Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Гибридные когнитивные нечеткие системы управления автономным роботом на основе нейроинтерфейса и технологии мягких вычислений
Аннотация:В статье обсуждаются возможности применения нейроинтерфейса совместно с различными типами регуляторов на типовом примере управления автономным транспортным средством. Проведена оценка возможностей применения методов и средств технологии интеллектуальных вычислений для повышения надежности функционирования системы управления. Цель данной работы – на основе эксперимента показать возможности эффективного применения когнитивного интерфейса («мозг–компьютер–исполнительное устройство») на примере управления транспортным средством (мобильным роботом), раскрыть возможность применения современных технологий управления и показать роль и необходимость интеллектуальных вычислений в работе интерфейса «мозг–компьютер» для повышения надежности и робастности системы управления. В частности, рассмотрена возможность управления типовым движением объекта (вперед, назад, влево, вправо, обход препятствий) посредством когнитивного шлема с помощью стандартного блока распознавания команд и различных типов систем управления, в том числе на основе оптимизатора баз знаний на мягких вычислениях.
Abstract:The article discusses the possibility of applying neurointerface together with different types of regulators via the typical example of controlling an autonomous vehicle. There is an assessment of application possibilities of intelligent computing methods and means to improve the control system performance reliability. The aim of this work is to show experimentally the possibilities of cognitive interface effective application (“brain-computer-actuating device”) on the example of motor vehicle driving (a mobile robot). The paper also reveals modern management technologies application and shows the role and the necessity of intelligent computing in the operating “brain-computer” interface in order to improve the reliability and robustness of the control system. In particular, the paper considers the possibility of controlling the movement of the object (forward, backward, left, right, bypass obstacles) with the help of a cognitive helmet using a standard command recognition block and different types of control systems, including knowledge base optimizer based on soft computing.
| Авторы: Ульянов С.В. (ulyanovsv46_46@mail.ru) - Государственный университет «Дубна» – Институт системного анализа и управления, Объединенный институт ядерных исследований – лаборатория информационных технологий (профессор), Дубна, Россия, доктор физико-математических наук, Решетников А.Г. (reshetnikovag@pochta.ru) - Международный университет природы, общества и человека «Дубна» (аспирант), Дубна, Россия, Мамаева А.А. (allabard@yandex.ru) - Университет «Дубна», Институт системного анализа и управления (аспирант), Дубна, Россия | |
| Ключевые слова: интеллектуальная система управления, мягкие вычисления, нейроинтерфейс, когнитивный регулятор, когнитивная система управления |
|
| Keywords: intelligent control system, soft computing, neurointerface, cognitive control, cognitive control system |
|
| Количество просмотров: 7197 |
Статья в формате PDF Выпуск в формате PDF (21.91Мб) Скачать обложку в формате PDF (0.59Мб) |
До настоящего времени в теории и процессах проектирования интеллектуальных систем управления (ИСУ) как систем, основанных на знаниях (в виде соответствующих баз знаний (БЗ)), проектирование самих БЗ осуществлялось экспертом на основе или интеллектуальных вычислений типа мягких вычислений с применением генетических алгоритмов, или нечетких нейронных сетей. Роль человека-оператора в контуре управления не учитывалась в явном виде либо описывалась передаточными функциями упрощенного типа. Довольно давно установлено [1], что в контуре управления больших многоконтурных связанных систем управления часто бывает до 75 % избыточной информации, которая не используется или мешает принятию решения. Поэтому одной из центральных проблем разработки ИСУ являлся поиск конструктивного решения задачи проектирования БЗ в заданной проблемно-ориентированной области применения при наличии неопределенности и риска. Включение в контур управления человека-оператора часто ассоциировалось с появлением и повышением риска в принятии решения из-за человеческого фактора, несмотря на возможность учета интеллектуального ресурса самого оператора. В свою очередь, одно из направлений технологического роста интерфейсов вычислительных систем, неразрывно связанных с ростом вычислительной мощности, направлено именно на интеграцию психофизиологических особенностей поведения пользователя (оператора) с виртуальным и информационным полем эффективной деятельности человека. Такое развитие порождает новые классы аппарат- ной и программной реализации интерфейсов и сталкивается с задачами обработки огромного количества индифферентных данных пользователя. Очевидной становится необходимость наличия интеллектуальных свойств адаптации и обучения ПО такого рода интерфейсов. Большое внимание уделяется, например, вопросу применения когнитивного интерфейса совместно с различными типами структур управления. Работы зарубежных исследователей показали возможности использования стимулирующих сигналов для обучения и при генерации управляющих команд оператором [2, 3]. Однако извлечение знаний и разработка БЗ непосредственно из мыслительного процесса (электроэнцефалограммы, ЭЭГ) не рассматривались. Напротив, результаты рабо- ты [4] показали возможность восстановления образов мыслительного процесса непосредственно из сигналов ЭЭГ. Отметим, что и в подобных системах не рассматривается возможность извлечения знаний из сигнала ЭЭГ оператора для формирования адаптивной обучающейся системы. Обычно для тренировки когнитивных способностей оператора широко применяются специализированные тренажеры – игры, например нейроинтерфейс EPOC [5]. Эти тренажеры не обладают специализированным программным модулем для обучения и адаптации системы управления (самой программы) к физиологическим особенностям оператора [6, 7]. В свою очередь, зарекомендовавшие себя в широком классе областей мягкие вычисления (генетические алгоритмы, нечеткая логика и нечеткие нейронные сети) позволяют спроектировать интеллектуальную когнитивную систему управления, обладающую такими качествами. Соответственно, технологический рост данного направления неразрывно связан с наличием и развитием специализированных программных инструментариев проектирования ИСУ. В качестве такого инструментария в данной работе выступает оптимизатор баз знаний (ОБЗ) на мягких вычислениях, являющийся (с точки зрения теории нечетких систем) универсальным аппроксиматором для формирования БЗ нечеткого регулятора (НР). Структурно оптимизатор включает в себя три генетических алгоритма, на каждом этапе работы которого формируется оптимальная структура нечеткой нейронной сети с оптимальным количеством продукционных правил и значений весовых коэффициентов узлов. В свою очередь, это гарантирует робастность системы управления в условиях помех и смешанных сигналов [8].
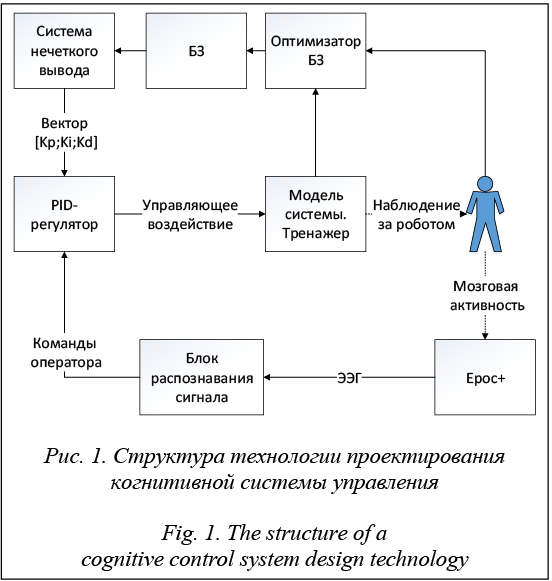
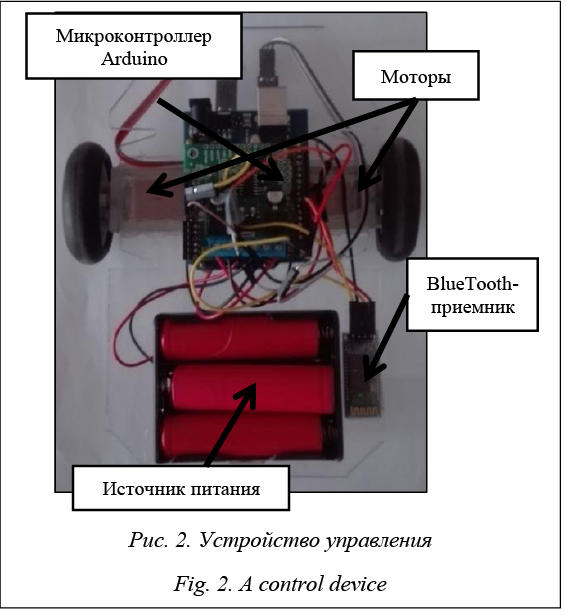
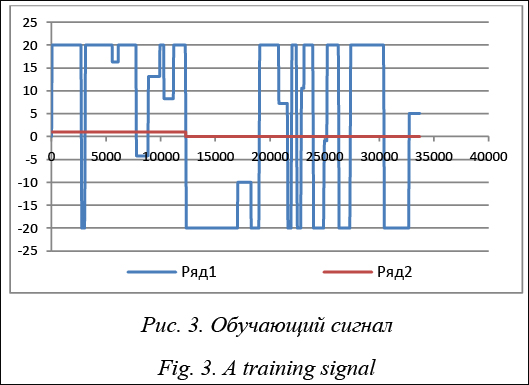
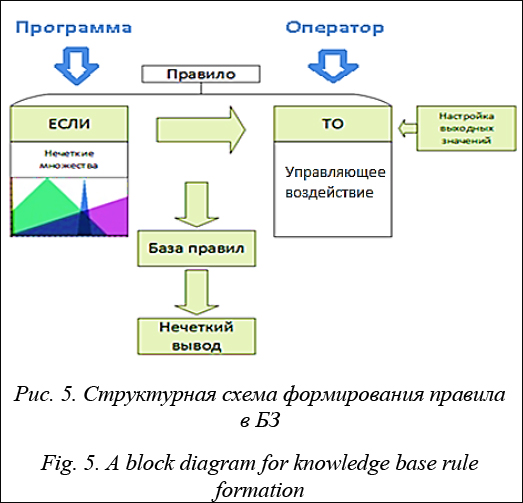
Для снятия сигнала о мозговой активности [9, 10] использовался когнитивный шлем Emotiv EPOC+ совместно с поставляемым ПО (EPOC Control Panel). Структурно Emotiv EPOC+ состоит из 14 каналов для снятия сигнала. Для метода отбора проб используется последовательная выборка. Частота ее – 128 выборок в секунду (внутренний 2048 Гц) с разрешением оцифровки 14 бит и пропускной способностью 0,2–45 Гц. Поставляемое ПО позволяет получать, распознавать и регистрировать ЭЭГ-сигнал со шлема, ментальные команды и назначать на них определенные действия (например, посылать управляю- щий сигнал на Bluetooth-устройство для движения автономного робота вперед, назад, влево и вправо). Обучение ментальной команде заключается в записи состояния покоя и состояний, когда субъект представляет образ какого-либо действия, концентрируя мозговую активность в определенном участке мозга. Запись таких состояний занимает 8 секунд. Качество распознавания команд разработчики такого оборудования обычно связывают с уровнем подготовки оператора в генерировании различных ментальных команд. В комплекте ПО поставляются специализированные игры – тренажеры для обучения и тренировки. Проектирование когнитивного регулятора для управления автономным роботом Обычно в качестве системы управления на объекте устанавливают регулятор, который в зависимости от ментальных команд оператора вырабатывает управляющее воздействие для исполнительных механизмов. В качестве такого регулятора может выступать, например, простой релейный регулятор, где для конечного множества выходных команд (вперед, назад, влево, вправо) вырабатываются одни и те же управляющие воздействия. В данной работе испытывались пропорциональный регулятор, пропорционально-интегральный (ПИ) регулятор с блоком нечеткого вывода, пропорционально-интегральный дифференцирующий (ПИД) регулятор с различными коэффициентами усиления. Для проведения эксперимента был выбран объект управления – мобильный робот в виде трехколесной машинки с Bluetooth-управлением (рис. 2). В устройстве управления в качестве процессора для управления используется Arduino Uno сов- местно с драйвером двигателя – Pololu Dual MC33926. Два Мотора – DC 9V Motor. Bluetooth-модуль – HC-05. Источником питания служат три 3V Li-On-батареи. Руководствуясь принципом неразрушения нижнего исполнительного уровня управления (рис. 1), применение интеллектуальной надстройки в виде ОБЗ основано на извлечении сигналов обучения из сигналов траектории управления оператором. Так, в процессе управления роботом на основе заданного типа регулятора регистрируются траектории движения (рис. 3). Из выходного сигнала блока распознавания путем сложения формируется интегральная составляющая, далее эксперт выбирает соответствующее управляющее воздействие на основе предыдущего опыта использования системы. Для аппроксимации обучающего сигнала с целью извлечения знаний применялся разработанный ОБЗ с выбранной моделью нечеткого вывода (Сугено 1-го порядка). В частности, использовались сигнал с блока распознавания сигнала EPOC, а также интегральная величина сигнала и идентификационный номер требуемой команды.
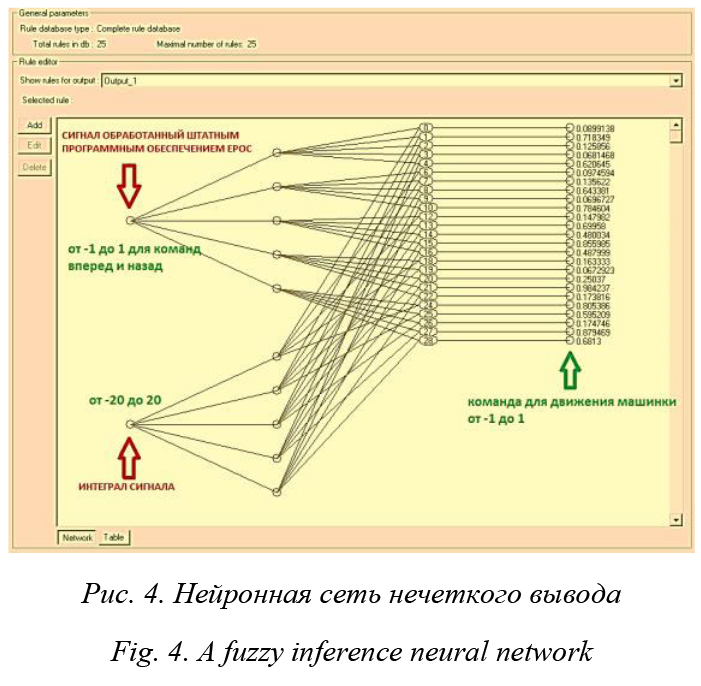
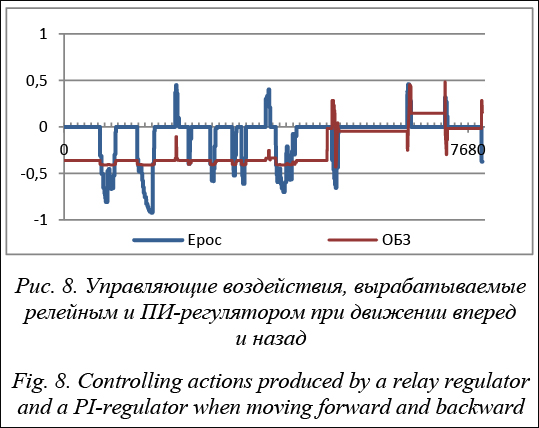
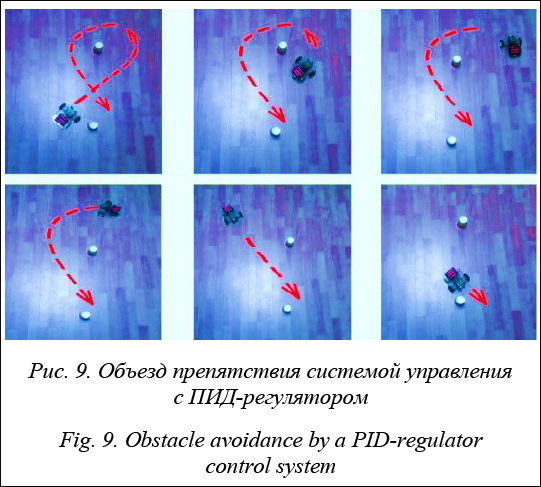
На этапе создания БЗ полученный обучающий сигнал используется для формирования лингвистических переменных для входных значений. В данной работе количество нечетких множеств в каждой лингвистической переменной было ограничено до трех. Другими словами, на вход в нейронную сеть поступают команды от программного модуля распознавания сигнала EРОС (вперед, назад, влево и вправо), на выход поступают значения для команды движения устройства, установленные экспертом (рис. 4). Применение БЗ совместно с ПИ-регулятором обусловлено необходимостью формирования более мягкой структуры для управления. С этой целью создавались лингвистические переменные (ЛП) для каждой из записанных команд в системе распознавания, формировалась полная БЗ с использованием нечетких множеств ЛП (рис. 6). Правая часть регулятора содержала соответствующие значения для управляющего воздействия с применением ПИ-регулятора. Таким образом, уровень активации правила в базе правил соответствовал уровню активации управляющего воздействия. На рисунке 7 приведен результат когнитивного управления движением мобильного робота в лабиринте на основе ПИ-регулятора. В работе рассматривались следующие регуляторы для управления роботом: П-, ПИ-, ПИД-регуляторы с постоянными и переменными коэффициентами. На рисунке 8 представлены выходные команды систем управления для управления роботом. На графике зеленым цветом показан целевой сигнал, который соответствует движению вперед и назад, другими цветами выделены уровни активации П- (на рисунке Epoc) и ПИ-регулятора с БЗ. Как видно из графика на рисунке 8, в момент, когда задача оператора – движение машинки назад, и происходит концентрация мыслительного процесса на этой команде, стандартный блок не всегда правильно определяет управляющее воздействие и робот движется рывками или даже в другую сто- рону (ложное срабатывание). Однако дополнительная надстройка в виде интегральной составляющей в БЗ позволяет сгладить последовательность команд и уменьшить количество ошибок при достижении цели. При работе системы распознавания когнитивных сигналов часто возникают неверные (ложные) срабатывания, вызванные артефактами мышечной и мыслительной активности, или команды недостаточно хорошо распознаются в связи с уровнем подготовки оператора. На пропорциональный регулятор это оказывает серьезное воздействие, и работа системы вызывает трудности при эксплуатации.
Как можно заметить, повышение интеллектуальности ПО влияет на выработку эффективного управляющего воздействия регулятором и на работу системы в целом. Однако установление оптимальных значений коэффициентов для каждого момента времени является актуальной и очень важной задачей. При неверной (ложной) установке значений также наблюдается неверное срабатывание, объект управления движется рывками. Заключение Результаты показали, что качество управления объектом значительно повышается при применении разработанной схемы управления. Проведенная работа демонстрирует необходимость создания унифицированной технологии проектирования систем управления для нейроинтерфейсов и недостаточность робастности функционирования поставляемого в настоящее время ПО. Стоит отметить, что дальнейшее развитие когнитивных технологий управления неразрывно связано с методами регистрации и интерпретации ЭЭГ мозга оператора с применением специализированных фильтров, сглаживающих сигналы ЭЭГ и удаляющих помехи и шумы (артефактов), вызванные психофизиологическим состоянием и внешними факторами, и с применением интеллектуальных технологий в ПО исполнительных механизмов для обучения и адаптации систем управления с оператором в контуре управления. Литература 1. Петров Б.Н., Уланов Г.М., Ульянов С.В., Хазен Э.М. Информационно-семантические проблемы в процессах управления и организации. М.: Наука, 1977. 452 с. 2. Po-Lei Lee, Hsiang-Chih Chang, Tsung-Yu Hsieh, Hua-Ting Deng, and Chia-Wei Sun. A brain-wave-actuated small robot car using ensemble empirical mode decomposition-based approach. IEEE Transactions on Systems, Man, and Cybernetics. Part a: Systems and Humans, 2012, vol. 42, no. 5, pp. 1053–1064. 3. Becedas J. Brain-machine interfaces: basis and advances. IEEE Transactions on Systems, Man, and Cybernetics. Part a: Systems and Humans, 2012, vol. 42, no. 6, pp. 825–836. 4. Miyawaki Y., Uchida H., Yamashita O., Sato M., Mori- to Y., Tanabe H., Sadato N., and Y. Kamitani. Visual image reconstruction from human brain activity using a combination of multiscale local image decoders. Neuron, 2008, vol. 5, no. 60, pp. 915–929. 5. Jaime Gomez-Gil, San-Jose-Gonzalez, Luis Fernando Nicolas-Alonso, Sergio Alonso-Garcia. Steering a tractor by means of an emg-based human-machine interface. Sensors, 2011, no. 11, pp. 7110–7126. DOI: 10.3390/s110707110. 6. Kane M.J., Conway A.R.A., Miur T.K. & Colflesh G.J.H. Working memory, attention control, and the N-back task: a question of construct validity. Jour. of Experimental Psychology: Learning, Memory, and Cognition, 2007, no. 33, pp. 615–622. 7. Anguera J.A. et all. Video game training enhances cognitive control in older adults. Nature, 2013, vol. 501, pp. 97–101. 8. Ульянов С.В., Литвинцева Л.В., Добрынин В.Н., Мишин А.А. Интеллектуальное робастное управление: технологии мягких вычислений. М.: Изд-во ВНИИгеосистем, 2011. 406 c. 9. Barker A.T., Jalinous R., Freeston I.L. Non-invasive magnetic stimulation of human motor cortex. Lancet, 1985, vol. 11, pp. 1106–1107. 10. Бархатова И.А., Соколов И.А., Шмыков Г.Ю., Улья- нов С.В. Интеллектуальные самоорганизующиеся когнитивные регуляторы. Ч. 2: Модели когнитивных интерфейсов «мозг–устройство» // Системный анализ в науке и образовании. 2015. № 1. URL: http:/www.sanse.ru/archive/32 (дата обращения: 23.05.2017). 11. Бархатова И.А., Ульянов С.В. Интеллектуальные самоорганизующиеся когнитивные регуляторы. Ч. 3: Информационно-термодинамический закон распределения качества и обобщенная структура интеллектуального когнитивного управления // Системный анализ в науке и образовании. 2015. № 1. URL: http:/www.sanse.ru/archive/32 (дата обращения: 23.05.2017). |

| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4310&lang= |
Статья в формате PDF Выпуск в формате PDF (21.91Мб) Скачать обложку в формате PDF (0.59Мб) |
| Статья опубликована в выпуске журнала № 3 за 2017 год. [ на стр. 420-424 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Технология мягких вычислений в проектировании интеллектуальных систем управления
- Когнитивные регуляторы: технологии мягких вычислений и информационно-термодинамический закон самоорганизации интеллектуального управления
- Интеллектуальная информационная система для решения задач прогнозирования неисправностей вагонного оборудования на железнодорожном транспорте
- Математические модели реограмм состояния в программах Table Curve 2d/3d как основа интеллектуальной системы управления процессами структурирования многокомпонентных эластомерных композитов
- Нечеткий регулятор со скользящим режимом на основе мягких вычислений
Назад, к списку статей