Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Сетецентрическое управление на основе микро- и макромоделей транспортных потоков
Аннотация:В качестве методологической основы технологии сетецентрического управления транспортными потоками использованы таксономические модели сложноорганизованной интеллектуальной транспортной геоинформационной среды ITSGIS. Геоинформационный анализ и таксономическое проектирование позволили разработать эволюционную технологию моделирования поведения потоков на улично-дорожной сети. Сетецентрическое координированное управление потоками позволяет упорядочить транспортные потоки, увеличить пропускную способность сети и улучшить экологию за счет сокращения транспортных задержек. Любой модуль имитационной среды ITSGIS, локализованный информационно, как программный эквивалент класса объектов транспортной инфраструктуры, характеризуется триадой <ТуреOb, TFunction, Algorithm>, где ТуреOb – тип объектов класса, TFunction – действия над объектами – переменными типа ТуреOb, Algorithm – схемы поведения объектов-экземпляров класса. TFunction и ТуреOb экспортируются из модуля-класса, Algorithm инкапсулированы в нем так, что пассивация и активация элементов Algorithm вне модуля опосpедована, – она производится через вызовы элементов TFunction. Конечная задача локального управления – переключение светофорных сигналов в зоне одного перекрестка, для нее в качестве ТуреOb выступают объекты класса «Регулируемый_Перекресток», в качестве TFunction – метод MLocalControl. Эта задача разделена на частные задачи (Algorithm): фазообразование, компоновка фаз, коррекция длительностей, формирование переходных интервалов и др. Целью управления на перекрестке является обеспечение безопасного и эффективного движения. В качестве основополагающего критерия эффективности алгоритмов принята величина задержки. При расчете сетецентрического управления с использованием программ координации задачи решаются с помощью графоаналитического метода и определения сдвига фаз. Использование объектно-ориентированных геотехнологий позволяет в среде ITSGIS моделировать макроструктуру различной сложности с произвольным набором имманентных свойств. Система моделирования транспортных потоков, проходящих через транспортные узлы (перегоны, перекрестки, кольца, железнодорожные переезды, тоннели), на которых присутствуют объекты транспортной инфраструктуры (регулируемые и нерегулируемые пешеходные переходы, светофоры, дорожные знаки, ограждения, искусственные дорожные неровности и т.д.), использует модели разного представления (микромодели, макромодели, мультиагентные модели, интеллектуальные социообъекты).
Abstract:A methodological basis of the technology of network-centric traffic management is taxonomic models of complex intelligent transport geoinformation environment ITSGIS. Geoinformation analysis and taxonomy design led to the de-velopment of an evolutionary technology model of flows behavior on a road network. Network-centric coordinated flow control allows organizing traffic, increasing network bandwidth and improving the environment by reducing transport delays. Any module of the simulation environment ITSGIS localized informationally, as a software equivalent of a class of transport infrastructure objects, is characterized by the triad <ТуреOb, TFunction, Algorithm>, where ТуреOb is a type of class objects, TFunction means actions with objects that are variables of the type ТуреOb, Algorithm means behavior schemes of class instance objects. TFunction and ТуреOb are exported from a module class, Algorithm are encapsulated in it, so that the passivation and activation of Algorithm elements outside the module is mediated. It is produced through the invoking TFunction elements. The ultimate goal of the local control is switching traffic lights within one intersection. ТуреOb for this task are objects of the class “Reguliruemy_Perekrestok”, TFunction is the method MLocalControl. This task is divided into partial tasks (Algorithm): phase formation, arrangement of phases, correction of durations, formation of transition intervals etc. A control purpose at an intersection is ensuring safe and efficient movement. A fundamental criterion of the algorithms efficiency is the amount of delay. When calculating network-centric control using coordination programs, the problems are solved using the graphical analytic method and determination of a phase shift. Object-oriented geotechnologies allow modeling a macrostructure of varying complexity with an arbitrary set of inherent properties in the ITSGIS. Simulation of transport flows passing through the transport network (waysides, intersections, rings, railway crossings, tunnels), which include transport infrastructure objects (regulated and unregulated pedestrian crossings, traffic lights, road signs, fencing, speed breakers, etc.), uses different representation models (micro models, macro models, multi-agent models, intelligent social objects).
| Авторы: Михеев С.В. (mikheevati@its-spc.ru) - Самарский государственный аэрокосмический университет им. академика С.П. Королева (национальный исследовательский университет (доцент), Самара, Россия, кандидат технических наук | |
| Ключевые слова: координированное управлен, сетецентрическое управление, микромодели, макромодели, транспортные потоки, геоинформационные технологии, интеллектуальные транспортные системы, транспортная сеть, имитационная среда, локальное управление, таксономическая модель |
|
| Keywords: coordinated control, etworkcentric management, micro model, macromodels, traffic flow, geoinformation technologies, intelligent transport systems, transportation network, imitation environment, local management, taxonomic model |
|
| Количество просмотров: 6879 |
Статья в формате PDF Выпуск в формате PDF (29.74Мб) |
Постоянное усложнение дорожно-транспортных условий требует непрерывного совершен- ствования методов и средств управления транспортными потоками (ТрП). Актуальной является проблема создания гибкой технологии, обеспечивающей проведение компьютерных экспериментов в предметной области (ПрО) «Управление транспортными потоками» и имеющей эффективную реализацию в современной геоинформационной среде, легко адаптирующейся к задачам исследования ПрО. Эта проблема связана с использованием методов и инструментальных средств, позволяющих разрабатывать технологии компьютерного исследования с полным учетом свойств ПрО и профессионального кругозора исследователя. В качестве методологической основы компьютерной технологии управления ТрП резонно использовать таксономические модели сложноорганизованной интеллектуальной транспортной геоинформационной среды ITSGIS, которые, с одной стороны, органично связаны с иерархической де- композицией ПрО, а с другой – имеют адекватную реализацию в виде механизмов наследования: - геоинформационные таксономические технологии [1] позволяют проводить исследования ТрП в естественных категориях предметно-ориентированного лексикона пользователя-исследователя без знания технологических аспектов программирования; - объектно-ориентированные имитационные технологии исследования отличаются от существующих наличием гибкой инструментальной среды, допускающей простую модификацию и расширение спектра исследовательских задач, а также наличием адаптивного управления ТрП [2]; - геоинформационный анализ и таксономическое проектирование позволяют создавать эволюционную технологию моделирования поведения ТрП на улично-дорожной сети (УДС) города; такая технология в отличие от существующих имеет возможность не только получать в имитационном эксперименте новые знания о различных объектах транспортной инфраструктуры, но и использовать их для развития технологии проектирования и исследования путем уточнения и расширения понятийных основ ПрО [3]; - использование сетецентрического координированного управления ТрП на УДС [4] города приведет к упорядочению ТрП, увеличению пропускной способности транспортной сети и улучшению экологической ситуации за счет сокращения транспортных задержек. Применение сетецентрического управления ТрП в среде интеллектуальной транспортной геоинформационной системы ITSGIS [5] обеспечивает: - повышение безопасности дорожного движения; - увеличение пропускной способности транспортной сети; - снижение задержек транспорта на перекрестках; - увеличение эффективности использования УДС; - снижение расхода горюче-смазочных материалов; - оздоровление экологической обстановки; - повышение оперативности управления движением. В рамках сетецентрического подхода ITSGIS изначально построена как распределенная, открытая для наращивания и состоящая из автономных, но согласованно и координированно действующих интеллектуальных подсистем отдельных транспортных районов, которые в случае необходимости могли бы взаимодействовать, выявлять конфликты и находить приемлемые компромиссы [6]. Управление, основанное на сетецентрическом принципе, обеспечивает построение зон управления, в которых происходит обмен информацией между управляющими центрами. Управляющие центры, расположенные в пределах зоны управления, могут получать данные о целях и действиях управляющих центров других зон, управлять ТрП на перекрестках и перегонах в пределах своей зоны управления. Задача координированного управления – минимизация количества транспортных средств, вынужденных остановиться перед перекрестком [7]. Рассматривая ITSGIS как компьютерную технологию автоматизированного исследования ТрП, построенную на декомпозиционной основе таксономических отношений объектов предметной области, получаем возможность: - предоставления пользователю-непрограммисту предметно-ориентированных средств спецификации моделей; - снижения трудоемкости и улучшения качества управления ТрП за счет использования принципов сетецентрического управления; - проведения имитационных экспериментов и анализа их результатов. Интеллектуальная транспортная геоинформационная система ITSGIS предназначена для выполнения следующих основных функций [8]: - построение объектно-ориентированных моделей инструментальных программных средств исследования ТрП на основе таксономической спецификации межклассовых отношений исследуемой предметной области [9]; - программная реализация классов ПрО на основе таксономических моделей, а также разработка CASE-инструментов поддержки среды исследования и управления [10]; - автоматический мониторинг состояния объектов транспортной инфраструктуры (дислокация технических средств организации дорожного движения, структура светофорного цикла); - автоматический мониторинг ТрП (сбор и анализ данных об интенсивности ТрП, скорости движения и составе ТрП от различных детекторов транспорта) [11]; - отображение объектов транспортной инфраструктуры (дорожных знаков, светофорных объектов, интенсивности движения ТрП) на электронной карте [12]; - автоматическое координированное управление светофорными объектами; координация заключается в организации согласованной работы светофоров на смежных перекрестках, при этом с помощью соответствующих математических моделей выполняется многокритериальная оптимизация на сети улиц; сущность координированного управления сводится к обеспечению безостановочного проезда группы автомобилей с определенной скоростью через все регулируемые перекрестки магистрали, для этого сдвиг фаз регулирования в направлении координации выбирается, исходя из заданной скорости движения групп и расстояния между перекрестками; переключение программ координации осуществляется по расписанию (по времени суток и дням недели) либо по параметрам ТрП (адаптивно) [13]; - оперативное сетецентрическое управление движением ТрП в экстремальных ситуациях, задание специальных режимов светофорного регулирования; - телевизионный надзор за транспортной ситуацией и оперативной обстановкой в наиболее напряженных узлах УДС; - автоматическое и оперативное сетецентрическое управление движением ТрП на скоростных магистралях города, в том числе автоматическое обнаружение заторов и ДТП, а также управление движением в тоннелях; - автоматизированное информирование участников движения с помощью динамических информационных табло и управляемых дорожных знаков о дорожно-транспортной ситуации; - контроль и диагностика периферийного оборудования и каналов связи. Для оценки оптимальности сетецентрического координированного управления ТрП используется критерий транспортной задержки на управляемом перекрестке. Сравнительный анализ натурных испытаний и имитационного моделирования алгоритмов локального и координированного управления ТрП позволяет делать вывод о корректности построенных сетецентрических моделей и адекватности работы ITSGIS. Систематизация и обобщение известных схем локального и координированного управления ТрП на УДС города дает возможность выстроить общую структуру управления и спроектировать схему сетецентрического управления. Такая схема основана на расслоении динамических свойств ITSGIS и позволяет реализовать универсальные инструментальные средства управления имитацией [8]. Любой модуль имитационной среды ITSGIS, локализованный информационно, как програм- мный эквивалент класса объектов транспортной инфраструктуры, характеризуется триадой <ТуреOb, TFunction, Algorithm>, где ТуреOb – тип объектов класса, TFunction – действия над объектами – переменными типа ТуреOb, Algorithm – схемы поведения объектов-экземпляров класса. TFunction и ТуреOb экспортируются из модуля-класса, Algorithm инкапсулированы в нем так, что пассивация и активация элементов Algorithm вне модуля опосpедована, она производится через вызовы элементов TFunction. Конечная задача локального управления – переключение светофорных сигналов в зоне одного перекрестка, для нее в качестве ТуреOb выступают объекты класса «Регулируемый_Перекресток», в качестве TFunction – метод MLocalControl. Эта задача разделена на несколько частных задач (Algorithm): фазообразование, компоновка фаз, коррекция длительностей, формирование переходных интервалов [5]. Транспортная ситуация на управляемом перекрестке в момент времени t описывается вектором состояния Эффективность локального управления ТрП оценивается степенью приближения истинного состояния ТрП Целью управления ТрП на перекрестке является обеспечение безопасного и эффективного движения. В качестве основополагающего критерия эффективности алгоритмов принимаем величину задержки, приходящейся на одно транспортное средство [15]. Его достоинством являются простота реализации при исследовании любым способом (эмпирически, аналитически, моделированием), наглядность, прямая связь со стоимостным выражением потерь и в связи с этим возможность непосредственной оценки эффективности процесса управления. В процессе исследования в качестве вторичных можно использовать и другие критерии оптимизации. Для расчета, принятого за основу критерия эффективности локального управления ТрП, используется критерий Вебстера. В качестве параметров, используемых для оценки задержки D, выступают следующие показатели: T – длительность цикла (сек.); Gj – зеленая и Rj – красная фазы светофорного цикла (сек.); Nj – число транспортных средств, ожидающих в очереди; I – интенсивность ТП (авт./сек.); gj – часть эффективного времени горения зеленого сигнала, соответствующего времени свободного проезда (сек.). При реализации и сравнительной оценке алгоритмов управления ТрП на перекрестке в реальном масштабе времени используется следующий подход: разбиение диапазона изменения интенсив- ностей на короткие циклы с приблизительно одинаковыми значениями; определение задержки для циклов с учетом режима работы перекрестка; суммирование расчетных значений для получения общего конечного результата. В режиме разъезда очереди часть цикла, в которой образуется задержка, tpj = Tj – gj; число транспортных средств, ожидающих в очереди, Npj = Ij(Tj – gj); число транспортных средств, задержанных в очереди в j-м цикле, Noj = Nj–1 + Ij ×Tj. При расчете программ координации для магистралей с двусторонним движением ТрП возможно возникновение ситуаций, которые сложно и трудоемко правильно решать с помощью графоаналитического метода, предназначенного для решения таких задач. В этом случае используется метод, определяющий сдвиги фаз на каждом перекрестке, минимизирующий величину обобщенного критерия транспортной задержки на магистрали:
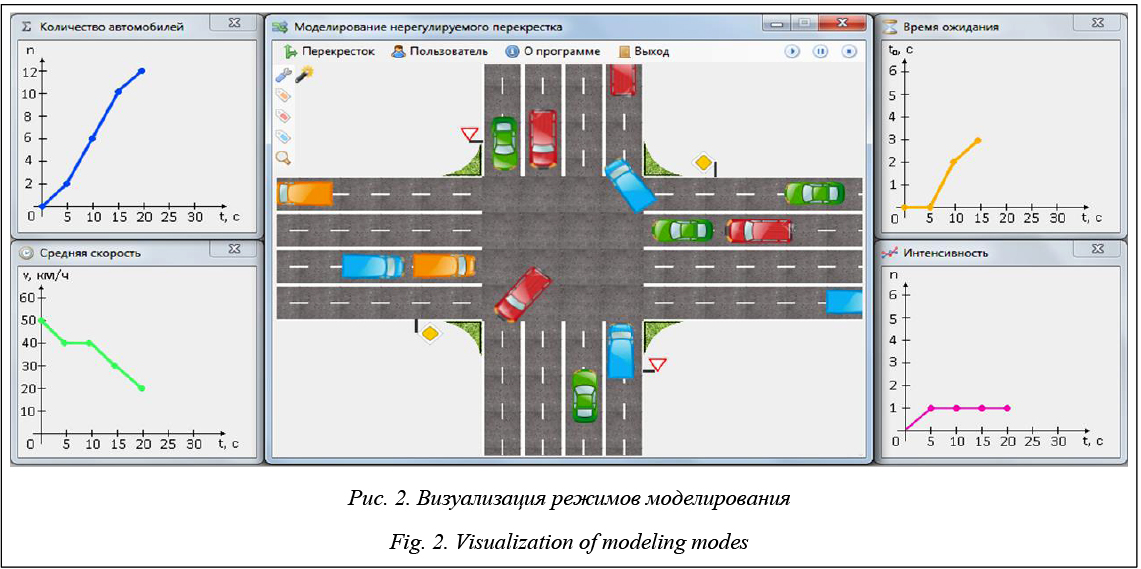
где f(Di) – задержка ТП на i-м перекрестке для прямого направления; Расчет обобщенного критерия проводится в ITSGIS с применением имитационной модели объекта управления: исходные данные о параметрах объекта управления (интенсивность, время проезда и т.д.) заносятся в модель, и затем проводится просчет на модели при заданных параметрах светофорного регулирования. Использование объектно-ориентированных геотехнологий позволило в имитационной среде ITSGIS моделировать макроструктуру ТрП различной сложности с произвольным набором имманентных свойств. В среде моделирования на электронной карте предусмотрена возможность конструирования УДС произвольной конфигурации, включающей большое количество перекрестков, варьируемого уровня сложности. Сетецентрическое координированное управление ТрП позволяет достичь следующих расчетных технико-экономических показателей: - снижение задержек транспорта до 20–25 %; - уменьшение времени поездки до 10–15 %; - уменьшение массы выбросов окиси углерода, углеводородов, окислов азота и других вредных веществ до 5–10 %; - снижение потребления горючего до 5–15 %. Система моделирования ТрП, проходящих через транспортные узлы (перегоны, перекрестки, кольца, железнодорожные переезды, тоннели), на которых присутствуют объекты транспортной инфраструктуры (регулируемые и нерегулируемые пешеходные переходы, светофоры, дорожные знаки, ограждения, искусственные дорожные неровности и т.д.), использует модели разного представления (микромодели, макромодели, мультиагентные модели, интеллектуальные социообъекты). Для разработки системы выбраны следующие средства: MS Visual Studio 2013, система управления базами данных SQLite, средство объектно-реляционного отображения NHibernate и система контроля версий исходного кода Subversion. При моделировании движения ТрП в качестве события используется появление случайного транспортного средства на участке дороги на основе законов распределения случайных величин: экспоненциальный, нормальный, равномерный и Пуассона. Применяется метод нелинейного преобразования – теоретически строгий метод моделиро- вания случайных последовательностей, позволяю- щий получать случайные числа даже тогда, когда величина определена на бесконечных интервалах числовой оси (как для экспоненциальной случайной величины, когда x Î (0, ¥)).
Поведение агентов в системе зависит от текущей ситуации. Для агентов-водителей существуют следующие события, характеризующие ситуацию: - впереди транспортное средство; - опасность столкновения; - опасность выезда за пределы трассы; - впереди транспортный узел; - впереди светофор; - впереди дорожный знак; - впереди заторовая ситуация; - разветвление траектории движения; - слияние траектории движения. Благодаря мультиагентной модели ТрП, можно изменять ее элементы на ходу без отрицательных эффектов: в любой момент можно остановить моделирование, а затем возобновить. Агенты моментально отреагируют на любой новый объект в системе или удаление существующего.
При описании сетецентрического управления транспортными потоками выделены несколько уровней, на каждом из которых решаются определенные задачи. На первом, самом нижнем, решаются задачи локального управления, на других – задачи координированного управления с выработкой управляющих воздействий для сети перекрестков через длительные по сравнению с локальными промежутками времени (15–20 мин.). Для больших районов задачи координированного управления следующие: - разделение района на участки и оперативное формирование программ координации для каждого из них; - синхронизация программ координации (при условии равенства или кратности циклов управления). Задачи системного управления транспортными потоками взаимосвязаны между собой. В результате решения задачи высокого уровня определяется область ограничений для задач нижнего уровня. На задачи локального управления накладываются ограничения, определяемые на втором уровне переключения светофорных сигналов. На задачи второго уровня накладываются ограничения по циклу, определяемые в результате решения задач синхронизации программ координации. В свою очередь, задачи второго и третьего уровней решаются с учетом ограничений, вырабатываемых на верхних уровнях. Систематизация и обобщение известных схем сетецентрического управления транспортными потоками на УДС города дает возможность выстроить общую структуру управления и спроектировать схему опосредованного управления. Такая схема основана на расслоении динамических свойств интеллектуальной транспортной геоинформационной системы ITSGIS и позволяет реали- зовать универсальные инструментальные средства управления имитацией. Литература 1. Golovnin O.K., Mikheeva T.I., Klyuchnikov V.A. Territorial management using ITSGIS. Proc. 2nd Intern. Conf. Intelligent Technologies for Information Processing and Management, Ufa, Russia, 2014, vol. 1, pp. 211–214. 2. Бадд Т. Объектно-ориентированное программирование в действии. СПб: Мир, 1997. 464 с. 3. Михеева Т.И., Федосеев А.А., Головнин О.К. Модель пространственных данных оценки состояния объектов транспортной инфраструктуры в интеллектуальной ГИС «ITSGIS» // Геоинформационные технологии в проектировании и создании корпоративных информационных систем: Межвуз. науч. сб. Уфа: Изд-во УГАТУ, 2013. С. 69–73. 4. Амбарцумян А.А. Сетецентрическое управление на сетях Петри в структурированной дискретно-событийной системе // Управление большими системами. 2010. № 30.1. С. 506–535. 5. Михеева Т.И., Михеев С.В., Головнин О.К. Метод синтеза системы зонального сетецентрического управления транспортными процессами // Изв. Самарского научного центра РАН. 2016. Т. 18. № 4 (4). С. 799–807. 6. Михеева Т.И., Михеев С.В., Головнин О.К., Сапры- кин О.Н. Паттерны проектирования сложноорганизованных систем. Самара: Интелтранс, 2015. 216 с. 7. Затуливетер Ю.С., Фищенко Е.А. Графодинамические системы с сетецентрическим управлением в математически однородном поле компьютерной информации // Управление большими системами: сб. тр. 2010. № 30.1. С. 567–604. 8. Mikheeva T.I., Bogdanova I.G., Fedoseev A.A., Golov- nin O.K. [et al]. Intelligent transport systems: methods, algorithms, realization. Saarbrucken: LAP Lambert Acad. Publ., 2014, 164 p. 9. Михеев С.В., Михеева Т.И. Модели наследования в системе управления дорожным движением // Информационные технологии. 2001. № 7. С. 50–54. 10. Михеев С.В. Таксономические модели управления дорожным движением // Актуальные проблемы радиоэлектроники. Самара: Изд-во СГАУ, 2000. С. 91–95. 11. Михеев С.В. Алгоритм жесткого координирования дорожного движения. В кн.: Перспективные информационные технологии в научных исследованиях, проектировании и обучении. Самара: Изд-во СГАУ, 2001. С. 80–88. 12. Петров В.В., Кашталинский А.С. Управление транспортными потоками с учетом их стохастичности // Вестн. СибАДИ. 2012. № 24. С. 27–29. 13. Михеев С.В. Расчет программ координации управления транспортными потоками // Вестн. СГАУ: Сер. Актуальные проблемы радиоэлектроники. 2003. С. 30–35. 14. Посмитный Е.В., Медовщиков М.И. Методика адаптивного управления транспортными потоками высокой интенсивности в условиях города на основе мезо-модели динамики с применением генетических алгоритмов // Науч. журн. КубГАУ. 2012. № 84 (10). С. 1–11. URL: http://ej.kubagro.ru/2012/10/pdf/ 75.pdf (дата обращения: 10.12. 2017). 15. Пуртов А.М. Использование таксономии при анализе задержек в автотранспортных сетях // Вестн. СибАДИ. 2013. № 2 (30). С. 73–78. 16. Martin Treiber. General Lane-Changing Model for Car-Following Models. URL: www.mtreiber.de/publications/ MOBILTRB.pdf (дата обращения: 10.12. 2017). 17. Гасников А.В., Кленов С.Л. и др. Введение в математическое моделирование транспортных потоков. М.: Изд-во МЦНМО, 2013. C. 107–113. |
 = {Y1(t), Y2(t), …, Yi(t), …, Ym(t)}, компоненты которого обозначают количество транспортных средств в данный момент на отдельных подходах к перекрестку [14]. На состояние ТрП оказывает воздействие управление
= {Y1(t), Y2(t), …, Yi(t), …, Ym(t)}, компоненты которого обозначают количество транспортных средств в данный момент на отдельных подходах к перекрестку [14]. На состояние ТрП оказывает воздействие управление  выбранное из множества возможных управлений. Таким образом, в следующий момент времени состояние потока изменится под влиянием управляющего воздействия
выбранное из множества возможных управлений. Таким образом, в следующий момент времени состояние потока изменится под влиянием управляющего воздействия  :
:  = f{
= f{ ;
;  .
. к цели управления, то есть к требуемому значению
к цели управления, то есть к требуемому значению  предельное значение эффективности определяется равенством этих значений.
предельное значение эффективности определяется равенством этих значений. ,
, – задержка ТП на i-м перекрестке для встречного направления.
– задержка ТП на i-м перекрестке для встречного направления.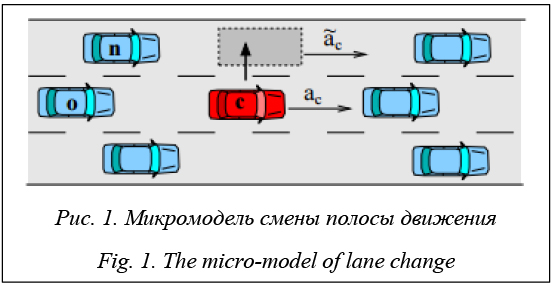
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4392 |
Версия для печати Выпуск в формате PDF (29.74Мб) |
| Статья опубликована в выпуске журнала № 1 за 2018 год. [ на стр. 19-24 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Системный анализ объектов транспортной инфраструктуры в геоинформационной среде
- Вероятность ошибочных идентификаций в транспортных системах
- Технология и средства автоматизации имитационного моделирования процессов управления региональной безопасностью
- Построение модели транспортной инфраструктуры на основе пространственно-спектральной аэрокосмической информации
- Пространственно-временная модель транспортной сети системы материально-технического обеспечения эксплуатации группировки радиоэлектронных средств
Назад, к списку статей