Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Проблемы оценки показателей навигационной безопасности плавания кораблей
Аннотация:Рассмотрены способы расчета параметров и показателей навигационной безопасности плавания кораблей. Показано, что способ, реализованный в Мореходных таблицах МТ-2000 и Инструкции по навигационному оборудованию ИНО-2000, устарел, содержит методические неточности и имеет низкую эффективность. Подобные недостатки характерны и для кораблевождения в целом. Авторами предложено разработать Правила решения вероятностных задач кораблевождения, в которых должны быть устранены отмеченные неточности, а также комплексный учебник по методам решения вероятностных задач кораблевождения, охватывающий разделы нескольких учебных дисциплин с дальнейшей алгоритмизацией правил для их машинной реализации.
Abstract:The article describes calculation methods of ship navigational safety parameters and indicators. It shows that the method implemented in navigational tables MT-2000 and the Instruction for navigation equipment INO-2000 is outdated. It contains methodological inaccuracies and has low efficiency. Such shortcomings are typical for ship navigation in general. The authors suggested developing the Rules of solving navigation probabilistic problems without marked discrepancies. They also suggested creating an integrated textbook, which should contain methods for solving navigation probability problems and cover sections of several disciplines to further algorithmization of rules for their machine implementation.
| Авторы: Кушнарёв А.Г. (komandor.99@mail.ru) - НИИ «Центрпрограммсистем» (филиал в г. Санкт-Петербурге) (профессор, главный научный сотрудник), Санкт-Петербург, Россия, кандидат технических наук, Михальский В.А. (komandor.99@mail.ru) - ВУНЦ ВМФ «Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова» (доцент, научный сотрудник), Санкт-Петербург, Россия, доктор технических наук | |
| Ключевые слова: интервал корреляции, показатели, безопасное расстояние, закон распределения, средняя квадратическая, предельная, погрешности, граница навигационной опасности, кораблевождение, эксцесс, квантиль, навигационная безопасность плавания |
|
| Keywords: correlation interval, indicators, safe distance, the law of distribution, mean square, limit, error, limit of navigational hazard, sailing, kurtosis, quantile, sailing navigation safety |
|
| Количество просмотров: 6305 |
Версия для печати Выпуск в формате PDF (8.31Мб) Скачать обложку в формате PDF (1.24Мб) |
В настоящее время, несмотря на оснащение флота высокоточными средствами навигации, а также эффективными средствами наблюдения и связи, остается актуальной проблема навигационной безопасности плавания (НБП) кораблей ВМФ. Подтверждение этому – катастрофа лайнера «Коста Конкордия», на котором, по-видимому, показатели НБП вообще не определялись ни ручным способом, ни в автоматическом режиме. О том, что только высокоточных средств навигации без оценки показателей НБП для ее обеспечения недостаточно, говорит и навигационная аварийность прекрасно оснащенных кораблей ВМФ США и НАТО. В 2005–2007 гг. зафиксированы, например, посадка на мель крейсера «Порт Ройал», столкновения с подводными скалами атомных подводных лодок «Сьюперб», «Сан-Франциско», «Рубин». Для ВМФ проблема НБП стоит еще более остро, так как в данном случае речь идет о навигационной безопасности в условиях боевых действий (НББД). При этом, во-первых, предъявляются более высокие требования к вероятности ее обеспечения и, во-вторых, этот вид обеспечения навигационной безопасности проявляется в мирное время только как НБП и поэтому несет в себе достаточно серьезную скрытую угрозу. В таблице 1 приведены результаты анализа условий, в которых происходили навигационные аварии боевых кораблей ВМФ СССР. Видно, что 80 % из них произошло при плавании вблизи берега, а 56 % – в пункте собственного базирования или на ближних подходах к нему. На такие же условия в ММФ СССР приходилось 85 % аварий [1]. Проблема обеспечения НБП в современном кораблевождении заключается в том, что существую- щий метод определения показателей НБП содержит, как выяснилось, некоторые методические неточности (ошибки), которые могут привести, особенно в боевых условиях, к непредсказуемым последствиям. Таблица 1 Распределение аварийных происшествий по условиям плавания, % Table 1 Emergency incidents distribution according to navigating conditions, %
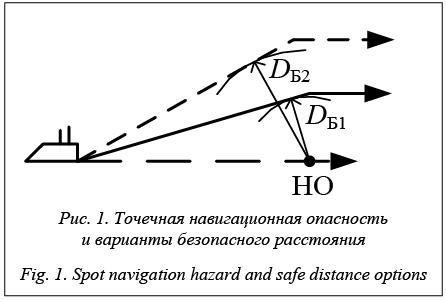
Так, обеспечение НБП включает несколько крупных задач, одна из которых состоит в правильном определении и оценке ее показателей. Эта задача решается штурманской службой ВМФ на основании руководящих документов и инструкций [2–4], которые содержат одни и те же методические ошибки, заключающиеся в неправильном определении аргументов основного показателя НБП и принятии в качестве основного закона распределения для решения задач НБП нормального (закона Гаусса). Покажем влияние этих неточностей на примере задачи обхода точечной навигационной опасности (минной банки). При этом, как известно, значения вероятностей одного и того же события, рассчитанные с использованием разных законов распределения, значительно различаются, что влечет за собой и различия в расчетах показателей этого события. Основным показателем НБП является безопасное (минимально допустимое) расстояние DБ (на рисунке 1 – DБ1 (для закона распределения Гаусса) и DБ2 (для закона распределения Лапласа)) от боевого корабля или от линии его пути до навигационной опасности (НО), соответствующее заданной вероятности Рзд НБП (некасания кораблем границы НО или приближения к ней на некоторое установленное или принятое расстояние DЗР).
в конечном итоге определяющей предельную погрешность места корабля по направлению на НО ( В выражении (1) оба аргумента, и КР1Г(Рзд), и mМК, в общем случае неточны (ошибочны). Докажем это. 1. Еще в работе [5] содержалось предложение использовать для решения задач НБП закон распределения Лапласа (Л) «как обеспечивающий более осторожные оценки» величины DБ. Однако это предложение не было подтверждено экспериментальными данными и не было уточнено понятие осторожности оценки НБП. При подготовке Методик вероятностных расчетов при решении навигационных задач на кораблях и судах ВМФ [6] были исследованы 44 совокупности эмпирических распределений погрешностей оценок большинства навигационных параметров (НП) в различных условиях плавания с привлечением свыше 32 тысяч независимых измерений (для сравнения: в классическом учебнике [7] рекомендуется при изучении закона распределения одного НП произвести не менее 100 измерений). Результаты исследования этих распределений показали, что закон Гаусса обеспечит решение задачи НБП на кораблях с некоторым запасом только в 14 % случаев, а в остальных 86 % – со значительным недостатком. Закон Лапласа, наоборот, в 88 % случаев обеспечивает решение с запасом и только в 12 % – с незначительным недостатком. Если, например, погрешности места корабля подчиняются закону Лапласа и кораблю при Рзд=0,997 (обход минной банки) следует пройти на расстоянии DБ2, а расчеты безопасного расстояния выполняются на основании закона Гаусса, то корабль пройдет на расстоянии DБ1, то есть в 1,5 раза ближе к НО. Следовательно, при расчетах показателей НБП должен использоваться закон Лапласа, рабочая таблица которого имеется в Методиках [6]. 2. Вторым аргументом в выражении (1) является СКП места корабля по направлению на НО mМК. Традиционно в кораблевождении величины СКП mМК и ММК рассчитывают с использованием СКП навигационных параметров mНП (включая параметры счисления). Величины mНП определяются на испытаниях морских средств навигации (МСН), как правило, при ограниченных продолжительности наблюдений tН и числе независимых измерений N=1+tН/τК, эквивалентном величине tН. Здесь τК – интервал корреляции погрешностей МСН. Например, для навигационных комплексов новых типов и глобальных спутниковых систем в некоторых условиях tК=5 ч и при tН=72 ч число N»15. Полученная в таких условиях экспериментальная оценка СКП mНП является неточной величиной, качество которой характеризуется доверительным интервалом mНП,l При N=15 и Рдв=0,95, …, 0,997 коэффициент K´=1,6, …, 2,3. Это значит, что при расчетах по формуле (1) корабль на рисунке 1 пройдет еще примерно вдвое ближе к НО, чем надлежит, а суммарная кратность недопустимого сближения с НО вследствие недостатков выражения (1) равна приблизительно 3 (при Рзд=0,997). 3. Рассчитаем вероятность благополучного прохода корабля мимо НО (обеспечиваемую вероятность Роб) при сближении корабля с нею в 3 ра- за против надлежащего расстояния для Рзд=0,997 и допускаемом числе касаний границы НО nдп=1000(1–Рзд)=3 на 1000 проходов кораблей вблизи НО. Квантиль вероятности 0,997 закона Лапласа КвЛ(0,997)=4,64; квантиль искомой обеспечиваемой вероятности КвЛ(Роб)=4,64/3=1,55. По таблице односторонней функции распределения закона Лапласа находим Роб=РЛ(1,55)=0,928. Ожидаемое фактическое количество касаний НО nФ=72. Результаты подобных расчетов для других Рзд приведены в следующем выводе:
4. Выражение (1) содержит еще одну важную ошибку: в нем используются средняя квадрати- ческая (mМК) и предельная ( Посмотрим на примере, как влияет пренебрежение погрешностями положения границ НО и графических построений на результаты расчетов безопасного расстояния. Пусть масштаб плана порта имеет С=10 000, радиальная СКП обсервованного места по системе GPS в условиях спокойной ионосферы МОМ=5 м, заданная вероятность НБП Рзд=0,99 (допускаемое число чрезмерных сближений кораблей с НО nдп=10 на 1000 проходов кораблей мимо разных НО на рассчитанном безопасном расстоянии), односторонние коэффициенты предельного перехода КР1Г(0,99)=2,34, КР1Л(0,99)=3,1. Вычислим сначала безопасное расстояние по формуле (1):
Затем определим предельные погрешности места корабля, положения границ НО и графических построений на карте при законе распределения Лапласа:
и безопасное расстояние с учетом погрешности измерения дистанции: DБ2= Это в четыре раза больше, чем полученное по формуле (1). Линия пути корабля при плавании в тесной узкости для обеспечения навигационной безопасности с вероятностью 0,99 должна быть проложена на расстоянии DБ2–l =34 м от границы НО. Однако при расчетах по рекомендациям руководящих документов [3–5] корабль должен пройти всего лишь в DБ1=8,2 м, то есть в k=4,1 раза ближе, чем надлежит, или на нормированном расстоянии (применительно к закону Гаусса) DН=2,34/4,1=0,57, чему соответствуют реально обеспечиваемая вероятность Роб=0,716 и фактически возможное число касаний грунта nФ=284 (вместо допускаемых 10) на 1 000 проходов кораблей. Рассмотренные в примере расстояния, измеряемые 10–30 метрами, не выглядят угрожающе, а их разница компенсируется навигационным оборудованием гавани и бдительностью людей, участвующих в управлении кораблем. Но, во-первых, это никому не дает права решать задачи НБП заведомо неточно – лучше их вообще не решать. Во-вторых, навигационные аварийные происшествия с кораблями и судами в стесненных условиях плавания по-прежнему происходят. В-третьих, не так далеко время, когда для исключения влияния человеческого фактора основной станет автоматизированная проводка корабля при плавании в узкостях, и тогда верность расчетов показателей НБП станет решающим фактором. Кроме того, подобные расчеты для плавания подводных лодок с современным навигационным комплексом по карте с масштабом С=200 000 при Рзд=0,99 приводят к значениям Роб1=0,840 и nФ1=160. Это уже очень важный показатель, особенно с учетом стоящих задач длительного скрытного плавания подводных лодок в своих территориальных водах на небольших расстояниях от НО. Таким образом, пренебрежение погрешностями положения границ НО может привести к многократному (от 4,5 до 30 раз в зависимости от заданной вероятности) превышению количества случаев чрезмерного сближения кораблей с НО по сравнению с допускаемым числом. 5. Корректное решение задачи НБП состоит в том, что текущее или прогнозируемое расстояние D от точки корабля, из которой осуществляется управление его движением, до границы НО должно быть не менее суммы дистанций безопасной (DБ) и запаса (DЗР), то есть отвечать условию, предложен- ному в Методиках вероятностных расчетов при ре- шении навигационных задач на кораблях и судах ВМФ [6]. При этом безопасная дистанция определяется как произведение средней квадратической погрешности определения расстояния D (mD), коэффициента верхней доверительной границы для СКП при доверительной вероятности Рдв (Кh(Рдв)) и коэффициента предельного перехода от СКП к предельной погрешности для закона распределения Лапласа (КР1Л(Рзд)), являясь, таким образом, предельной погрешностью определения расстояния D ( Таким образом, формально условие, которому должно отвечать прогнозируемое расстояние D, записывается в следующем виде:
6. Современное кораблевождение имеет еще ряд ошибочных решений, занижающих СКП mМК и предельные погрешности На основании изложенного можно сделать следующие выводы. Способ расчета показателей НБП, реализованный в Мореходных таблицах МТ-2000 и в Инструкции по навигационному оборудованию ИНО-2000, устарел и содержит значительные методические ошибки, что при расчетах показателей НБП зачастую приводит к абсурдным результатам и может повлечь катастрофические последствия. Кроме того, использование Мореходных таблиц для расчетов показателей НБП должно осуществляться с осторожностью и учетом возможных неточностей (целесообразно увеличивать полученные данные в 2–4 раза). Вместо них необходимо разработать и издать новый документ, в котором адекватно решались бы проблемы навигационно-боевой безопасности плавания кораблей. Вскрытые в статье ошибки и упомянутые недостатки касаются и других основных задач кораблевождения (навигационно-тактических и стрельбовых) и значительно понижают эффективность навигационно-гидрографического обеспечения бо- евой и повседневной деятельности ВМФ. Кораблевождение остро нуждается в модернизации. На взгляд авторов, следует разработать и издать правила решения вероятностных задач кораблевождения, для освоения которых потребуется разработка комплексного учебника по методам решения вероятностных задач кораблевождения, охватывающего разделы нескольких учебных дисциплин, и алгоритмов для машинной реализации правил. Отметим, что в статье использовано несколько новых для кораблевождения терминов (эксцесс, квантиль, интервал корреляции погрешности, закон распределения Лапласа, доверительный интервал и др.). Обойтись без них в теории современного кораблевождения невозможно, поэтому перед кафедрами математики военно-морских вузов необходимо поставить задачу изучения или пояснения соответствующих величин. Литература 1. Юдович А.Б. Предупреждение навигационных аварий морских судов. М.: Транспорт, 1988. 224 с. 2. Инструкция по навигационному оборудованию (ИНО-2000). СПб: Изд-во ГУНиО, 2002. 218 с. 3. Емец К.А., Груздев Н.М., Михальский В.А. [и др.]. Мореходные таблицы МТ-2000. СПб: Изд-во ГУНиО МО РФ, 2002. 575 с. 4. Груздев Н.М. Безопасность плавания. СПб: Изд-во СПб ВМИ, 2002. 221 с. 5. Кондрашихин В.Т. Определение места судна. М.: Транспорт, 1989. 230 с. 6. Михальский В.А., Рябоконь В.А. Методики вероятностных расчетов при решении навигационных задач на кораблях и судах ВМФ. СПб: Изд-во ГУНиО, 1999. 218 с. 7. Вентцель Е.С. Теория вероятностей. М.: Наука, 1969. 576 с. 8. Михальский В.А., Смирнов М.Ю., Сперанский К.С. Об автоматическом обеспечении навигационной безопасности плавания // Приоритеты развития и инновации морской деятельности (НО-2011): тр. VII Рос. науч.-технич. конф. СПб: Изд-во ГНИНГИ, 2011. С. 116–122. | ||||||||||||||||||||||||
 , и коэффициента перехода от СКП к предельной погрешности для закона распределения Гаусса (Г) и заданной вероятности Рзд (КР1Г(Рзд)) по формуле
, и коэффициента перехода от СКП к предельной погрешности для закона распределения Гаусса (Г) и заданной вероятности Рзд (КР1Г(Рзд)) по формуле , (1)
, (1) ).
). mНП
mНП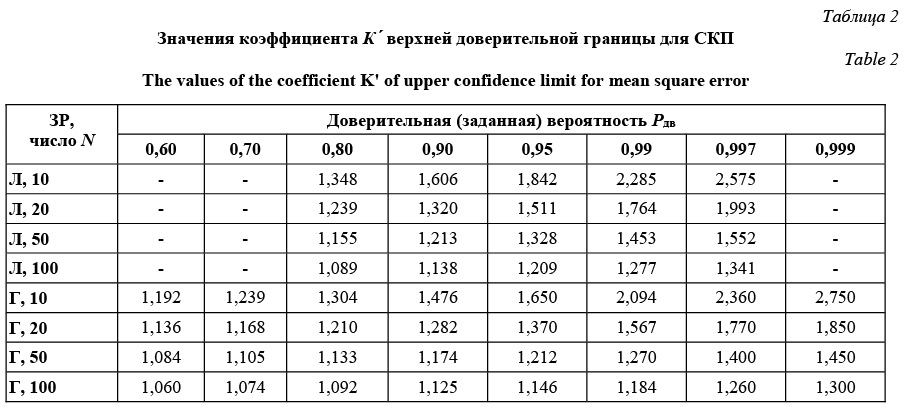
 , которая используется при решении большинства вероятностных навигационно-тактических и некоторых стрельбовых задач ВМФ (например, задачи обеспечения ракетных стрельб, задач противоминных действий и др.). Поэтому эти задачи будут решаться с такими же ошибками. Для примера на рисунке 2 показаны круги рассеивания точки применения оружия с радиусами r2 и r, соответствующими законам распре- деления погрешностей Лапласа и Гаусса. По- скольку в данном случае рассеивание происходит в двух плоскостях, число n´Ф выходов точки пуска за пределы заданного радиуса n´Ф>2nФ.
, которая используется при решении большинства вероятностных навигационно-тактических и некоторых стрельбовых задач ВМФ (например, задачи обеспечения ракетных стрельб, задач противоминных действий и др.). Поэтому эти задачи будут решаться с такими же ошибками. Для примера на рисунке 2 показаны круги рассеивания точки применения оружия с радиусами r2 и r, соответствующими законам распре- деления погрешностей Лапласа и Гаусса. По- скольку в данном случае рассеивание происходит в двух плоскостях, число n´Ф выходов точки пуска за пределы заданного радиуса n´Ф>2nФ.
 =КР1Л(Рзд)mD. Здесь mПО – СКП положения границ НО, подробно рассмотренная в [6], а для районов с круто уходящими в воду берегами равная mПО=mпл=С/1000, м, где mпл – плановая СКП, С – знаменатель экваториального масштаба карты (бумажной или электронной). Если прокладка ведется и расстояния измеряются на карте, то m2D=m2МК+m2ПО+m2гр, где mгр=С/2 000, м – СКП графических построений на карте.
=КР1Л(Рзд)mD. Здесь mПО – СКП положения границ НО, подробно рассмотренная в [6], а для районов с круто уходящими в воду берегами равная mПО=mпл=С/1000, м, где mпл – плановая СКП, С – знаменатель экваториального масштаба карты (бумажной или электронной). Если прокладка ведется и расстояния измеряются на карте, то m2D=m2МК+m2ПО+m2гр, где mгр=С/2 000, м – СКП графических построений на карте. =8,2 м.
=8,2 м. =11 м,
=11 м, =3,1
=3,1 10=31 м,
10=31 м, =1,7С/2000=8,5 м
=1,7С/2000=8,5 м =(112+312+8,52)0,5=34 м.
=(112+312+8,52)0,5=34 м. ;
;  ;
; . (2)
. (2) точечной оценки максимальной погрешности, проверка точности МСН на государственных испытаниях по не совсем корректным критериям и др.
точечной оценки максимальной погрешности, проверка точности МСН на государственных испытаниях по не совсем корректным критериям и др.| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4109&lang= |
Версия для печати Выпуск в формате PDF (8.31Мб) Скачать обложку в формате PDF (1.24Мб) |
| Статья опубликована в выпуске журнала № 1 за 2016 год. [ на стр. 51-55 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик: