Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Системы автоматического управления объектами с запаздыванием: робастность, быстродействие, синтез
Аннотация:Рассматривается задача синтеза систем автоматического управления объектами с запаздыванием. Особенность ее постановки связана с формированием и решением уравнения синтеза численным методом без аппроксимации передаточной функции звена запаздывания. Этим создаются потенциальные возможности для повышения точности синтеза регуляторов. В работе они раскрываются за счет привлечения численного подхода к синтезу регуляторов – вещественного интерполяционного метода. Метод позволяет найти стабилизирующий регулятор по модели желаемой системы автоматического управления, известному неаппроксимированному математическому описанию объекта управления и принятой структуре регулятора. Вторая особенность задачи также связана с принятым методом и звеном запаздывания и реализуется на этапе получения желаемой модели. Для усиления демонстрационных возможностей и наглядности подхода в работе использован минимальный набор показателей – перерегулирование и время установления переходного процесса. Модель желаемой системы совместно с неаппроксимированным описанием объекта управления и принятой структурой регулятора позволили сформировать более точное уравнение синтеза по сравнению с традиционным подходом, основанным на приближении модели звена запаздывания дробно-рациональным выражением. Рассмотрены численный способ решения уравнения синтеза, а также исследование процедуры синтеза и свойств робастности систем с запаздыванием. На этой основе предложен алгоритм достижения максимального быстродействия систем автоматического управления с запаздыванием в условиях поддержания перерегулирования в заданных пределах и показан механизм ухудшения робастности синтезированной системы при увеличении запаздывания сигнала в объекте управления даже в условиях подстройки параметров регулятора под изменяющееся время запаздывания.
Abstract:The article considers synthesis of time delay automatic control systems (ACS). A synthesis statement is connected to equation solving by a numerical technique without approximation of a time delay element. This issue has a potential to improve synthesis accuracy of regulators. A real interpolation method (RIM) has number of advantages in synthesis of time delay ACS. RIM allows finding a regulator that compensates time delay using a targeted model, a defined non-approximated mathematical model of object and a regulator structure. Moreover, RIM allows building transfer function with direct quality factors on the stage of developing a targeted model. It’s simpler and more useful for a developer. The article demonstrates potentials of the method using minimal quantity of factors: overshoot and settings time. The targeted model with a defined non-approximated mathematical model and a regulator structure allows building accurate synthesis equation, which is useful for numerical research of synthesis and robust properties of time delay systems. The article proposes an algorithm of a maximal control rate for a time delay system in terms of specified overshoot. It also shows a negative effect of increasing time delay to robustness of the system. A result is graphically illustrated and proved by a number of examples.
| Авторы: Тхан В.З. (dungvietthan@gmail.com) - Национальный исследовательский Томский политехнический университет (аспирант), Томск, Россия, Берчук Д.Ю. (berchukdy@gmail.com) - Национальный исследовательский Томский политехнический университет (аспирант), Томск, Россия | |
| Ключевые слова: синтез систем управления с запаздыванием, робастность, быстродействие |
|
| Keywords: synthesis of time delay control systems, robustness, speed |
|
| Количество просмотров: 10547 |
Статья в формате PDF Выпуск в формате PDF (16.33Мб) Скачать обложку в формате PDF (0.33Мб) |
Системы автоматического управления (САУ) объектами с запаздыванием составляют обширный и важный для практики класс динамических систем. Расчет таких систем имеет специфические особенности в силу двух обстоятельств. Во-первых, это физические особенности, когда реакция объекта задерживается на время t относительно момента подачи сигнала на вход объекта. Во-вторых, это же явление вносит свои особенности в расчетные процедуры САУ из-за наличия в их математическом описании трансцендентной составляющей e –pt, отражающей существование запаздывания t. С позиций синтеза систем с запаздыванием обе особенности учитываются при построении регуляторов на основе популярного предиктора Смита [1]. Подход эффективен, но имеет свои ограничения [2, 3]. В частности, в условиях переменного запаздывания система управления может значительно изменять свои свойства вплоть до потери устойчивости. К этому можно добавить, что параметры дробно-рациональной части объекта прак- тически всегда также изменяются с течением времени, что ухудшает качество управления. В настоящей работе делается попытка поиска средств, позволяющих раскрывать робастные свойства САУ с запаздыванием на этапе синтеза регулятора и представлять их в наглядной форме. Аналитическое решение такой задачи, очевидно, не-возможно из-за трудностей действий с функций e –pt, входящей в модель САУ. По этой причине в работе используется один из численных методов, позволяющих оперировать описаниями САУ с запаздыванием. Выбор численного метода расчета систем с запаздыванием При решении задач автоматического управления основным математическим аппаратом является преобразование Лапласа, которое позволяет заменить операции в области времени более простыми действиями в области изображений. Получение таких изображений осуществляется по формуле прямого преобразования
Она удобна для аналитических преобразований, однако переход к численным действиям в общем случае затруднителен из-за вычислительных сложностей. Поэтому привлекают частные случаи преобразования (1), вытекающие из двух возможных трансформаций комплексной переменной p=d+jw. Первый вариант определяется условием d=0, при котором комплексная переменная вырождается в чисто мнимую p=jw. Получаемые изображения F(jw) соответствуют частотному методу на основе преобразования Фурье, они легко преобразуются в численные модели вида F(jwi), i=1, 2, ... [4]. Второй вариант вытекает из преобразования (1) при условии w=0, когда комплексная переменная вырождается в вещественную p=d [5, 6]. Получаемые функции-изображения
являются вещественными функциями вещественной переменной, что важно с позиций объема вычислений и практических задач управления. Функции F(d) позволяют достаточно просто перейти к дискретным представлениям F(di), i=1, 2, ..., h, привлечь для действий над ними хорошо разработанные численные методы. В отношении САУ с запаздыванием, которые являются предметом рассмотрения в настоящей работе, отметим: модели вида F(di), i=1, 2, ..., h, встречают существенно меньшие трудности при их преобразовании по сравнению с аналитическом подходом, так как действия осуществляются в вещественной арифметике – над числами e –dit, i=1, 2, ..., h. В формуле вещественного преобразования (2) предусмотрено ограничение переменной d снизу величиной C³0, что обеспечивает сходимость интеграла для широкого класса функций-оригиналов f(t), охватывающих практически все важные виды сигналов динамических систем. Синтез регуляторов САУ с запаздыванием численным методом Выбранный численный метод позволяет находить регуляторы автоматических систем, управляющих так называемыми особыми объектами, в том числе с запаздыванием, с распределенными параметрами [5, 6]. Воспользуемся такой возможностью для рассмотрения быстродействия САУ с запаздыванием и их робастных свойств. С этой целью рассмотрим конкретные задачи, в рамках которых можно выполнять численные расчеты, анализировать результаты и делать обобщающие выводы.
Система содержит регулятор, объект управления и цепь обратной связи. Для объекта [8] элементы САУ представлены описаниями
По технологии требуется поддерживать перерегулирование s в заданных пределах: sз – Ds £ s £ sз + Ds. (3) Обозначения sз, Ds, s в (3) соответствуют заданному значению перерегулирования sз =5 %, достигнутой величине s и допустимому отклонению Ds =½sз – s½, Ds = ±1 %. Еще одно требование – время установления переходного процесса должно быть минимальным:
В этих условиях требуется синтезировать регулятор, не прибегая к аппроксимации звена запаздывания, рассмотреть робастные свойства системы, а также выяснить зависимость этих свойств от величины запаздывания. Для решения задачи составим уравнение синтеза
В правой части уравнения синтеза содержится модель объекта управления, которая известна, и передаточная функция регулятора, вид которой выбран на основе априорных данных:
Для упрощения уравнения синтеза, сопоставляющего желаемую и синтезируемую системы в за- мкнутом состоянии, перейдем к равносильному уравнению В результате получаем расчетное соотношение изображений по Лапласу:
Дальнейшие шаги могут быть сделаны в рамках известных инженерных методов. Они связаны с заменой передаточной функции звена запаздывания на дробно-рациональное выражение, адаптированное к классическим методам. Другой вариант – использование принятого численного метода. В последнем случае появляется возможность исключения аппроксимации звена запаздывания, что позволяет надеяться на повышение точности решения уравнения. Для его реализации перейдем в уравнении (5) к вещественным изображениям. Такой переход для устойчивых звеньев и систем можно сделать формально заменой переменных: p®d [6]. Очевидно, что все полюсы функций в соотношении (5) расположены в левой полуплоскости, так что можно воспользоваться формальным приемом, что приводит к форме
Для численного решения уравнения (6) заменим входящие в него функции их численными представлениями вида F(di), i=1, 2, 3, в соответствии с рекомендациями [6]. В результате получим систему линейных алгебраических уравнений (СЛАУ):
При формировании СЛАУ для упрощения задачи узлы интерполирования приняты равномерными: di = id1, i=1, 2, 3. В этом случае первый узел d1 можно использовать в качестве инструментальной переменной, что позволяет из множества решений выбрать такое, которое в наибольшей степени отвечает предъявляемым требованиям, в частности по критерию (3). По итогам принятых уточнений констатируем: имеются заданное значение перерегулирования sз, условие (4) и два переменных параметра – Быстродействие САУ с запаздыванием Быстродействие создаваемой системы при прочих равных условиях будет зависеть от желаемого времени установления переходного процесса, задаваемого при формировании эталонной передаточной функции. На рисунке 2 приведены результаты синтеза регуляторов для нескольких значений
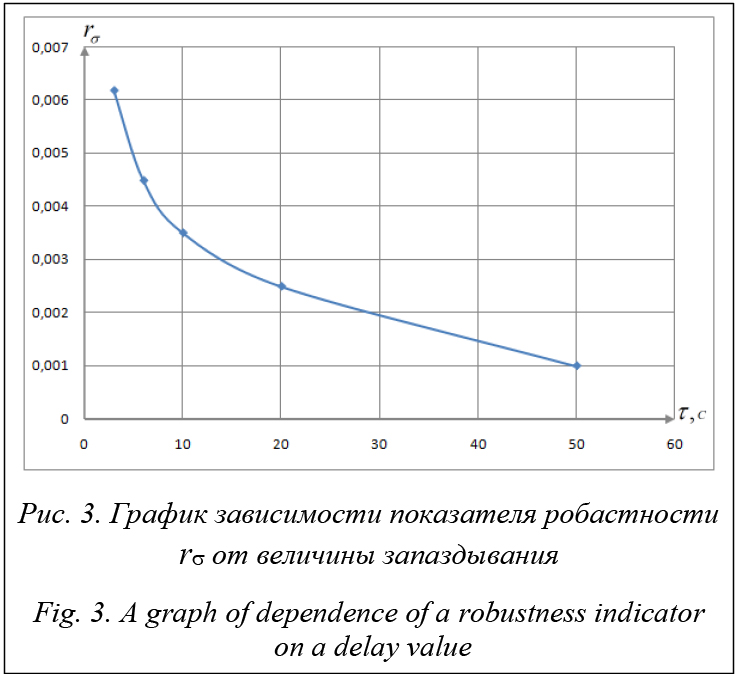
Обратим внимание на важную для практики возможность синтезировать регуляторы, которые ограничивают перерегулирование не только сверху, как это обычно бывает, но и снизу. Подчеркнем, что речь идет не о простейших САУ, а о системах с запаздыванием. Робастность САУ с запаздыванием Робастное свойство САУ многогранно, поэтому обычно ограничиваются какими-либо конкретными показателями системы. В данном случае за такой показатель вновь примем перерегулирование в силу его обобщающих свойств по отношению к показателям устойчивости и качества САУ. В [10] показано, что при определенных условиях изменение величины d1 приближенно соответствует изменению значений физических параметров САУ и, следовательно, коэффициентов ее передаточной функции. Это позволяет оценивать робастность системы по функции s=f(d1) – величине той ее части, которая удовлетворяет условию (3). Для расчетов и сравнительного анализа вариантов используют количественную оценку робастности, которая определяется максимальной величиной интервала [d1min, d1max], внутри которого выполняется условие (3). Обозначим такую оценку как rs= d2min – d1max, (8) указывая индексом s на отношение показателя робастности к перерегулированию.
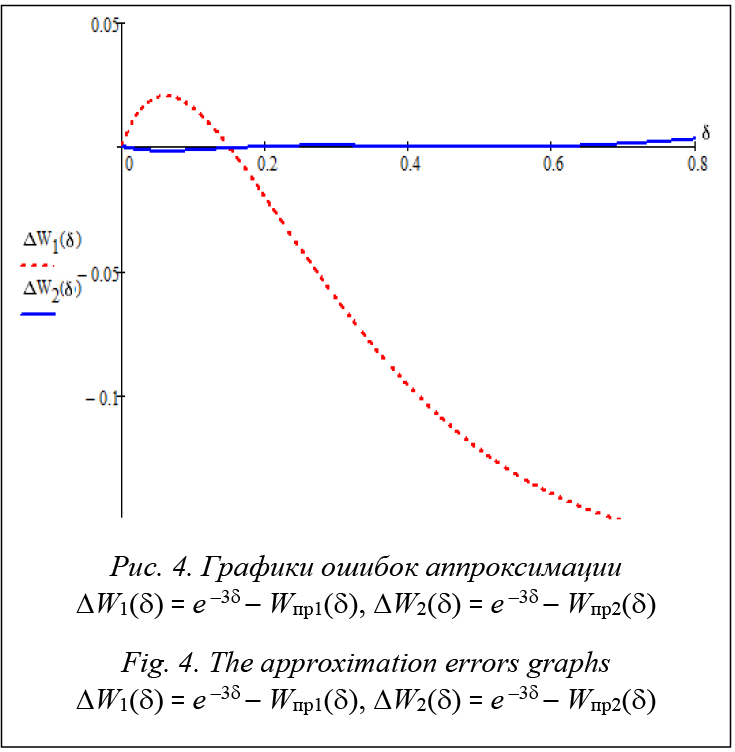
График показывает, что увеличение запаздыва- ния существенно ухудшает робастные свойства САУ по перерегулированию. При этом подчеркнем, что график получен в условиях настройки регулятора САУ на каждое новое изменение времени запаздывания. В тех случаях, когда такая подстройка не выполняется, робастность снижается намного сильнее. Есть основания предполагать, что показатели качества и устойчивости имеют примерно такую же зависимость от величины запаздывания. Представленные сведения свидетельствуют о том, что в рамках рассматриваемого численного подхода имеется возможность оценивать влияние изменения запаздывания на свойства САУ, в частности на перерегулирование. С этих позиций можно дать практическую рекомендацию по выбору величины переменной d1: она должна находиться в середине интервала [d1min, d1max]. Возможности расширения робастных свойств САУ увеличиваются, если перерегулирование ограничивается только сверху, что имеет место во многих практических задачах. При этом достаточно сместить рабочую точку d1 в сторону начала интервала [d1min, d1max]. Повышение точности безаппроксимационного решения уравнения синтеза САУ с запаздыванием Использование неаппроксимированного уравнения синтеза САУ с запаздыванием для повышения точности таких систем привлекательно и в каких-то случаях может оказаться эффективным. Проверим эту возможность, используя прежний объект управления. Для сравнения с традиционным подходом, основанным на приближении звена запаздывания рациональной дробью, выберем два достаточно сильно различающихся по точности приближения звена запаздывания e –tp:
Вычислим неизвестные коэффициенты численным методом [6]. Для структур (9) и (10) получены две модели объекта управления:
Сопоставляя графики, можно констатировать, что погрешность аппроксимации в случае функции второго порядка W2(p) значительно меньше по сравнению с максимально простой функцией первого порядка W1(p). Об этом можно судить не только по графикам, но и по количественным оценкам, например, вида DW = max½DW(d)½. Таким образом, имеются три модели объекта управления: точная и две приближенные, у одной из которых сравнительно высокая точность. Наличие трех различных по точности моделей позволит установить влияние погрешности представления модели на результаты синтеза САУ. Для оценивания результатов были получены функции s=f(d1), соответствующие принятым моделям объектов. Они отвечают требованию по перерегулированию (3), которое является обязательным требованием синтеза САУ. Выяснилось, что вопреки ожиданиям робастность по перерегулированию для всех трех случаев примерно одинакова. Заметно худшие результаты получены для простейшей модели (8) в том смысле, что робастность оказалась ошибочно завышенной за счет увеличения верхней грани- цы dmax. В то же время быстродействие САУ оказалось существенно зависимым от точности модели объекта. С понижением точности модели время установления ty синтезированной САУ увеличивается. Для принятых моделей оно составляет соответственно 149, 151 и 180 с. Это время отсчитывалось для среднего значения инструментальной переменной d1 = (d1max – d1min)/2, когда робастность каждой системы максимальна. Отметим, что при сниже- нии требований по робастности можно умень- шить время установления ty, опираясь на функ- цию s=f(d1). Заключение В работе рассмотрены вопросы синтеза регуляторов САУ объектами, имеющими запаздывание, направленные на повышение робастных свойств этих систем. Для проведения исследований был выбран численный путь, позволяющий снизить трудности, связанные с трансцендентной формой модели звена запаздывания. Этот выбор позволил - составить и решить уравнение синтеза, в котором модель звена запаздывания не требует аппроксимации, что потенциально обеспечивает повышенную точность синтеза САУ; - использовать возможность синтеза САУ, в которых перерегулирование находится в заданных пределах, а быстродействие близко к максимальному; - установить наглядную зависимость, отражающую ухудшение робастности САУ при увеличении запаздывания. Подход может быть реализован не только в рамках синтеза САУ с запаздыванием, но и при построении самонастраивающихся САУ, в которых изменяется как запаздывание, так и другие параметры объекта управления. Для систем этого класса имеются положительные предпосылки [12]. Литература 1. Смит О.Дж.М. Автоматическое регулирование; [пер. с англ. под ред. Е.П. Попова]. М.: Физматгиз, 1963. 847 с. 2. Филимонов А.С. Спектральная декомпозиция динамических систем с запаздываниями: Теория и применения: дисс. д. технич. наук. М.: РУДН, 2003. 426 с. 3. Громов Ю.Ю., Земской Н.А., Лагутин А.В., Ивано- ва О.Г., Тютюнник В.М. Системы автоматического управления с запаздыванием. Тамбов: Изд-во ТГТУ, 2007. 76 с. 4. Козлов О.С., Скворцов Л.М. Решение задач теории автоматического управления в программном комплексе МВТУ // Мехатроника, автоматика, управление. 2016. Т. 17. № 1. С. 3–10. 5. Анализ и оптимальный синтез на ЭВМ систем управления; [под ред. А.А. Воронова и И.А. Орурка]. М.: Наука, 1984. 344 с. 6. Гончаров В.И. Вещественный интерполяционный метод синтеза систем автоматического управления. Томск: Изд-во ТПУ, 1995. 100 с. 7. Тхан Вьет Зунг, Берчук Д.Ю. Экспериментальное определение передаточной функции нагревателя экструдера // Молодежь и современные информационные технологии: сб. тр. XIII Междунар. науч.-практич. конф. Томск: Изд-во ТПУ, 2016. С. 261–262. 8. Михалевич С.С., Байдали С.А., Чурсин Ю.А. Графический метод расчета параметров настройки регуляторов, приводящих систему к заданным показателям устойчивости // Промышленные АСУ и контроллеры. 2013. № 10. С. 35–39. 9. Гончаров В.И., Лиепиньш А.В., Рудницкий В.А. Синтез робастных регуляторов низкого порядка // Изв. РАН. Теория и системы управления. 2001. № 4. С. 36–43. 10. Крутова И.Н. Формирование алгоритма управления итерационным процессом настройки параметров в системе с упрощенной эталонной моделью // Автоматика и телемеханика. 1998. № 2. С. 72–84. 11. Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. М.: Горячая линия-Телеком, 2009. 608 с. 12. Goncharov V. Rudnicki V. Real interpolation method in automatic control systems self-adjustment problem // Systems Science, vol. 36, no. 3, 2010, pp. 35–37. |
 . (1)
. (1) , (2)
, (2)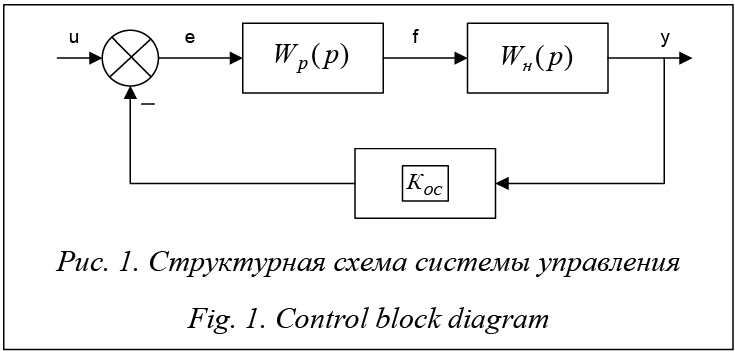
 ,
, ,
, .
. (4)
(4) . Входящая в левую часть уравнения желаемая передаточная функция
. Входящая в левую часть уравнения желаемая передаточная функция  найдется по исходным данным. Неопределенность возникает лишь при задании желаемого времени установления
найдется по исходным данным. Неопределенность возникает лишь при задании желаемого времени установления  , приближенным ориентиром для которого являются коэффициенты знаменателя модели объекта. В условиях численного метода и итерационного приближения к искомому решению неточность такого рода не имеет существенного значения. Более того, как будет ясно из дальнейшего, эта неоднозначность и итерационная процедура позволяют получить множество решений, из которых можно выбрать наиболее подходящее, привлекая дополнительные критерии. Желаемое время переходного процесса
, приближенным ориентиром для которого являются коэффициенты знаменателя модели объекта. В условиях численного метода и итерационного приближения к искомому решению неточность такого рода не имеет существенного значения. Более того, как будет ясно из дальнейшего, эта неоднозначность и итерационная процедура позволяют получить множество решений, из которых можно выбрать наиболее подходящее, привлекая дополнительные критерии. Желаемое время переходного процесса  .
.
 , описывающему эти же системы в разомкнутом состоянии. В левой части уравнение содержит передаточную функцию разомкнутой системы
, описывающему эти же системы в разомкнутом состоянии. В левой части уравнение содержит передаточную функцию разомкнутой системы  , которая находится однозначно по уже известной функции
, которая находится однозначно по уже известной функции  (5)
(5) (6)
(6) (7)
(7) Это позволит оптимизировать быстродействие синтезируемых систем, оценить их робастность [10], а также влияние величины запаздывания объекта управления на эти свойства САУ.
Это позволит оптимизировать быстродействие синтезируемых систем, оценить их робастность [10], а также влияние величины запаздывания объекта управления на эти свойства САУ. = 100 c,
= 100 c,  = 115 c,
= 115 c,  = 130 c. Видно, что положение кривой s=f(d1) зависит от задаваемой величины
= 130 c. Видно, что положение кривой s=f(d1) зависит от задаваемой величины 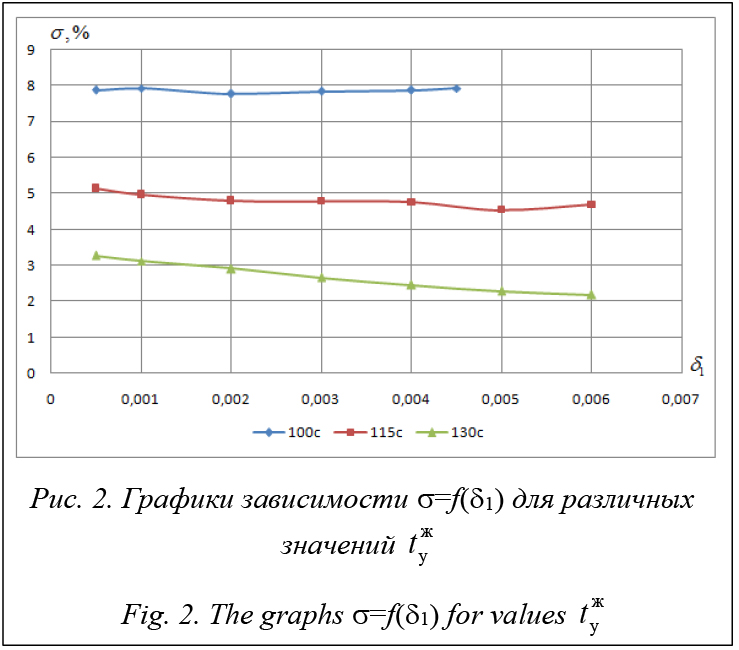
 , (9)
, (9) . (10)
. (10) ,
, .
.
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4246&lang= |
Статья в формате PDF Выпуск в формате PDF (16.33Мб) Скачать обложку в формате PDF (0.33Мб) |
| Статья опубликована в выпуске журнала № 1 за 2017 год. [ на стр. 45-50 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Технология мягких вычислений в проектировании интеллектуальных систем управления
- Репрезентативность метрик на основе событий процессора Intel Sandy Bridge при анализе времени обработки данных в памяти
- Интеллектуальное управление многосвязными объектами, реализованное в ситуационных подпрограммах
- Промышленная роботизированная интеллектуальная робастная система управления: применение технологий квантовых мягких вычислений и квантовой программной инженерии в неопределенных условиях управления
- Нечеткий регулятор со скользящим режимом на основе мягких вычислений
Назад, к списку статей