Эквациональная характеристика формул LTL
| Кораблин Ю.П. (y.p.k@mail.ru) - Российский государственный социальный университет, г. Москва (профессор), Москва, Россия, доктор технических наук, Шипов А.А. (a-j-a-1@yandex.ru) - Московский технологический университет (МИРЭА) (старший инженер-программист), Москва, Россия, кандидат технических наук | |
| Ключевые слова: ctl, ltl, формула временной логики, автомат бюхи, модель крипке, верификация |
|
| Keywords: ctl, ltl, temporal logic formula, Buchi automaton, kripke structure, verification |
|
|
|
|
Прежде чем выполнять верификацию для конкретной системы, необходимо сформулировать те ее свойства, наличие или отсутствие которых требуется доказать. Привычная разговорная и письменная речь зачастую не позволяет сделать это однозначно, поэтому были разработаны специальные механизмы для решения данной проблемы [1, 2], в частности, метод, основанный на использовании различных моделей временной логики: логики линейного времени (LTL), ветвящегося времени (CTL), а также обобщающей их логики CTL* [3–5]. Данные логики лишены недостатков с точки зрения однозначности формулируемых на их базе свойств. Однако, как показывает практика, их мощность позволяет формулировать лишь относительно небольшое количество однотипных условий, а этого, в свою очередь, может быть недостаточно для проверки тех или иных свойств модели конкретной системы.
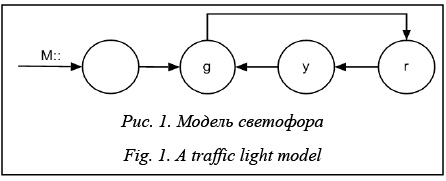
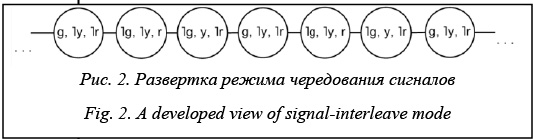
Предикаты модели принимают следующие значения: g – включен зеленый сигнал светофора, r – красный, y – желтый. Как видим, светофор из своего некоторого первоначального состояния переходит в режим, в котором наступает строгое чередование зеленого, красного и желтого сигналов. Предположим, что стоит задача верификации работы этого режима с доказательством строгого чередования сигналов. Представить это можно в виде развертки, изображенной на рисунке 2.
Gg = g ∧ X(g) ∧ XX(g) ∧ XXX(g)… G(Xr) = Xr ∧ X(Xr) ∧ XX(Xr) ∧ XXX(Xr)… G(XXy) = XXy ∧ X(XXy) ∧ XX(XXy) ∧ XXX(XXy)… Объединив их, получим последовательность вида φ = g ∧ X(g ∧ r) ∧ XX(g ∧ r ∧ y) ∧ XXX(g ∧ r ∧ y)… Очевидно, что данная последовательность не совпадает с описанной ранее последовательностью. Этот пример иллюстрирует неэффективность оператора G в задачах определения строгого чередования предикатов на бесконечной последовательности состояний. Таким образом, встает проблема разработки некоторого механизма формулировки свойств системы, который позволял бы расширить базовое множество типовых выражений и был бы достаточно удобным для выполнения проверки на моделях. Эквациональная характеристика операторов LTL (RLTL) Рассмотрим рекурсивные представления основных базовых операторов логики LTL (табл. 1).
Символ «∘» обозначает оператор продолжения (конкатенация выражений), что позволяет использовать оператор X в неявном виде, а также упростить его восприятие, в частности, запись φ1 ∘ φ2 будет пониматься как «φ2 следует за φ1». Под символом «∆», далее именуемым предикатом неопределенности, будем понимать неопределенное множество предикатов для конкретного состояния вычислительной последовательности относительно тех предикатов, которые принимают в нем истинностные значения. В таблице 1 представлены все операторы, используемые в LTL. Поскольку все основные операторы LTL могут быть приведены к своим рекурсивным представлениям, авторы полагают, что приведение их к некоторому унифицированному виду, который в последующем именуется эквациональной характеристикой, позволит существенно расширить описательную способность логики LTL и упростит процесс верификации ее формул. Сочетания операторов LTL также могут быть выведены с помощью аксиом в рамках эквациональной характеристики. В таблице 2 приведены некоторые сочетания операторов LTL.
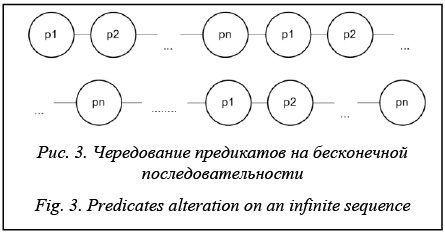
Примеры описания свойств в RLTL-нотации Рассмотрим некоторые типы свойств, описать которые можно, лишь используя предлагаемый механизм эквациональной характеристики для логики LTL. Одним из таких типов будет тип строго чередующихся последовательностей предикатов на бесконечной вычислительной последовательности состояний. В общем виде данный тип представлен на рисунке 3.
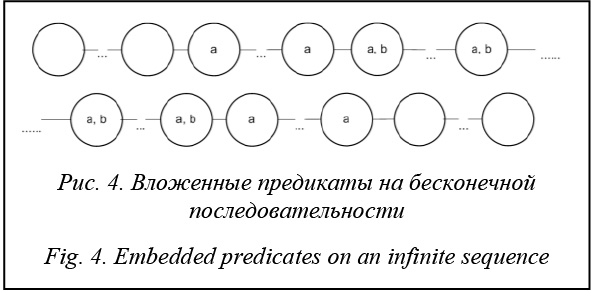
Fr1 = p1 ∘ Fr2, Fr2 = p2 ∘ Fr3, … Fr(n) = pn ∘ Fr1. Пример данного типа уже был рассмотрен при описании модели работы светофора. Сформулируем заданное для нее в общем виде условие φ = Xg ∧ XXr ∧ XXXy ∧ XXXXg ∧… с помощью эквациональной характеристики: Fr1 = ∅ ∘ Fr2; Fr2 = g ∘ Fr3; Fr3 = r ∘ Fr4; Fr4 = y ∘ Fr2. Под символом «∅» в дальнейшем будем понимать пустое множество предикатов, означающее, что ни один из предикатов множества AP [6] не принимает значение «истина». Таким образом, сформулированное условие представляет собой систему из четырех рекурсивных уравнений, строго задающих необходимую последовательность предикатов (сигналов светофора). Еще одним типом свойств, которые нельзя выразить стандартными формулами LTL, является вхождение (появление) вложенных последовательностей предикатов на бесконечной вычислительной последовательности состояний. В общем виде данный тип изображен на рисунке 4.
Представим данный тип в виде системы рекурсивных уравнений Φ: Fr1 = ∅ ∘ Fr1 ∨ a ∘ Fr2; Fr2 = a ∘ Fr2 ∨ (a ∧ b) ∘ Fr3; … Fr(k) = (a ∧ b) ∘ Fr(k) ∨ a ∘ Fr(k+1); Fr(k+1) = a ∘ Fr(k+1) ∨ ∅ ∘ Fr1. В качестве примера можно рассмотреть модель работы подсистемы космического спутника, отвечающую за работу передатчика и приемника радиосигнала (рис. 5).
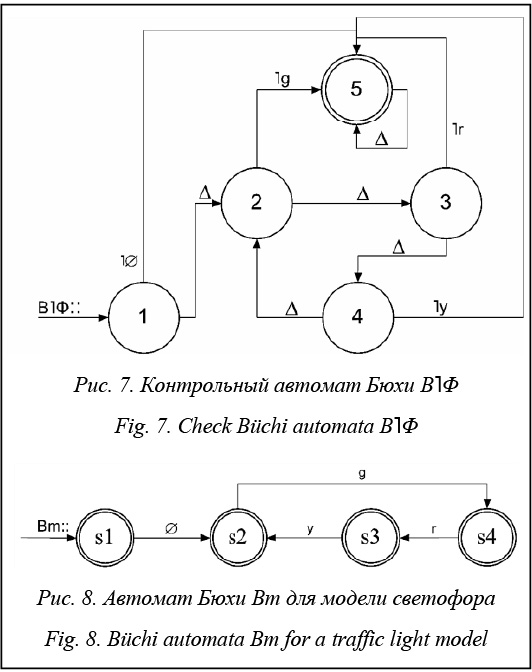
Система рекурсивных уравнений, характеризующая данную последовательность, будет состоять из четырех уравнений: Fr1 = ∅ ∘ Fr1 ∨ p ∘ Fr2; Fr2 = p ∘ Fr2 ∨ (p ∧ t) ∘ Fr3; Fr3 = (p ∧ t) ∘ Fr3 ∨ p ∘ Fr4; Fr4 = p ∘ Fr4 ∨ ∅ ∘ Fr1. Верификация RLTL Покажем, что, задавая некоторое свойство, представленное системой рекурсивных уравнений, легко выполнить его верификацию на заданной модели. В качестве примера возьмем рассмотренную выше модель светофора, представленную на рисунке 1, а в качестве проверяемого условия – систему рекурсивных уравнений Φ, означающую то, что «со второго состояния светофора начинается строгое чередование зеленого, красного и желтого сигналов»: Φ = Fr1 = ∅ ∘ Fr2; Fr2 = g ∘ Fr3; Fr3 = r ∘ Fr4; Fr4 = y ∘ Fr2. Для выполнения верификации формул RLTL будет использована та же самая методика верификации, что и для формул LTL, описанная в [6]. На первом этапе сформулируем отрицание проверяемого условия, используя аксиомы, приведенные выше: ˥Φ = ˥Fr1 = ˥∅ ∨ ∆ ∘ ˥Fr2; ˥Fr2 = ˥g ∨ ∆ ∘ ˥Fr3; ˥Fr3 = ˥r ∨ ∆ ∘ ˥Fr5; ˥Fr4 = ˥y ∨ ∆ ∘ ˥Fr2. На втором этапе для полученной системы рекурсивных уравнений построим контрольный автомат. Для упрощения процесса построения контрольного автомата применим аксиому A15 к полу- ченной системе рекурсивных уравнений и получим следующую систему рекурсивных уравнений: ˥Φ = Fr1 = ˥∅ ∘ Fr5 ∨ ∆ ∘ Fr2; Fr2 = ˥g ∘ Fr5 ∨ ∆ ∘ Fr3; Fr3 = ˥r ∘ Fr5 ∨ ∆ ∘ Fr5; Fr4 = ˥y ∘ Fr5 ∨ ∆ ∘ Fr2; Fr5 = ∆ ∘ Fr5.
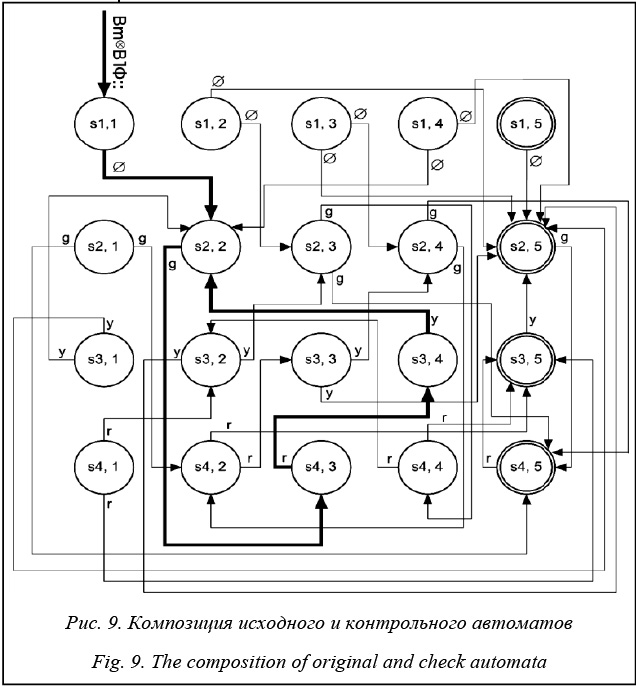
Теперь построим композицию автомата B˥Φ и автомата Bm нашей модели светофора (рис. 8) согласно методу, описанному в [6]. Результатом композиции перехода, помеченного предикатом неопределенности ∆, с переходом, помеченным некоторым предикатом φ, является переход, помеченный φ, так как неопределенность устраняется. Результат композиции представлен на рисунке 9. Жирными стрелками показаны переходы, которые достижимы из начального состояния (s1, 1). Очевидно, что из начального состояния невозможно попасть ни в одно из допускающих состояний, что означает невыполнимость ˥Φ, а следовательно, выполнимость Φ. Таким образом, свойство «со второго состояния светофора начинается строгое чередование зеленого, красного и желтого сигналов» действительно выполняется.
Авторы полагают, что использование данного представления формул временной логики позволит существенно увеличить гибкость и практичность верификации, поскольку предлагаемый метод может быть с легкостью внедрен в уже существую- щие технологии верификации на базе метода Model Checking или проверки на моделях. Литература 1. Кораблин Ю.П. Семантика языков распределенного программирования: учеб. пособие. М.: Изд-во МЭИ, 1996. 102 с. 2. Hopcroft J.E., Motwani R., Ullman J.D. Introduction to Automata Theory, Languages, and Computation, 3/E – Pearson/Addison Wesley, 2007, 535 p. 3. Велдер С.А., Лукин М.А., Шалуто А.А., Яминов Б.Р. Верификация автоматных программ. СПб: Наука, 2011. 244 с. 4. Kröger F., Merz S. Temporal Logic and State Systems. Springer (March 27, 2008), 436 p. 5. Manna Z., Pnueli A. The Temporal Logic of Reactive and Concurrent Systems: Specification. 1992, 427 p. 6. Карпов Ю.Г. Model Checking. Верификация параллельных и распределенных программных систем. СПб: БХВ-Петербург, 2010. 552 с. 7. Кораблин Ю.П., Куликова Н.Л. Логические методы доказательства и тестирования программ // Информационные средства и технологии: тез. докл. Междунар. конф. М.: Изд-во МФИ, 1996. 9 с. 8. Кораблин Ю.П. Семантика языков программирования. М.: Изд-во МЭИ, 1992. 100 с. 9. Кораблин Ю.П., Косакян М.Л. Анализ моделей программ на языке асинхронных функциональных схем средствами темпоральной логики линейного времени // Программные продукты и системы. 2014. № 2 (106). С. 5–10. 10. Алагич С., Арбиб М. Проектирование корректных структурированных программ. М.: Радио и связь, 1979. 292 с. 11. Hoare C.A.R. An axiomatic basis for computer programming. Northern Irelan: Queen's Univ. of Belfast, 1969, pp. 576–580. 12. Ábrahám E., Havelund K. (Eds). Tools and Algorithms for the Construction and Analysis of Systems. Springer (March 24, 2014), 652 p. 13. Bérard B., Bidoit M., Finkel A., Laroussinie F., Petit A., Petrucci L., Schnoebelen P. Systems and Software Verification. Model Checking Techniques and Tools. Springer, 2001, 190 p. |


.jpg)

http://swsys.ru/index.php?page=article&id=4087&lang=&lang=%E2%8C%A9=en&like=1 |
|
Perhaps, you might be interested in the following articles of similar topics:
- Верификация моделей систем на базе эквациональной характеристики формул LTL
- Построение моделей систем на базе эквациональной характеристики формул LTL
- Метод ограничений верифицируемых моделей
- Метод распределенного анализа свойств верифицируемых моделей
- Унифицированное представление формул логик LTL и CTL системами рекурсивных уравнений