Journal influence
Bookmark
Next issue
Forest fire simulation using an agent-based model
Abstract:The article considers the task of modeling forest fire situation. To solve it the authors propose to use the agent-based approach with the geographic information systems (GIS) technology that allows combining the advantages of both. As a result, an agent-based model has been developed. This model allows predicting the spread of a forest fire edge and simulating the direct method of fighting grass-roots forest fires. Any portion of the real terrain maps can be used as an environment for agents. The proposed model uses two types of agents. Agents of the first type (A agents) are areas of fire front propagation and are used to model the behavior of forest fire. Taken together, they represent forest fire edge on a map. The model allows multiple edges, which independently spread in different parts of the map. Agents of the second type (B agents) are used for simulating firefighting actions and affect A agents. Based on this model the authors developed a software package for a wide range of tasks. First, the system is useful for determining the operational parameters of grass-roots forest fires spread and development of measures to prevent and fight it. Second, this system can serve as a basis for forest firefighting training systems for forestry workers and the Ministry of Emergency Situations as a part of advanced professional training, as well as for teaching students of universities and colleges.
Аннотация:В статье рассматривается задача моделирования лесопожарных ситуаций. Для ее решения предлагается использовать агентный подход совместно с технологией геоинформационных систем, что позволит объединить преимущества обоих направлений. Разработана мультиагентная модель, дающая возможность как прогнозировать распространение кромки лесного пожара, так и имитировать прямой метод тушения низового лесного пожара немеханизированными противопожарными отрядами. В качестве среды для агентов может быть выбран любой участок карты реальной местности. В предлагаемой модели используются два типа агентов. Агенты первого типа (A) представляют собой участки фронта распространения пожара и используются для моделирования поведения лесного пожара. В совокупности они представляют контур пожара на карте. Модель допускает наличие одновременно нескольких таких контуров, распространяющихся независимо друг от друга в различных частях карты. Агенты второго типа (B) имитируют действия противопожарных сил и оказывают воздействие на агентов первого типа. На основе предложенной модели был разработан программный комплекс, который предлагается использовать для решения широкого круга задач. Во-первых, система будет полезна для оперативного определения параметров распространения лесного низового пожара в лесных насаждениях, а также разработки комплекса мер по его предотвращению и по противодействию ему. Во-вторых, она может служить основой для учебно-тренажерных систем, предназначенных для обучения студентов вузов и техникумов лесохозяйственного профиля, работников лесохозяйственной отрасли и МЧС на курсах повышения квалификации в учебно-игровой форме основам тактики борьбы с лесными пожарами.
| Authors: Yarovoy S.V. (ach_bask@mail.ru) - Siberian State Technological University, Krasnoyarsk, Russia | |
| Keywords: wildfire, wildfire localization, simulation, geoinformation system, agent-based model, software package |
|
| Page views: 8635 |
Print version Full issue in PDF (6.81Mb) Download the cover in PDF (0.36Мб) |
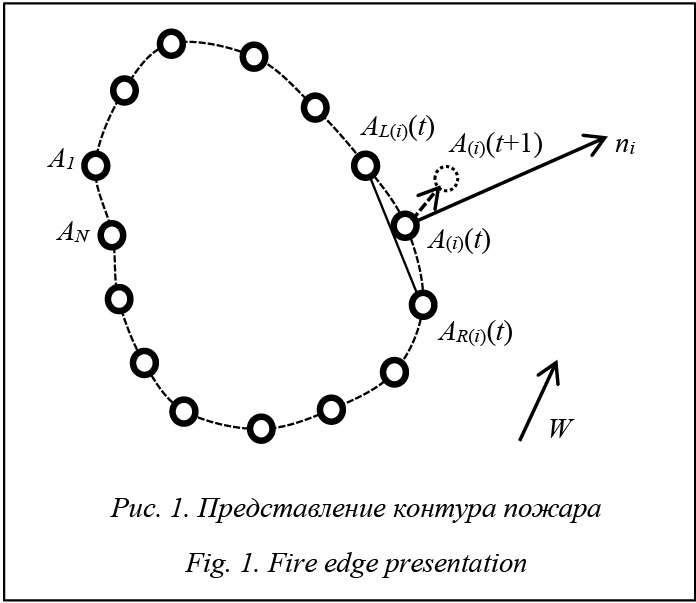
Природный пожар – неконтролируемый процесс горения, стихийно возникающий и распространяющийся в природной среде. Данный термин объединяет лесные, торфяные и степные пожары. Природные пожары наносят огромный экономический и экологический ущерб регионам, в которых они возникают. Для управления эффективной борьбой с природными пожарами разработано большое количество информационных систем, позволяющих с различной степенью точности моделировать их поведение (системы BehavePlus, FARSITE, WFDS [1–3] и др.). Данные системы основаны на математических моделях, имеющих различную точность, время расчета и требовательность к вычислительным ресурсам. Однако, помимо моделирования непосредственно самой кромки природного пожара, существует необходимость моделирования различного рода искусственных воздействий на пожар для его локализации и ликвидации. Подобные модели могут активно использоваться при управлении лесопожарной ситуацией, в частности, для решения задачи оптимального управления противопожарными силами и средствами. На практике выбор средств и методов для локализации природного пожара зависит от большого количества факторов, которые практически не поддаются формализации. В таких условиях на данный момент наиболее эффективным методом является агентное моделирование. Агентное моделирование (agent-based modeling, ABM) представляет собой новый подход к имита- ционному моделированию, который направлен на моделирование сложных динамических систем с помощью исследования поведения и взаимодействия автономных и независимых субъектов (агентов) в некоторой среде [4]. Агентные модели используются как в естественных науках (физике, биологии), так и в общественных (социологии, экономике). Наибольшее применение данный тип моделей получил в случаях, когда необходимо продемонстрировать работу системы, состоящей из большого числа взаимосвязанных субъектов (от десятков до нескольких тысяч), зависящих от влияния большого количества различных случайных воздействий. Для моделирования лесопожарных ситуаций особый интерес также представляют геоинформационные системы (ГИС), обладающие возможностями хранения и визуализации пространственной информации. Совместное использование агентного моделирования и ГИС позволяет объединить преимущества обоих направлений, применить перспективные средства для моделирования процессов, протекающих в условиях реального ландшафта. Идея моделирования кромки природного пожара с помощью агентного подхода не нова [5, 6]. Агентные модели такого рода создавались с помощью специализированных систем для програм- много описания деятельности агентов и состояния среды (агентных платформ), таких как NetLogo, StarLogo, Repast Simphony и др. Данный подход позволяет упростить программную реализацию имитационной модели, но значительно затрудняет ее интеграцию с ГИС. Кроме того, в работах [5, 6] моделирование свободно распространяющегося пожара производится без моделирования противопожарных сил и средств. Таким образом, существует необходимость создания имитационной системы на основе агентного подхода, позволяющей моделировать лесопожарные ситуации на реальной местности, включающие как моделирование пожара, так и процесс его ликвидации. Рассмотренная далее агентная модель ориентирована на имитацию прямого метода тушения низового лесного пожара немеханизированными противопожарными отрядами. Описание среды моделирования Среда моделирования представляет собой участок карты реальной местности с нанесенным на нее слоем, описывающим растительные горючие материалы (РГМ). Таким образом, имеется возможность совмещать данные ГИС и агентной модели. В модели используется информация о населенных пунктах, реках, озерах, дорогах, оврагах, лесных насаждениях и др. Позиционирование на карте производится заданием пространственных координат, различных для каждого объекта. В качестве модели горючего используется модель тонкого слоя [7]. В данной модели лесной покров рассматривался как однородный слой на поверхности земли с усредненными характеристиками РГМ, определяемыми на основании пирологического описания выделов карты лесов. Таким образом, для каждого местоположения на карте заранее задается тип поверхности, определяющий наличие основных проводников горения (ОПГ) и их тип. В зависимости от типа ОПГ определяются базовая скорость распространения кромки пожара VОПГ (м/мин.) и теплота воспламенения слоя Q (Дж/м2). В качестве основных показателей среды также принимаются следующие параметры: - величина скорости ветра по данным ближайшей метеостанции Vω; - вектор направления ветра W; - класс пожарной опасности. Данные параметры в значительной степени влияют на скорость и направление распространения пожара, а также на интенсивность горения. В модели выделены два типа агентов: участок фронта распространения пожара (агенты типа A) и противопожарная команда (агенты типа B). Агенты типа A используются для моделирования поведения лесного пожара и в совокупности представляют контур пожара на карте. Модель допускает наличие одновременно нескольких таких контуров, распространяющихся независимо друг от друга в различных частях карты. Агенты типа B имитируют действия противопо- жарных сил и оказывают воздействие на агентов типа A. Свойства и характеристики агентов типа A Агент, представляющий участок фронта распространения пожара, характеризуется следующими параметрами: - текущие пространственные координаты (X, Y); - вектор внешней нормали к контуру n = [nx, ny]T; - вектор скорости движения υ = [υx, υy]T; - значение интенсивности горения I; - значение уровня задымления M; - ссылки L и R на соседних агентов для создания единого контура; - текущее состояние горения onFire=[true, false]. Основная цель, которой агенты A руководствуются при исполнении, – перемещение по среде моделирования. Расчет пространственных координат данных агентов на каждом шаге моделирования осуществляется по заранее заданному закону. Также во время исполнения модели агенты A могут порождать новых агентов или погибать при определенных условиях. Область видимости агентов A ограничена расстоянием до соседних по контуру агентов за счет ссылок L и R. Расчет пространственных координат. Расчет новых координат AX, AY на каждой итерации моделирования выполняется посредством основанного на методе подвижных сеток (МПС) алгоритма [8, 9]. Согласно данному методу, расчетная сеточная область не задается заранее, а продвигается и развивается вместе с контуром пожара, представленным в виде набора точек: Ci(t)={xi(t), yi(t), pi(t), L(i), R(i)}, iÎN(t), где xi(t), yi(t) – координаты точки на плоскости; pi(t) – вектор внешней нормали к контуру; L(i) и R(i) – номера точек контура, расположенных, соответственно, слева и справа от Ci; N(t) – множество номеров агентов, образующих контур в момент t. Для расчета следующего состояния контура используются скорость распространения пожара υ0 и индикатриса нормальной скорости ξn(φ,ω). Приращение координат в точке Ci(t) производится по формулам: xi(t+Δt) = xi(t)+υ0·ξn(φi,ω)·Δt·cos(αi), yi(t+Δt) = yi(t)+υ0·ξn(φi,ω)·Δt·sin(αi), где φi – угол между нормалью к контуру в точке Ci(t) и направлением ветра ω; αi – угол между нормалью к контуру в точке Ci(t) и горизонтальной осью. Для использования данного алгоритма сопоставили каждую точку Ci(t) с агентами типа A в нашей модели. В качестве входных данных для алгоритма используются характеристики агентов (X, Y, n, υ, L, R), а также параметры среды, такие как скорость и направление ветра, класс пожарной опасности, тип ОПГ. Помимо расчета приращений координат для точек контура, алгоритм МПС предусматривает анализ пересечений и самопересечений контуров, а также упорядочение расстояний между соседними точками. Внедрение данных процессов в модель позволило эффективно управлять популяцией агентов A (добавлять и удалять агентов).
Помимо расчета параметров агента A, характеризующих его пространственное положение в среде, во время моделирования производится расчет интенсивности горения и уровня задымления вокруг агента. Значения данных параметров имеют решающее значение при взаимодействии с агентами B. Расчет интенсивности горения РГМ. Согласно [10], интенсивность I рассчитывается по формуле I = Q·υi·ρbe, где υi – значение скорости распространения пламени, м/мин.; ρbe – эффективная плотность горючего, кг/м3, то есть количество горючего материала (из общего запаса, содержащегося в слое), которое участвует в воспламенении; Q – теплота воспламенения (количество тепла, необходимое для доведения единицы веса горючего материала до воспламенения), Дж/кг. Поскольку в предлагаемой модели используется модель тонкого слоя горючего, была использована эмпирическая формула, в которой в качестве Q используется теплота сгорания слоя, МДж/м2 [11]. Таким образом, интенсивность горения агента Ai, на которого не оказывается воздействие агентом B, при моделировании рассчитывается следующим образом: Ii = (Q·υi + IR(i) + IL(i))/3, где Ii – интенсивность горения агента Ai; Q – поверхностная теплота сгорания слоя; υi – значение скорости движения агента Ai; IR(i) – интенсивность горения агента AR(i); IL(i) – интенсивность горения агента AL(i). То есть при расчете интенсивности горения текущего агента Ai учитывается аналогичный показатель соседних агентов. Также на каждом шаге моделирования показатель интенсивности Ii может быть изменен случайным образом в положительную или отрицательную сторону с вероятностью Pnf. Это необходимо для имитации неоднородности таксационных выделов, ошибок в определении типов леса и других факторов, которые могут служить причиной ошибок прогноза [11]. Расчет задымленности. Задымление является одним из отрицательных факторов, увеличивающих ущерб от лесного пожара, а также значительно затрудняющих борьбу с ним. В настоящее время существует большое количество работ, посвященных моделированию дымового шлейфа [12, 13], однако реализация этих моделей требует высоких вычислительных затрат, а сами модели избыточны для данного исследования. Таким образом, была выбрана концепция локального пламени [8]. Согласно данной концепции, несколько огрубляя физическую картину распространения дымового облака, принимается, что каждое локальное пламя (в нашем случае каждый агент типа A) порождает локальный дымовой поток, конфигурацию которого в приземном слое можно определить следующим образом: λs(x, y, t, φω) = υs0(x, y, ω)·(t – t0)·χs(ω, φω – φ), где (x, y) – координаты точки в области активного горения; φω – направление ветра, рад; φ – текущий угол, рад, 0 ≤ φ ≤ 2π; t – текущее время, сек., t0 ≤ t ≤ t0+r; t0 – время воспламенения горючего в точке (x, y), сек.; r – продолжительность горения горючего в точке (x, y); χs(ω, φω – φ) – индикатриса локального дымового потока, определяющая его форму; υs0 – горизонтальная скорость распространения дымового облака в приземном слое. Согласно [13], υs0 вычисляется с помощью выражения υs0 = 0,28 + 0,607w – 0,0217w2, где w – скорость ветра над пологом леса, м/с. В предлагаемой модели на каждом шаге моделирования агенты типа A перемещаются в новую точку пространства, поэтому r всегда будет равна времени, эквивалентному одному шагу модели- рования (при реализации модели использовался шаг = 5 мин.). Сам уровень задымления M непосредственно около агента A принят в виде безразмерной величины, зависящей от интенсивности горения I, и может принимать значение от 0 (при I = 0) до 1 (при I → max).
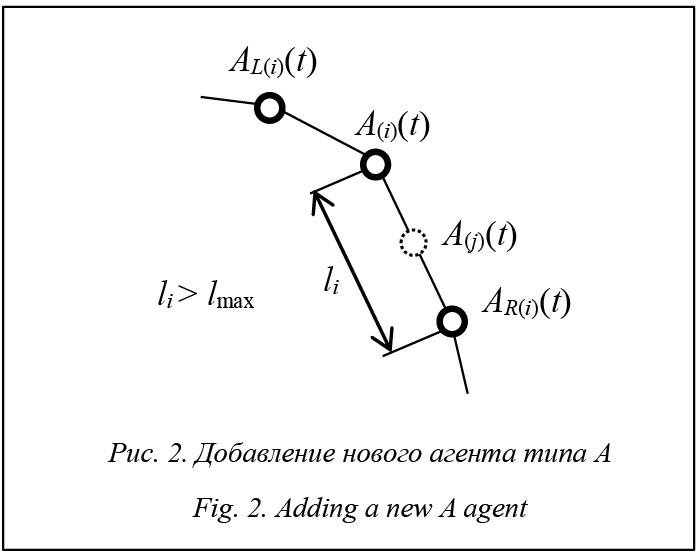
Значение lmax является определяющим для точности расчета контура в обратно-пропорциональной зависимости. Однако слишком малое значение lmax приведет к порождению большого числа агентов, что значительно увеличит требования к вычислительной мощности при моделировании. При внешней границе карты ≈10 км автором рекомендуется устанавливать значения lmax ≈ 10 м. Удаление агентов в процессе моделирования. Удаление (гибель) агентов типа A производится в двух случаях. Во-первых, удаление агентов происходит, если расчетное расстояние l(i) между агентами Ai(t) и AR(i)(t) меньше заданного значения lmin. В этом случае агент Ai(t) удаляется, а ссылки R и L у агентов AR(i) и AL(i) корректируются следующим образом: R(L(i))=R(i), L(R(i))=L(i). Во-вторых, агенты удаляются при осуществлении обрезки контура, которую необходимо произвести при самопересечении или взаимном пересечении двух контуров пожаров. Для этого на каждой итерации в процессе моделирования производится анализ пересечений и самопересечений контуров. Во время данного анализа вычисляются точки пересечения каждого из отрезков контура, образуемых агентами Ai и AR(i), со всеми остальными отрезками Ai и AR(i). Пересечение контуров, в том числе и самопересечение, имеет место, если для некоторой пары отрезков Ai, AR(i) и Aj, AR(j) (i ≠ j, i ≠ R(j), j ≠ R(i)) точка их пересечения ξ лежит внутри каждого из них. В этом случае изменяются ссылки у агентов Ai и AR(j): R(i)=R(j), L(R(j))=i. Агенты, оказавшиеся внутри области получившегося контура, удаляются. Переход состояний агента. Как уже было указано, для агентов A возможны два состояния, характеризующие текущее горение. Обозначим эти состояния как onF (агент «горит») и notF (агент «не горит»). Переход агента из состояния onF в notF возможен в нескольких случаях. Во-первых, агент может самостоятельно перейти в notF, когда попадает в область, в которой отсутствуют ОПГ. Во-вторых, он может быть «потушен» агентами типа B, оказывающими на них воздействие, снижающее интенсивность горения I. Переход агента из состояния notF в onF в данной модели не предусмотрен: если агент однажды перешел в состояние notF, он продолжает в нем находиться до конца процесса моделирования. Таким образом, можно сформулировать два простых правила перехода состояния для агентов типа A. Правило агента A № 1. Если VОПГ = 0, переходи в состояние notF («не горит») и прекращай движение по среде, иначе – продолжай движение. Правило агента A № 2. Если I = 0, переходи в состояние notF («не горит») и прекращай движение по среде, иначе – продолжай движение. Исходя из данных правил, получим таблицу переходов состояний агентов типа A (см. таблицу). Переходы состояний агентов типа A State transitions of A agents
Свойства и характеристики агентов типа B Агент, моделирующий противопожарную команду, характеризуется следующими параметрами: - текущие пространственные координаты (X, Y); - значение скорости движения по местности υ; - направление обхода контура пожара α = [R, L]; - значение скорости тушения кромки пожара VT (мера воздействия агента B на интенсивность горения I агента A); - номер fc ближайшего по расстоянию агента типа A; - значение психологического состояния P; - текущее состояние борьбы с пожаром inFight [true, false]. При исполнении агенты типа B руководствуются только одной целью – «потушить» все очаги возгорания. Для этого агент B перемещается по среде к ближайшему агенту Ai и воздействует на его показатель интенсивности горения I. Как только данный показатель становится равным 0, агент Ai меняет свое состояние на «не горит», а агент B перемещается к следующему агенту AR(i). Перед запуском модели выбирается количество агентов типа B, затем задаются характеристики каждого агента (υ, α, VT, P). Начальное расположение агентов на карте также задается заранее в зависимости от выбранной тактики тушения низового лесного пожара (схемы организации тушения). Схем тушения может быть четыре [14, 15]: - по всему периметру (для слабых по интенсивности пожаров); - охватом с фронта (для слабого и среднего по интенсивности лесного пожара); - охватом с фланга (для пожаров средней интенсивности); - сведением на клин (для сильного лесного пожара). Область видимости агентов B ограничена только самой средой моделирования. Где бы ни находился данный агент на карте, он всегда будет передвигаться в сторону ближайшего очага пожара (агента A). В процессе моделирования расчет новых координат BX, BY производится различными способами в зависимости от текущего состояния борьбы с пожаром. Если inFight = true, то по мере «тушения» в качестве координат X, Y агента B принимаются текущие координаты агентов A. Если inFight = false, производится расчет расстояния Sji от текущего агента Bj до каждого агента Ai. Затем выбирается наименьшее из этих расстояний и производится перезапись Bfc=i. Высчитывается нормаль направления движения N от Bj до Ai. Сами координаты BX, BY рассчитываются следующим образом: BX(t+1)= BX(t)+NX ·υ, BY(t+1)= BX(t)+NY ·υ. Добавление новых агентов в процессе моделирования. Автоматическое добавление новых агентов типа B в процессе моделирования не предусмотрено. Однако возможно добавление новых агентов вручную, если этого требуют цели и задачи исследования. Удаление агентов в процессе моделирования. Удаление агентов типа B производится только в случае «гибели» противопожарной команды, которая может произойти в процессе «тушения» агентов A. Взаимодействие агентов типа A и B. Рассмотрим более подробно взаимодействие агентов A и B, имитирующее процесс тушения участка кромки пожара противопожарной командой. Если агент B справится со своей задачей, то агент A перейдет в состояние notF («не горит»). В противном случае агент B будет удален. Процесс тушения участка кромки может продолжаться одну или более итераций в процессе моделирования, а успех агента B напрямую зависит от показателей VT и P. Скорость тушения кромки пожара VT определяется перед моделированием с учетом профессиональной подготовки, физического состояния, оснащенности и количества пожарных в команде. При тушении пожара эффективность труда во многом зависит также от психологического состояния пожарных P, которое обусловлено большим числом факторов, таких как напряженность работ, задымленность, высокая температура и др. [15]. Данный показатель может иметь значение от 0 до 1. Если тушение одного и того же агента A занимает большое количество итераций моделирования, происходит значительное снижение психологического состояния пожарных P. На данный показатель влияет также показатель задымления M агента A. При высокой задымленности психологическое состояние P снижается значительно быстрее. Если данный показатель достигает 0, считается, что пожарная команда уже не в силах потушить данный участок кромки и агент погибает. В случае успеха P значительно увеличивается и пожарная команда может приступить к тушению следующего участка. Помимо рассмотренных факторов, на работоспособность влияет и большое количество факторов вероятностного характера. Обозначим совокупность этих факторов как F. Они могут как снизить работоспособность (характер растительности, состояние погоды, неуверенные действия руководителя), так и повысить ее (кратковременный отдых, смена режима работы, уверенные действия руководителя). Значение F рассчитывается случайно в заданных пределах и напрямую увеличивает или уменьшает показатель P. Таким образом, интенсивность горения агента Ai, находящегося под воздействием агента Bj, рассчитывается по формуле Ii(t+1) = Ii(t)–(VTj · Pj), где Ii(t+1) – интенсивность горения агента Ai в период времени t+1; Ii(t) – интенсивность горения агента Ai в период времени t; VTj – скорость тушения кромки пожара агентом Bj; Pj – психологическое состояние пожарных агента Bj. Переход состояний агента. Для агентов B возможны два состояния, характеризующие текущее состояние борьбы с пожаром. Обозначим эти состояния как fight (агент «тушит кромку») и move (агент «перемещается по карте»). Переход агента из состояния move в fight возникает, когда пространственное расстояние от агента B до агента Afc равно нулю, то есть противопожарная команда достигла кромки пожара. Обратный переход возможен, если все агенты текущего контура пожара потушены и одновременно с этим на карте есть другой или другие непотушенные контуры. Таким образом, сформулируем два простых правила перехода состояния для агентов типа B. Правило агента B № 1: если твое состояние move и расстояние от агента B до агента Afc рав- но 0, переходи в состояние fight и начинай взаимодействие с агентом Afc, иначе – продолжай движение. Правило агента B № 2: если твое состояние fight и количество непотушенных агентов A в контуре равно 0, то переходи в состояние move и двигайся к ближайшему горящему агенту A, иначе – продолжай борьбу. Реализация агентной модели На основе предложенной мультиагентной модели автором был разработан программный комплекс, имеющий клиент-серверную архитектуру и веб-интерфейс. На сервере находится БД, в которой хранится информация о среде моделирования (реальной местности). Программный код серверной части реализован на языке PHP. Клиентская часть системы реализована на JavaScript (JS) с использованием библиотеки с открытым исходным кодом OpenLayers. Данная библиотека предназначена для создания карт на основе программного интерфейса (API) и позволяет создать web-интерфейс для отображения картографических материалов. Библиотека может работать с данными различных картографических сервисов, таких как OpenStreetMap, Google, Yandex и др. Представим два примера работы созданной системы. Пример № 1. Параметры среды, выставленные перед началом моделирования: - тип ОПГ – лишайниковый; - класс пожарной опасности – 2; - скорость ветра под пологом леса – 1 м/с (Ю/З).
Как видно из представленного примера, после 4 часов локализации пожар продолжает развиваться и потушено менее 50 % текущей кромки пожара. Одновременно с этим общая длина горящей кромки пожара на 4-м часе тушения приблизительно равна длине исходной кромки пожара, что говорит о том, что 3 отряда пожарных по 6 человек не способны справиться с данным пожаром. Пример № 2. Параметры среды, выставленные перед началом моделирования: - тип ОПГ – лишайниковый; - класс пожарной опасности – 3; - скорость ветра – 1,5 м/с (С/В).
В результате проведенного исследования автором была разработана мультиагентная модель для имитации прямого метода тушения низового лесного пожара немеханизированными противопожарными отрядами. На основе данной модели создан программный комплекс, который предлагается использовать для широкого круга задач. Во-первых, система будет полезна для оперативного определения параметров распространения лесного низового пожара в лесных насаждениях, а также разработки комплекса мер по его предотвращению и противодействию ему. Во-вторых, она может служить основой для учебно-тренажерных систем, предназначенных для обучения студентов вузов и техникумов лесохозяйственного профиля, работников лесохозяйственной отрасли и МЧС на курсах повышения квалификации основам тактики борьбы с лесными пожарами. Литература 1. Andrews P.L., Bevins C.D., Seli R.C. BehavePlus fire modeling system, version 2.0: User's Guide. USDA Forest Service Gen. Techn. Rep. RMRS-GTR-106WWW. Ogden, 2003, 45 p. 2. Finney M.A. FARSITE: Fire are simulator model, development and evaluation. USDA Forest Service, Res. Paper RMRS-RP-4. Ogden, 1998, 47 p. 3. Mell W., Jenkins M.A., Gould J., Cheney Ph. A physics-based approach to modeling grassland fires. Intern. Journ. of Wildland Fire. 2007, vol. 16, pp. 1–22. 4. Аксенов К.А., Гончарова Н.В. Динамическое моделирование мультиагентных процессов преобразования ресурсов. Екатеринбург: Изд-во УГТУ-УПИ, 2006. 311 с. 5. Кухта В.Б. Метод моделирования распространения низового пожара в лесных насаждениях с использованием агентного подхода // Вестн. Московского гос. ун-та леса – Лесной вестник. 2014. № 5. С. 92–97. 6. Dai D., Zhang Y. Simulating fire spread in a community using an agent-based model. Proc. 12th Intern. Conf. on GeoComputation. Wuhan, China, LIESMARS Wuhan Univ., 2013, pp. 130–132. 7. Shatalov P.S., Dorrer G.A. Parallel computation of forest fire and its interaction with infrastructure objects. Proc. 4th Fire Behave and Fuels Conf., St. Petersburg, 2013, p. 3. 8. Доррер Г.А. Динамика лесных пожаров. Новосибирск: Изд-во СО РАН, 2008. 404 с. 9. Годунов С.К., Прокопов Г.П. Об использовании подвижных сеток в газодинамических расчетах // Журн. вычислит. матем. и математ. физики. 1972. Т. 12. № 2. С. 429–439. 10. Rothermel R.C. A mathematical model for fire spread predictions in wildland fuels. USDA Forest Service Research Paper INT-115, Ogden, 1972, 40 p. 11. Волокитина А.В. Защита населенных пунктов от чрезвычайных ситуаций, связанных с природными пожарами (практич. рекоменд.). Красноярск: Изд-во СО РАН, 2002. 63 с. 12. Brown D.F., Dunn W.E., Lazaro M.A., Policastro A.J. The smoke-fireplume model: tool for eventual application to prescribed burns and wildland fires. Joint Fire Sc. Program Conf. and Workshop, Boise, 1999, 12 p. 13. Мальбахов В.М., Шлычков В.А., Лежнин А.А., Дубровская О.А. Численная модель распространения дымового шлейфа при лесных пожарах с параметрическим учетом процессов горения // География и природные ресурсы. Спец. вып., 2004. С. 170–174. 14. Иванов В.А., Иванова Г.А., Москальченко С.А. Справочник по тушению природных пожаров. Красноярск: Изд-во ПРООН/МКИ, 2011. 130 с. 15. Щетинский Е.А. Тушение лесных пожаров: пособие для лесных пожарных. М.: Изд-во ВНИИЛМ, 2002. 104 с. |


| Permanent link: http://swsys.ru/index.php?page=article&id=4185&lang=en |
Print version Full issue in PDF (6.81Mb) Download the cover in PDF (0.36Мб) |
| The article was published in issue no. № 3, 2016 [ pp. 101-108 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Агентный подход при моделировании динамики изменения состояния парка радиотехнических систем специального назначения
- Применение информационных технологий при многоуровневой подготовке специалистов химико-технологического профиля
- Особенности создания пользовательского классификатора для отображения обстановки на электронной карте
- Имитационное моделирование противоборства в воздушно-космической сфере
- Программное средство для имитационного моделирования с помощью графовых моделей
Back to the list of articles