литература 1. Бердышев В.П., Куликов В.Н. и др. Системотехнические основы построения вооружения радиотехнических войск. Тверь: Изд-во Воен. акад. ВКО, 2008. Ч. 1. 2. Кошелев В.И., Штрунова Е.С. Повышение эффективности алгоритмов защиты РЛС от активных шумовых помех // Вестн. Рязанского гос. радиотехнич. ун-та. 2011. № 3. Вып. 37. 3. Тетеруков А.Г. Обоснование требований к уровню боковых лепестков ДН антенны для защиты РЛС от активных шумовых помех // Радиотехника. 2008. № 2. 4. Кузьмин С.З. Цифровая радиолокация. Киев: КВiЦ, 2000. 5. Основы построения РЛС; [под ред. проф. В.П. Бердышева]. Тверь: Изд-во Воен. ун-та ПВО, 2003. Ч. 1. 6. Афанасенков Ю.М., Шитиков А.М. Калибровка фазированных антенных решеток в условиях помех // Радиотехника. 2010. № 4. 7. Радиоэлектронные системы. Основы построения и теория; [под ред. Я.Д. Ширмана]. М.: Радиотехника, 2007. |
 , (1)
, (1) , где RЗЭ – эквивалентный радиус Земли, RЗЭ=8 500 км.
, где RЗЭ – эквивалентный радиус Земли, RЗЭ=8 500 км. , где D1(ε) – дальность обнаружения с вероятностью обнаружения 0,5 эталонной цели на угле места ε, под которым находится воздушный объект относительно линии горизонта рассматриваемой РЛС (берется из БД, где хранится информация о зоне ее обнаружения); sц – эффективная площадь рассеяния цели, м2; sэт – эффективная площадь рас- сеяния эталонной цели, м2 (обычно sэт=1 м2).
, где D1(ε) – дальность обнаружения с вероятностью обнаружения 0,5 эталонной цели на угле места ε, под которым находится воздушный объект относительно линии горизонта рассматриваемой РЛС (берется из БД, где хранится информация о зоне ее обнаружения); sц – эффективная площадь рассеяния цели, м2; sэт – эффективная площадь рас- сеяния эталонной цели, м2 (обычно sэт=1 м2). ; ξ – псевдослучайное число, равномерно распределенное на интервале [0, 1], определяемое с помощью датчика случайных чисел (RND) [4].
; ξ – псевдослучайное число, равномерно распределенное на интервале [0, 1], определяемое с помощью датчика случайных чисел (RND) [4]. ,
, не превышает формулярного значения динамического диапазона приемного устройства РЛС. В противном случае К(β, ε)=0.
не превышает формулярного значения динамического диапазона приемного устройства РЛС. В противном случае К(β, ε)=0. (3)
(3) при (βц–βi)≤β1. (4)
при (βц–βi)≤β1. (4) (5)
(5) .
. .
. .
. .
.
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=3464 |
Версия для печати Выпуск в формате PDF (7.68Мб) Скачать обложку в формате PDF (1.35Мб) |
| Статья опубликована в выпуске журнала № 2 за 2013 год. [ на стр. 70-74 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Методика моделирования процесса обнаружения воздушных объектов наземной обзорной РЛС в условиях воздействия пассивных помех
- Программный комплекс планирования производства на малом предприятии
- Программный комплекс обнаружения аномалий формы рельсовых путей
- Моделирование информационных процессов систем управления большими данными для решения задач кибербезопасности
- Моделирование систем массового обслуживания с абсолютным приоритетом
Назад, к списку статей