Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Фильтр Калмана как метод вторичной обработки информации с системы ГЛОНАСС
Аннотация:В работе рассмотрены методы местоопределения наземного транспортного средства на основе вторичной обработки информации, поступающей со спутниковой навигационной системы ГЛОНАСС. Точность позиционирования транспортного средства, зависящая от многих факторов, в том числе и от метода нахождения координат, является одним из показателей эффективного управления транспортным средством, что позволяет оперативно контролировать передвижение транспортных средств, фактическое время работы транспортного средства и точность определения расхода топлива. В публикациях, посвященных проблеме местоопределения динамических объектов, как правило, не описываются математические модели и алгоритмы, а приводятся лишь конечные результаты. При этом практически отсутствуют источники, в которых была бы описана четкая алгоритмическая схема, пригодная для написания ПО. Во многом это связано с тем, что данное ПО является либо коммерческой тайной, либо интеллектуальной собственностью. В отличие от имеющихся методов контроля и мониторинга мобильных объектов авторами разработан пошаговый алгоритм фильтра Калмана, позволяющий увеличить точность позиционирования наземного транспортного средства. На основе предложенного алгоритма создано прикладное ПО, обеспечивающее в реальном масштабе времени и в режиме постобработки определение местоположения наземного объекта. Исследованы случаи подвижного и неподвижного состояний наземного транспортного средства, для каждого из которых применены алгоритм фильтра Калмана и метод наименьших квадратов, способствующие увеличению точности позиционирования. Приведена сравнительная характеристика указанных методов на основе выбранных статистических критериев и установлен наиболее точный метод местоопределения подвижного и неподвижного объектов.
Abstract:The paper discusses methods of positioning a land vehicle based on secondary processing of information from GLONASS satellite navigation system. Vehicle positioning accuracy depends on many factors including the method of finding the coordinates. It is one of the indicators of vehicle effective control. Therefore, one can quickly control the vehicles movement, their actual value and the fuel consumption accuracy. The publications devoted to the problem of dynamic objects positioning, as a rule, do not describe mathematical models and algorithms, they just display the final results. In fact there are no sources, which can clearly describe an algorithmic scheme suitable for developing software. This is due to the fact that the software is a trade secret or an intellectual property. In contrast to existing methods of mobile objects control and monitoring, the authors have developed a Kalman filter algorithm step by step. It increases the positioning accuracy of a land vehicle. The algorithm is a basis for application software, which determines the land object location in real-time and post-processing mode. The paper discusses the cases of mobile and stationary state of a land vehicle. Each case shows using Kalman filter algorithm and the least squares method to enhance positioning accuracy. There is a comparative characteristics of these methods on the basis of selected statistical criteria. The authors set the most accurate method of positioning mobile and stationary objects.
| Авторы: Болодурина И.П. (prmat@mail.osu.ru) - Оренбургский государственный университет (профессор, зав. кафедрой), Оренбург, Россия, доктор технических наук, Нугуманова А.А. (alaymir@mail.ru) - Оренбургский государственный университет (аспирант), Оренбург, Россия, Решетников В.Н. (rvn_@mail.ru) - Центр визуализации и спутниковых информационных технологий ФНЦ НИИСИ РАН (профессор), Москва, Россия, доктор физико-математических наук | |
| Ключевые слова: метод наименьших квадратов, фильтр калмана, транспортное средство, глонасс, местоопределение |
|
| Keywords: method of least squares, Kalman filter, vehicle, glonass, positioning |
|
| Количество просмотров: 13303 |
Версия для печати Выпуск в формате PDF (9.58Мб) Скачать обложку в формате PDF (1.29Мб) |
Одной из наиболее важных проблем в сфере контроля и мониторинга мобильных объектов является их местоопределение. Погрешность в точность позиционирования транспортного средства вносят такие факторы, как атмосфера, возвышенные объекты, горы и др. [1]. Для определения точных координат различных объектов, скорости их движения и других факторов служит современная система глобальной спутниковой навигации ГЛОНАСС. Хотя использование ГЛОНАСС весьма актуально, анализ показывает, что технология позиционирования и идентификации мобильных объектов на пространственных цифровых моделях в транспортной сфере развита недостаточно. В публикациях, посвященных проблеме местоопределения, как правило, не описываются математические модели и алгоритмы, а приводятся лишь конечные результаты (например [2]). При этом практически отсутствуют источники с описанием четкой алгоритмической схемы, пригодной для написания ПО. Поэтому разработка инструментария для точного местоопределения наземных транспортных средств является актуальной задачей. Методы вторичной обработки информации В радиолокационных станциях автоматического сопровождения и обработки сигналов в инерциальных навигационных системах в качестве алгоритма вторичной обработки наиболее пригоден фильтр Калмана [3–5]. Алгоритм работает в два этапа. На первом этапе фильтр Калмана экстраполирует значения переменных состояния, а также их неопределенности, на втором – по данным измерения уточняется результат экстраполяции. Благодаря пошаговой природе алгоритма он может в реальном времени отслеживать состояние объекта (без заглядывания вперед, используя только текущие замеры и информацию о предыдущем состоянии и его неопределенности) [6, 7]. Фильтр Калмана основан на квадратичном критерии качества [4, 8, 9], то есть обеспечивает минимум среднеквадратических ошибок оценок. Оценки определяются на основе условных математических ожиданий вектора состояния объекта наблюдения. Фильтр Калмана является рекурсивным методом, оперирует оценками не только состояния, но и неопределенности вектора состояния, опираясь на формулу Байеса условной вероятности: где По формуле Байеса можно более точно пересчитать вероятность, учитывая как ранее известную информацию, так и новые данные [7]. Рассмотрим постановку задачи в дискретном случае. Пусть объект и измерение описываются уравнениями
где x – исходные данные; z – измерения, полученные с помощью прогнозирования; Требуется, используя измеренные значения переменной zi, найти несмещенную оценку
где оценка Решение задачи определяется следующим образом [2, 7, 10]:
Здесь Кроме априорной оценки, выражение для оценки содержит поправочный член, пропорциональный невязке – разности между измеренным значением переменной zi и ее оценкой. При вычислении оценки каждый шаг нужно начинать с определения априорной дисперсионной матрицы Допустим, что в момент времени ti получена оценка вектора состояния системы Разработанный алгоритм фильтра Калмана Алгоритм фильтра Калмана включает следующие шаги: 1) формирование априорной матрицы 2) формирование дисперсионной матрицы P, в которой диагональ матрицы заполняется единицами, элементы ниже главной диагонали являются нулями, а элементы выше главной диагонали вычисляются по формуле 3) формирование матрицы H – матрицы преобразования состояния системы, в которой первый столбец заполняется единицами, остальные элементы вычисляются по формуле 4) формирование матрицы наблюдений C, в которой первый элемент равен единице, остальные элементы равны нулю; 5) получение матрицы В – матрицы перехода между состояниями: H × HT = В; 6) нахождение обратной матрицы В–1 и преобразование с помощью LU-разложения; 7) формирование матрицы идентичности Y с элементами
где К – усиление фильтра Калмана, которое вычисляется по формуле (6); 8) формирование матрицы N – матрицы измерений 9) пересчет матрицы В: 10) расчет матрицы m – матрицы определения шума процесса; 11) пересчет mij = mij×(x – K), x – входные данные; 12) получение априорной оценки 13) получение апостериорной оценки Программная реализация приведенного алгоритма фильтра Калмана позволяет получить координаты наземного транспортного средства c меньшими отклонениями. Сравнительная характеристика В данной работе проведено исследование для двух случаев: когда транспортное средство движется и когда находится на стоянке. Для оценки работы фильтра Калмана при обработке информации с системы ГЛОНАСС используем метод наименьших квадратов (МНК) [8, 9], где минимизируемый функционал имеет вид
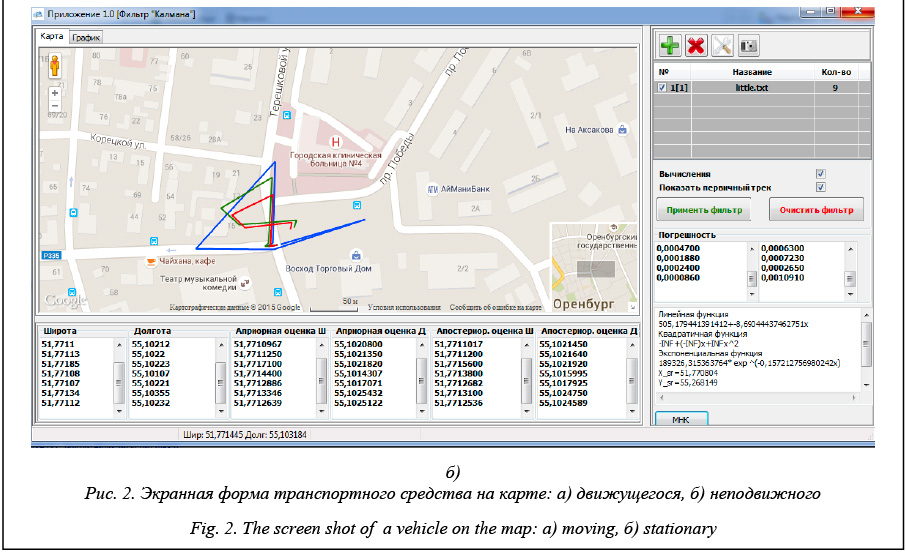
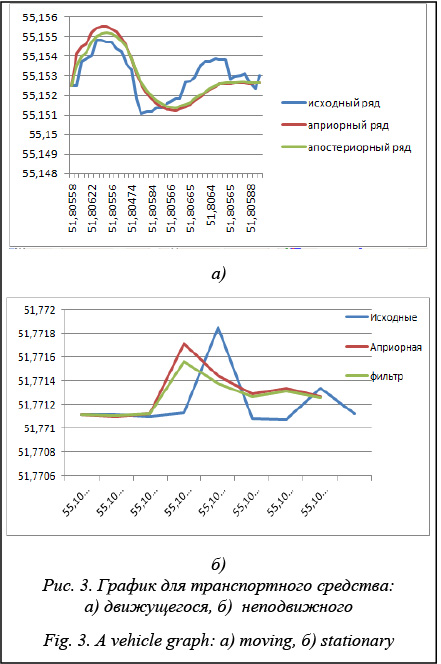
Рассмотрим задачу точного местоопределения координат транспортного средства на основе вторичной обработки информации спутниковой навигационной системы ГЛОНАСС алгоритмами фильтра Калмана и МНК. Информационную базу составляют данные о местоположении маршрутных автобусов города Оренбурга, полученные с помощью программы «АТ Наблюдатель». На основе приведенного алгоритма разработано ПО [11], отображающее траекторию движения транспортного средства (рис. 2), зафиксированную программой «АТ Наблюдатель» (синий цвет), априорную оценку траектории (красный цвет) и траекторию, полученную в результате применения фильтра Калмана (зеленый цвет). На рисунке 3 приведены траектории движения транспортного средства с указанием координат его местоположения. Проведенная проверка исходных данных на нормальный закон распределения позволяет оценить эффективность методов по различным критериям: средняя ошибка аппроксимации, коэффициент корреляции и критерий Фишера.
Полученные значения используемых статистических критериев, приведенные в таблице, позволяют сделать вывод о том, что для определения координат подвижного транспортного средства можно использовать оба метода. Тем не менее, результат обработки информации на основе фильтра Калмана является более точным с точки зрения допустимых предельных значений названных критериев. Критерии оценки работы методов Methods evaluation criteria
Примечание: П – подвижное транспортное средство, Н – неподвижное транспортное средство. Проведена проверка эффективности фильтра Калмана и МНК для задачи местоопределения неподвижных объектов, то есть транспортных средств, находящихся на стоянке. Неподвижному транспортному средству должна соответствовать окрестность без резких скачков, но из-за факторов, влияющих на точность (атмосфера, высокие здания и так далее), программа «АТ Наблюдатель» фиксирует траекторию, соответствующую движущемуся объекту в некоторой окрестности точки расположения, что является неприемлемым с экономиче- ской точки зрения (расход топлива, увеличение пробега транспортного средства и т.д.). Вычисленные значения критериев в случае корректирования местоположения неподвижного транспортного средства, приведенные в таблице, позволяют сделать вывод о том, что фильтр Калмана является более точным для определения координат. МНК не удовлетворяет допустимым пределам выбранных критериев, в частности, предельным значениям критерия Фишера. В заключение отметим, что разработанный алгоритм фильтра Калмана позволит решить проблему позиционирования наземных транспортных средств. В результате проведенной сравнительной характеристики установлено, что предпочтительным методом для корректирования местоположения подвижных и неподвижных наземных транспортных средств на основе вторичной обработки информации, поступающей со спутниковой навигационной системы ГЛОНАСС, является фильтр Калмана. Литература 1. Решетников В.Н. Космические телекоммуникации. Системы спутниковой связи и навигации. СПб: Ленинград. изд-во, 2010. 134 с. 2. Манухов В.Ф., Разумов О.С., Спиридонов А.И., Тюряхин А.С. Спутниковые методы определения координат пунктов геодезических сетей: учеб. пособие. Саранск: Изд-во Мордов. ун-та, 2009. 108 с. 3. Болодурина И.П., Решетников В.Н., Таспаева М.Г. Методы уточнения интегрированного наземно-космического мониторинга в системе ГЛОНАСС // Программные продукты и системы. 2011. № 4. С. 130–134. 4. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем: учеб. пособие; [пер. с англ.]. М.: Мир, 1971. 400 с. 5. Сучилин В.И., Волобуев Г.Б. Оценка возможностей повышения точности местоопределения наземного подвижного объекта путем вторичной обработки показаний аппаратуры пользователя систем GPS NAVSTAR и/или ГЛОНАСС // Кибернетика и высокие технологии XXI века: сб. докл. VIII Междунар. науч.-технич. конф. Воронеж, 2007. Т. 2. С. 1066–1073. 6. Sigurd I. Aanonsen. The Ensemble Kalman Filter in Reservoir Engineering – a Review / Sigurd I. Aanonsen, Dean S. Oliver, Albert C. Reynolds, Brice Valles. Intern. Research Institute of Stavanger, SPE Journ., 2009, no. 14, pp. 393–412. 7. Welch G., Bishop G. An Introduction to the Kalman Filter / Welch G// UNC – Chapel Hill, TR 95-041, 2006; URL: http://cs.unc.edu/~welch/media/pdf/kalman_intro (дата обращения: 30.08.2015). 8. Сергиенко А.Б. Цифровая обработка информации. СПб: БХВ–Петербург, 2011. 768 с. 9. Тихонов В.И., Шахтарин Б.И., Сизых В.В. Случайные процессы. М.: Горячая линия–Телеком, 2009. 399 с. 10. Яценков В.С. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. М.: Горячая линия–Телеком, 2005. 272 с. 11. Болодурина И.П., Нугуманова А.А., Курочкина Т.А. Вторичная обработка информации для корректировки местоположения наземного транспортного средства методом фильтра Калмана. Свид. о регистр. прогр. для ЭВМ № 50201550245. М.: ЦИТиС, 2015. | |||||||||||||||||||||||||||||
 , (1)
, (1) – вероятность наступления апостериорной оценки;
– вероятность наступления апостериорной оценки;  – вероятность априорной оценки;
– вероятность априорной оценки;  – вероятность получения апостериорной оценки при выполнении априорной оценки;
– вероятность получения апостериорной оценки при выполнении априорной оценки;  – вероятность получения априорной оценки при выполнении апостериорной оценки.
– вероятность получения априорной оценки при выполнении апостериорной оценки. (2)
(2) – апостериорная оценка, полученная с помощью фильтрации;
– апостериорная оценка, полученная с помощью фильтрации;  – априорная оценка; А – матрица эволюции процесса,
– априорная оценка; А – матрица эволюции процесса,  ; С – матрица наблюдений,
; С – матрица наблюдений,  ; vi – белый шум с интенсивностью R0.
; vi – белый шум с интенсивностью R0. вектора xi, обеспечивающего минимум квадрата ошибки (
вектора xi, обеспечивающего минимум квадрата ошибки ( ):
): , (3)
, (3) является несмещенной, если Mei=0.
является несмещенной, если Mei=0. (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) является математическим ожиданием вектора xi и служит его априорной оценкой, то есть оценкой, которая получается до измерения zi; условие
является математическим ожиданием вектора xi и служит его априорной оценкой, то есть оценкой, которая получается до измерения zi; условие  означает, что ни одна координата выходной переменной не измеряется точно;
означает, что ни одна координата выходной переменной не измеряется точно;  – дисперсионная матрица ошибки
– дисперсионная матрица ошибки  , то есть ошибки априорной оценки; Pi – дисперсионная матрица ошибки
, то есть ошибки априорной оценки; Pi – дисперсионная матрица ошибки  , то есть ошибки искомой (апостериорной) оценки.
, то есть ошибки искомой (апостериорной) оценки. . Так как матрицы
. Так как матрицы  и необходимо получить оценку в момент ti+1. Для этого строим прогноз априорной оценки
и необходимо получить оценку в момент ti+1. Для этого строим прогноз априорной оценки  в момент ti+1, опираясь на оценку вектора состояния системы
в момент ti+1, опираясь на оценку вектора состояния системы  (рис. 1).
(рис. 1).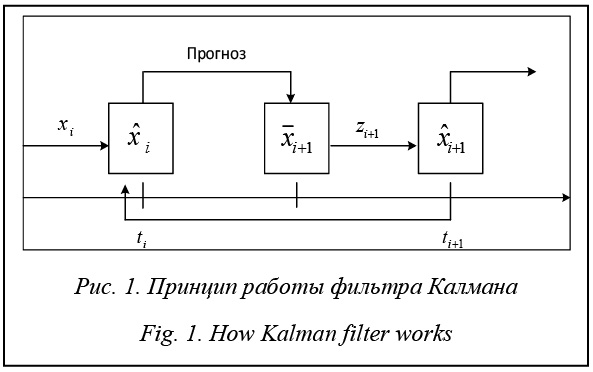
 , апостериорной матрицы
, апостериорной матрицы  ;
; (f – порядок фильтра);
(f – порядок фильтра);
 ,
,
 ; повторяя шаги 7–9, получаем матрицу
; повторяя шаги 7–9, получаем матрицу  ;
;


 . (10)
. (10)
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4079&lang= |
Версия для печати Выпуск в формате PDF (9.58Мб) Скачать обложку в формате PDF (1.29Мб) |
| Статья опубликована в выпуске журнала № 4 за 2015 год. [ на стр. 116-120 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Моделирование состояния и поведения судна на базе фильтра Калмана
- Прогноз состояния объекта на основе применения фильтра Калмана и глубоких нейронных сетей
- Интервально-дифференциальные уравнения в структуре нечеткого фильтра Калмана при управлении сложными технологическими объектами
- Алгоритм определения направления движения локализованных объектов транспортных потоков на цифровых космических снимках
- Нечеткий фильтр калмана в структуре алгоритма решения обратных задач для экономических объектов
Назад, к списку статей