Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Микроконтроллер для системы нечеткого регулирования в бездатчиковом вентильном электроприводе
Аннотация:В статье предлагается вариант реализации системы бездатчикового управления вентильным двигателем на базе аппарата нечеткой логики. Применение нечеткого регулятора в данном случае позволяет повысить устойчивость системы электропривода и улучшить качество регулирования. На основе результатов ряда экспериментов с моделью электропривода в среде Simulink сформирована база нечетких правил для коррекции момента коммутации фаз двигателя. В качестве входных параметров системы нечеткого регулирования используются нормированные значения частоты вращения и тока двигателя. На основе базы правил нечеткий регулятор производит коррекцию момента коммутации. Разработаны и подробно описаны структура и алгоритм работы предлагаемой системы управления на базе микроконтроллера. Предлагается код программы для микроконтроллера, реализующий разработанный алгоритм бездатчикового управления электроприводом. Произведен расчет минимально необходимой производительности микроконтроллера для построения разработанной системы управления. Анализ результатов расчета показывает, что для реализации предложенной системы управления подходит абсолютное большинство серийно выпускаемых промышленных микроконтроллеров. Таким образом, можно сделать вывод, что использование интеллектуализированных методов управления в бездатчиковом электроприводе при современном уровне развития вычислительной техники является более чем оправданным. Такой подход позволяет значительно улучшить качество регулирования, существенно не увеличивая при этом стоимость электропривода.
Abstract:The paper suggests an option to implement a control system for a BLDC sensorless drive using fuzzy logic. In this case, using a fuzzy logic controller makes the system more stable and increases the quality of motor control. After testing the system model in Simulink the authors created a base of fuzzy rules. Adjusting the drive phase switching moment is possible due to using the base of fuzzy rules. Fuzzy logic control system uses normalized values of current and a rate of rotation as input parameters. A fuzzy regulator adjusts the moment of commutation using the base of fuzzy rules. The paper describes the scheme and the algorithm of the proposed control system, which is based on a microcontroller. It also considers a program code for the microcontroller implementing the sensorless algorithm. The authors calculated minimal requirements for computational power of the microcontroller to create a control system. The analysis shows that almost any conventional industrial microcontroller is suitable for the proposed control system. As a result, it can be stated that using in-tellectual control methods in sensorless drive motors is reasonable due to the current level of computational devices' devel-opment. Such usage can significantly increase the quality of control while the cost of the whole system is almost the same.
| Авторы: Льготчиков В.В. (vvldrive@yandex.ru) - Смоленский филиал Национального исследовательского университета МЭИ (профессор), Смоленск, Россия, доктор технических наук, Горчаков Д.В. (gorden-90@yandex.ru) - Смоленский филиал Национального исследовательского университета МЭИ (аспирант), Смоленск, Россия | |
| Ключевые слова: моделирование, микроконтроллер, нечеткий регулятор, нечеткая логика, противо-эдс, бездатчиковое управление, электропривод |
|
| Keywords: modeling, microcontroller, fuzzy controller, fuzzy logic, back-emf, sensorless control, electric drive |
|
| Количество просмотров: 11855 |
Версия для печати Выпуск в формате PDF (8.31Мб) Скачать обложку в формате PDF (1.24Мб) |
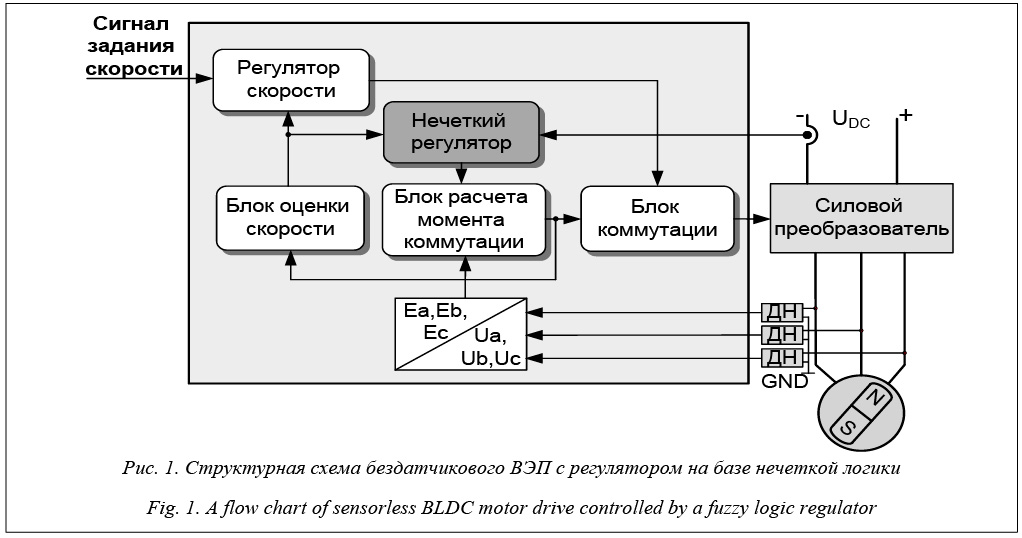
При бездатчиковом управлении вентильным электроприводом (ВЭП) особое внимание следует уделять качеству регулирования в динамических режимах, таких как приложение нагрузки или изменение сигнала задания скорости. При этом для поддержания устойчивой работы системы электроприводов (ЭП) необходимо компенсировать возрастание тока и насыщение магнитной цепи путем гибкого изменения параметров системы управления. Такая задача является трудноформализуемой. Для ее решения целесообразно применить метод, который позволит при неполной информации о положении ротора сформировать качественную траекторию движения привода в целом. Используем нечеткую логику [1–3] для коррекции момента коммутации.
Система управления включает в себя следующие элементы: - регулятор скорости (определяет скважность импульсов напряжения на выходе силового преобразователя); - блок оценки скорости (косвенно определяет частоту вращения ротора двигателя, анализируя последовательности импульсов управления силовым преобразователем); - блок расчета момента коммутации (реализует алгоритм определения времени включения очередной фазы двигателя по интегралу сигнала противо-ЭДС) [4]; - блок коммутации (формирует последовательность импульсов управления силовыми ключами); - блок определения противо-ЭДС (выполняет функцию расчета сигналов противо-ЭДС по измеряемым фазным напряжениям); - нечеткий регулятор (вводит в систему коррекцию момента коммутации в зависимости от частоты вращения ротора и величины тока двигателя). В качестве входных параметров системы нечеткого вывода выбраны две лингвистические переменные: нормированные значения частоты вращения и тока двигателя [5]. Выходной переменной является сигнал коррекции момента коммутации – нормированное значение по отношению к текущей продолжительности импульса управления. Так как в данной задаче имеем неопределенности типа «приблизительно равно», при задании функции принадлежности используем треугольную фор- му [6]. В качестве терм-множества входной переменной «частота вращения» используем терм-множество T1={«Низкая», «Средняя», «Высокая»}. В качестве терм-множества входной переменной «ток двигателя» используем терм-множество T2={«Низкий», «Средний», «Большой»}. В качестве терм-множества выходной переменной «коррекция момента коммутации» используем терм-множество T3={«Близкая к нулю», «Слабая», «Сильная», «Очень сильная»}. Так как выходную переменную в нашем случае удобнее задать нечеткими термами, в качестве схемы нечеткого вывода будем использовать алгоритм Мамдани [7], методом активации будет min. В качестве метода агрегирования использована операция min-конъюнкции. Для аккумуляции заключений правил использован метод mах-дизъюнкции, в качестве метода дефаззификации – метод центра тяжести. База нечетких правил для регулятора формируется исходя из условия, что сигнал коррекции должен увеличиваться с ростом момента сопротивления и уменьшаться с ростом частоты вращения ротора. При этом изменение тока двигателя влияет на уровень коррекции сильнее, чем изменение частоты вращения. Нечеткий регулятор был синтезирован в пакете Fuzzy Logic Toolbox [8] в соответствии с составленной базой нечетких правил. Затем он был интегрирован в систему управления бездатчиковым ВЭП в среде Simulink. В ходе моделирования исследовалась работа ЭП при задании сложных траекторий движения и приложении нагрузки. Результаты моделирования показали, что разработанный регулятор хорошо справляется с поставленной задачей, а предлагаемая система управления на базе нечеткой логики обеспечивает качественную работу привода в широком диапазоне частот вращения. Чтобы реализовать базу нечетких правил на микроконтроллере (МК), необходимо определить минимальные требования к его производительности и имеющимся аппаратным средствам. Минимальный набор аппаратных средств, необходимый для работы бездатчиковой системы управления, представлен в таблице. Распределение аппаратных средств МК Microcontroller’s hardware distribution
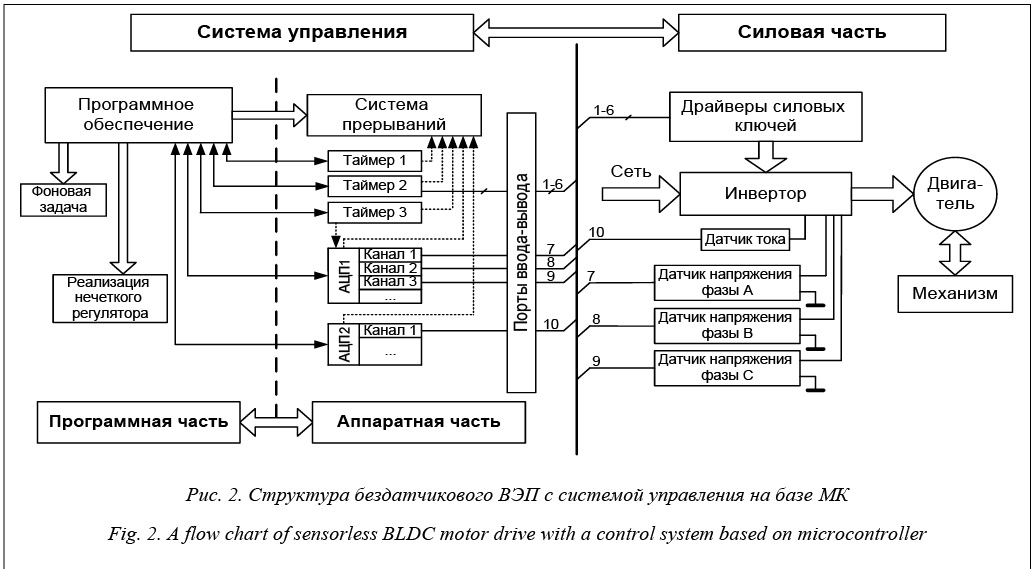
Таким образом, подходящий для решения поставленной задачи МК должен иметь не менее 4 каналов аналого-цифрового преобразователя (АЦП), 2 таймера общего назначения и не менее 10 свободных линий портов ввода-вывода. Остальные функции системы управления решаются программно.
Из структуры (рис. 2) видно, что значительная часть системы выполнена с использованием аппаратных средств МК. Это позволяет высвободить значительную часть ресурсов ядра МК для выполнения других задач (можно использовать МК с меньшей производительностью) и одновременно сократить число комплектующих системы, тем самым существенно снизив ее стоимость.
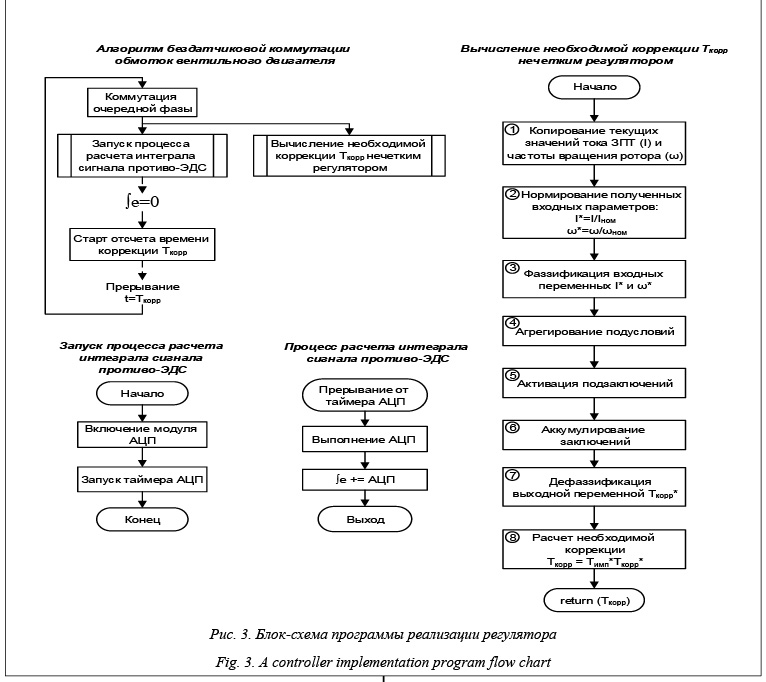
В соответствии с блок-схемой (рис. 3) на языке C реализован нечеткий регулятор. Однотипные фрагменты программы выполняются по шаблону и в тексте не приводятся. В комментариях указаны номера блоков в блок-схеме, соответствующие данной части программы. Абсолютное большинство современных промышленных МК имеет на борту несколько таймеров и модулей АЦП, поэтому основным ограничивающим фактором выступает тактовая частота МК. В связи с этим определим минимальные требования к производительности МК.
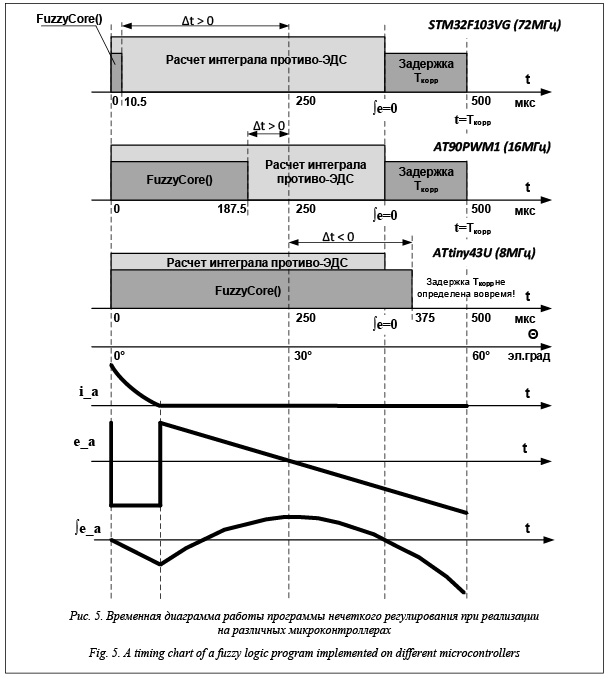
Исходя из условия, что коррекция нечеткого регулятора должна быть реализована на участке перемещения ротора не больше 30 эл.град, можно утверждать, что расчет значения на выходе регулятора должен выполняться не дольше, чем за время поворота ротора на 30 эл.град. Определим это время для двигателя с числом пар полюсов p=4 при частоте вращения n=5 000 (об./мин.). Время поворота ротора на 360 эл.град. и на 30 эл.град:
Теперь рассчитаем минимальную тактовую частоту для 32- и 8-разрядного МК:
Если тактовая частота МК будет ниже минимально допустимой, расчет выхода регулятора не успеет завершиться к моменту равенства нулю интеграла противо-ЭДС. Следовательно, угол открытия силового ключа не будет скорректирован. При этом эффективность работы ЭП существенно снижается.
Представленным требованиям соответствуют все современные 32-разрядные промышленные МК и большая часть 8-разрядных МК. Исключение составляют только чипы младших семейств (например, младшие линейки компаний Atmega (ATtiny) и Texas Instruments (MSP430F1x)). Таким образом, можно сделать вывод, что использование интеллектуализированных методов управления в бездатчиковом ЭП при современном уровне развития вычислительной техники является более чем оправданным. Подобный подход позво- ляет значительно улучшить качество регулирования, при этом существенно не увеличивая стоимость ЭП. Литература 1. Круглов В.В., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные нейронные сети. М.: Физматлит, 2001. 201 с. 2. Гончаров А.С., Поваляев В.А., Миронов С.М. Анализ современного состояния в области создания электроприводов с бездатчиковым управлением и методов построения САР в условиях ограниченной информации о векторе состояния // Электротехнические комплексы и системы управления. 2008. № 1. С. 13–16. 3. Козлов А.В., Тамер О.С. Основные направления создания электронных систем, использующих нечеткие управляющие алгоритмы // Вестн. Волжского ун-та им. В.Н. Татищева. № 17. 2011. С. 69–72. 4. Горчаков Д.В. Бездатчиковое управление вентильным двигателем с использованием сигнала противо-ЭДС // Фундаментальные и прикладные науки сегодня. 2013. Т. 1. С. 141–144. 5. Заде Л. Понятие лингвистической переменной и его применение к принятию приближенных решений. М.: Мир, 1976. 166 с. 6. Тэрано Т., Асаи К., Сугэно М. Прикладные нечеткие системы; [пер. с япон.]. М.: Мир, 1993. 368 с. 7. Новак В., Перфильева И., Мочкрож И. Математические принципы нечеткой логики; [пер. с англ.]. М.: Физматлит, 2006. 352 с. 8. Деменков Н.П. Нечеткое управление в технических системах: учеб. пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2005. 200 с. 9. STMicroelectronics. URL: www.st.com. (дата обращения: 10.09.2015). 10. Atmel. URL: www.atmel.com. (дата обращения: 10.09.2015). 11. Texas Instruments. URL: www.ti.com. (дата обращения: 10.09.2015). | ||||||||||||||||||||||

 ;
; .
. ;
; .
.
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4122 |
Версия для печати Выпуск в формате PDF (8.31Мб) Скачать обложку в формате PDF (1.24Мб) |
| Статья опубликована в выпуске журнала № 1 за 2016 год. [ на стр. 134-139 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Использование нечеткой логики в бездатчиковом вентильном электроприводе
- Моделирование и анализ программ многомерных интервально-логических регуляторов
- Применение алгоритмов нечеткой логики в системе управления диаграммообразующим устройством гибридной зеркальной антенны
- Адаптивные нечеткие системы по таксономии класса FOREL
- Модель выбора мероприятий по обеспечению информационной безопасности на основе нечетких автоматов
Назад, к списку статей