Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Подход к моделированию процесса оптимизации параметров эллиптических орбит спутниковой системы
Аннотация:В работе предложен подход к моделированию эллиптических орбит спутниковой системы непрерывного обзора поверхности Земли для оптимизации их параметров. С этой целью анализируются варианты решения задачи оптимизации такого обзора спутниковой системой с орбитами эллиптического типа, описываются условия, характеризующие модель движения данной спутниковой системы. Рассматривается кеплеровская модель движения спутника в декартовой (гринвичской) системе координат с началом в центре Земли. При этом для нахождения истинной аномалии используется алгоритм, включающий решение уравнения Кеплера методом последовательных приближений. Дается обоснование критерия оптимальности параметроворбит спутников, системы ограничений оптимизационной задачи. Определяются геоцентрический угловой радиус, изменяющийся с течением времени при полете искусственного спутника Земли от своего перигея к апогею, и угол обзора спутника. Выбрана критериальная функция, пред-ставляющая собой геоцентрическое угловое расстояние между радиус-векторами спутников и текущей точкой земной поверхности в текущий момент времени. Обоснован выбор параметров оптимизации. Учитывая то, что система состоит из групп спутников, движущихся по одной орбите, размерность задачи может быть существенно снижена. Сформулирована в явном виде оптимизационная задача. Проведено моделирование движения спутников в исследуемой спутниковой системе с использованием среды программирования MathCAD2014. В качестве примера на фоне карты Земли построены траектории движения подспутниковых точек трех искусственных спутников Земли с характеристиками, соответствующими характеристикам известной спутниковой системы. Получены зависимости изменения геоцентрической широты и долготы подспутниковых точек от времени, а также визуализировано их движение.
Abstract:This paper proposes an approach to modeling elliptical orbits of the Earth's surface continuous review satellite system to optimize their parameters. For this purpose the author suggests an analysis of options for solving the problemof optimization of such review by a satellite system with elliptic orbits. There are descriptions of the conditions that characterize the motion model of a considered satellite system. The author considers Kepler model of satellite motion in Cartesian (Greenwich) coordinate system with the origin at the center of the Earth. To find the true anomaly the author uses an algorithm that includes a solution of Kepler's equation using a methodof suc-cessive approximations. The paper shows justifying of parameters optimality criterion for satellites orbits, the system of op-timization problem constraints. The author determins geocentric angular radius which changes over time when Earth artificial satellite goes from its perigee to apogee, as well as a satellite viewing angle. The author has selected a criterion function which is a geocentric angular distance between the radius vectors of the satellites and the current point on the Earth's surface at the current time. The choice of optimization parameters is proven. Taking into account the condition thatthe system con-sists of satellites groups and satellites in each group are moving along the same orbit, the problem dimension can be reduced. An optimization problem is stated clearly. The paper shows a satellites motion simulation in the satellite system under re-search using MathCAD2014 environment. As an example, the paper shows the trajectories of the sub-satellite points for three artificial satellites on the Earth map with characteristics corresponding to the characteristics of a known satellite system. The author presents the dependencies of changing the geocentric latitude and longitude of the sub-satellite points from time and visualizes their movement.
| Авторы: Доронкина А.Н. (annadoronkina@bk.ru) - Тверской государственный университет (аспирант), Тверь, Россия | |
| Ключевые слова: оптимизация, критерий оптимальности, не-прерывный обзор поверхности земли, эллиптическая орбита, спутниковая система, среда программирования, моделирование |
|
| Keywords: optimisation, the optimality criterion, , elliptical orbit, satellite system, programming environment, modeling |
|
| Количество просмотров: 11540 |
Версия для печати Выпуск в формате PDF (12.50Мб) Скачать обложку в формате PDF (0.36Мб) |
В настоящее время спутниковые системы (СС) используются во многих областях: в связи, ра- дио- и телевещании, навигации, метеорологии, контроле за движением транспорта и др. Для рациональной организации движения искусственных спутников Земли (ИСЗ) требуется решать задачи оптимизации параметров этого движения. Существует много работ на данную тему [1–7 и др.], но они в основном посвящены движению СС по круговым орбитам. Возможности систем с некруговыми (эллиптическими) орбитами недостаточно изучены. В то же время большинство СС (в частности СС непрерывного обзора Земли) используют ИСЗ именно на эллиптических орбитах [8], что обусловлено физическими принципами построения аппаратуры наблюдения.
В работе [9] исследована возможность применения теории групп для решения данной задачи. В связи с этим актуальны задачи оптимизации движения СС с орбитами эллиптического типа. И первым шагом является формирование критерия оптимальности СС [10]. Модель движения СС, параметры которого подлежат оптимизации в задаче непрерывного обзора поверхности Земли СС с орбитами эллиптического типа (ОЭТ), должна отвечать следующим условиям: – система состоит из N ИСЗ, которые движутся по m орбитам по n спутников на каждой, N = m × n; – все спутники движутся по ОЭТ с периодом Tl, – движение ИСЗ невозмущенное; – сопротивление атмосферы, нецентральность поля тяготения Земли, влияние Луны, Солнца, давление солнечного света и другие подобные факторы, оказывающие существенное воздействие на движение спутников, не учитываются; – поверхность Земли является сферой радиуса RЗ.
Орбита каждого k-го ИСЗ Таким образом, структура всей системы ИСЗ определяется 6×N кеплеровскими элементами. Пусть
Обозначим rk радиус-вектор, направленный из центра масс Земли на k-й ИСЗ в момент времени t (рис. 2). Выберем на поверхности Земли произвольную точку А с радиус-вектором rA. Геоцентрическое угловое расстояние f между этой точкой и k-м спутником в момент времени t определяется параметрами rk, rA и t. Обозначим соответствующую зависимость через f(rk, rA, t). Тогда
где (*,*) – операция скалярного произведения векторов; |*| – длина вектора.
Пусть радиус-вектор rA имеет координаты (xA, yA, zA). Координаты (xk, yk, zk) радиус-вектора rk вычисляются по следующим формулам [11]:
где uk – аргумент широты ИСЗ; ϑk – истинная аномалия заданной точки на орбите. Для нахождения истинной аномалии используем следующий алгоритм [12]. 1. Вычисляем период обращения ИСЗ по эллиптической орбите
2. Определяем среднюю аномалию, соответствующую истинной аномалии ϑk в момент времени t: Mk = nk (t – tk). 3. Решаем уравнение Кеплера: Ek=ek sin Ek +Mk и находим эксцентрическую аномалию Ek. Уравнение Кеплера целесообразно решать методом последовательных приближений. 4. Используя формулу Тогда (1) можно переписать следующим образом:
где S – множество точек поверхности Земли; topt – момент времени, когда достигает оптимума левая часть (2). Геоцентрический угловой радиус αk(t) в момент времени t определяется по формуле (рис. 1):
Поскольку rk полностью выражается через параметры орбиты
Обозначим через f(Pорб, rA, t) левую часть неравенства (3). Наша задача такова: найти минимум функции
определенной на множестве
затем проверить выполнение условия (3). Обратим внимание на то, что параметры ak, ek, ik, Ωk, ωk у спутников одной орбиты одинаковые. Значит, 5+n параметров имеют спутники одной орбиты, а вся спутниковая система имеет (5+n)∙m= =5m+N параметров. Поэтому число параметров нашей задачи сокращается с 6N до 5m+N. Каждому моменту времени tj для каждого спутника (индекс k опускаем) при заданных элементах орбиты соответствует подспутниковая точка с долготой λj и геоцентрической широтой ψj, которые вычисляются [11] по следующим формулам:
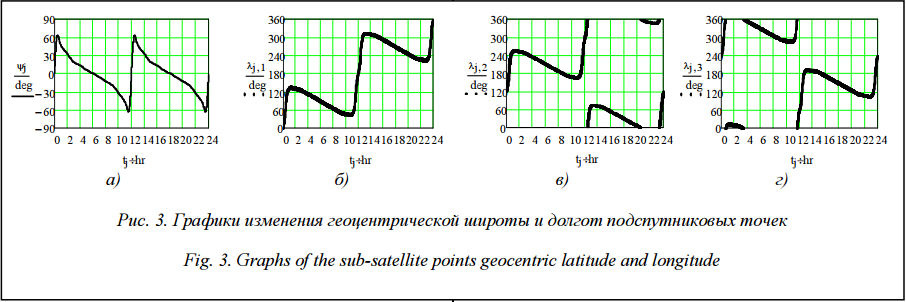
Геометрическое место подспутниковых точек называется трассой ИСЗ [10]. Наглядно представить полученные при реализации описанного в данной статье научно-методического аппарата трассы ИСЗ можно с помощью среды программирования MathCAD2014. В качестве примера рассмотрим трассы трех ИСЗ, распределенных по трем орбитальным плоскостям с высотой перигея 500 км, высотой апогея 40 000 км, с наклонением 63,4 ̊, разнесенных по экватору на 120 ̊. На рисунке 3а изображен график изменения геоцентрической широты (одинаковой для всех трех спутников) подспутниковой точки в зависимости от времени tj, на рисунках 3б, в, г – графики изменения долготы подспутниковой точки для долгот восходящих узлов 0 ̊, 120 ̊, 240 ̊ соответственно. На рисунке 4 приведены траектории движения подспутниковых точек на фоне карты Земли.
Таким образом, использование обоснованного в работе подхода к моделированию процесса оптимизации параметров эллиптических орбит спутниковой системы непрерывного обзора поверхности Земли на основе выбранного критерия оптимальности параметров орбит позволит получить оптимальные значения параметров орбит. Одним из вариантов достижения этого результата может быть решение сформулированной в работе оптимизационной задачи с привлечением современных компьютерных вычислительных методов. Литература 1. Можаев Г.В. Синтез орбитальных структур спутниковых систем (теоретико-групповой подход). М.: Машиностроение, 1989. 304 с. 2. Можаев Г.В. Проблемы оптимизации движения спутниковых систем: состояние исследований и перспективы // Труды МАИ. 2009. Вып. 34; URL: http://www.mai.ru/science/trudy/published.php?ID=7434 (дата обращения: 12.11.2014). 3. Галиев Ш.И., Заботин В.И. О непрерывном обзоре поверхности Земли // Исследование Земли из космоса. 1983. № 1. С. 117–120. 4. Заботин В.И. Модели спутниковых систем глобальной связи на эллиптических орбитах // Исследование Земли из космоса. 1994. № 5. C. 70–76. 5. Горбулин В.И. Оптимизация орбитального построения глобальных космических систем наблюдения. СПб: Изд-во МО РФ, 2001. 171 с. 6. Горбулин В.И. Новый способ оптимизации орбитального построения глобальных спутниковых систем // Полет. 2001. № 12. С. 20–26. 7. Решетников В.Н. Космические телекоммуникации (Начала). Тверь: Изд-во НИИ ЦПС, 2009. 128 с. 8. Тарасенко М.В. Военные аспекты советской космонавтики. М.: Агентство российской печати. ТОО «Николь», 1992. 164 с. 9. Арепин Ю.И., Доронкина А.Н. Теоретико-групповой подход к решению задачи синтеза орбитальных группировок космических аппаратов на орбитах эллиптического типа // 43 воен.-науч. конф. ВА ВКО им. Г.К. Жукова: науч.-методич. сб., секция № 2. Тверь, 2014. 10. Рейзлин В.И. Численные методы оптимизации. Томск: Изд-во Том-ПИ, 2011. 105 с. 11. Баринов К.Н., Бурдаев М.Н., Мамон П.А. Динамика и принципы построения орбитальных систем космических аппаратов. М.: Машиностроение, 1975. 270 с. 12. Эльясберг П.Е. Введение в теорию полета искусственных спутников Земли. М.: Наука, 1965. |
 ;
;
 ) в любой момент «видит» на поверхности Земли сферический круг некоторого углового радиуса αk(t) с центром в подспутниковой точке (рис. 1), изменяющийся с течением времени при полете ИСЗ от своего перигея к апогею. Кроме этого, каждый спутник имеет свой угол обзора. Допустим, что угол обзора любого спутника системы данной задачи один и тот же и равен 2γ (рис. 1). Система ИСЗ обеспечивает непрерывный обзор Земли, если любая точка поверхности в любой момент видна хотя бы с одного из спутников [1].
) в любой момент «видит» на поверхности Земли сферический круг некоторого углового радиуса αk(t) с центром в подспутниковой точке (рис. 1), изменяющийся с течением времени при полете ИСЗ от своего перигея к апогею. Кроме этого, каждый спутник имеет свой угол обзора. Допустим, что угол обзора любого спутника системы данной задачи один и тот же и равен 2γ (рис. 1). Система ИСЗ обеспечивает непрерывный обзор Земли, если любая точка поверхности в любой момент видна хотя бы с одного из спутников [1]. системы характеризуется шестью независимыми кеплеровскими элементами [11]: ik – наклонение, Ωk – долгота восходящего узла, ak – большая полуось, ek – эксцентриситет, ωk – аргумент перигея, τk – время прохождения перигея.
системы характеризуется шестью независимыми кеплеровскими элементами [11]: ik – наклонение, Ωk – долгота восходящего узла, ak – большая полуось, ek – эксцентриситет, ωk – аргумент перигея, τk – время прохождения перигея. – множество кеплеровских параметров орбиты k-го ИСЗ {ak, ek, ik, Ωk, ωk, τk}, которые имеют следующее множество допустимых значений Gk:
– множество кеплеровских параметров орбиты k-го ИСЗ {ak, ek, ik, Ωk, ωk, τk}, которые имеют следующее множество допустимых значений Gk: .
. , (1)
, (1)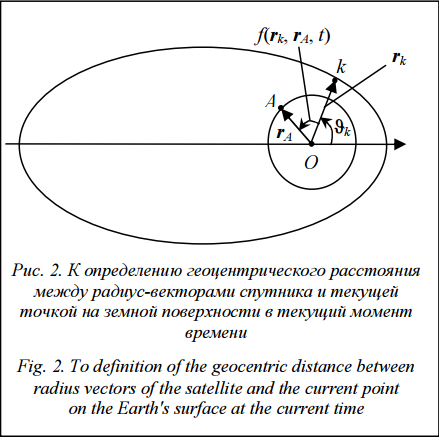
 ,
, ,
,


 , где µ – гравитационная постоянная, равная 398620 км3/с2, и его геоцентрическую угловую скорость:
, где µ – гравитационная постоянная, равная 398620 км3/с2, и его геоцентрическую угловую скорость: .
. , вычисляем истинную аномалию ϑk:
, вычисляем истинную аномалию ϑk:  .
.



 .
.
 . Поэтому для того, чтобы система осуществляла непрерывный обзор Земли, необходимо и достаточно [1] выполнения неравенства
. Поэтому для того, чтобы система осуществляла непрерывный обзор Земли, необходимо и достаточно [1] выполнения неравенства , (2)
, (2) .
. .(3)
.(3) ,
, , то есть решить задачу
, то есть решить задачу ,
, ,
, ,
,  ,
,  , где tΩ – время прохождения ИСЗ экватора в восходящем узле орбиты; ωЗ – угловая скорость вращения Земли, равная 7,29211×10–5 1/c; SΩ – звездное время по Гринвичу в момент прохождения ИСЗ восходящего узла орбиты.
, где tΩ – время прохождения ИСЗ экватора в восходящем узле орбиты; ωЗ – угловая скорость вращения Земли, равная 7,29211×10–5 1/c; SΩ – звездное время по Гринвичу в момент прохождения ИСЗ восходящего узла орбиты.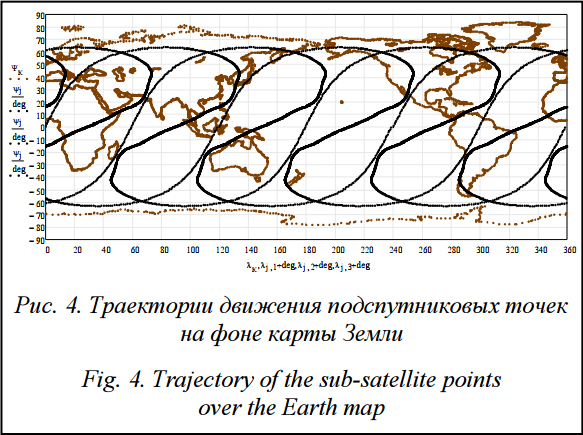
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=3964&lang=&lang=&like=1 |
Версия для печати Выпуск в формате PDF (12.50Мб) Скачать обложку в формате PDF (0.36Мб) |
| Статья опубликована в выпуске журнала № 1 за 2015 год. [ на стр. 87-91 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Метод выбора оптимальной технологии строительства коммуникационного тоннеля
- Методы хранения данных систем видеонаблюдения с использованием грид-технологий
- Подход к моделированию, масштабированию и оптимизации работы биореакторов на основании вычислительной гидродинамики
- Методы оптимизации расписаний параллельных обслуживающих систем
- Вопросы создания АСУ космическими полетами беспилотных аппаратов в околоземном пространстве
Назад, к списку статей