Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Методика оценки качества гетерогенных робототехнических комплексов моделью Banker-Charnes-Cooper
Аннотация:В статье предложена методика оценки и определения направлений повышения качества гетерогенных робототехнических комплексов, состоящая из частных методик и основанная на разработанном на базе методологии анализа среды функционирования комплексе математических моделей. Одной из особенностей методологии анализа среды функционирования по оценке эффективности систем является то, что исследуемый объект обладает множеством входных и выходных разнородных параметров и решение задачи осуществляется в условиях этой разнородности, что имеет особое значение при гетерогенности комплекса. Посредством сложных математических преобразований моделирование на базе анализа среды функционирования дает возможность «сравнивать несравнимое». Методика оценки качества гетерогенных робототехнических комплексов предполагает определенный ряд факторов, описанных в статье, и строится на основе разработанных математических моделей оценки качества гетерогенных робототехнических комплексов и теоретических положений о критериях качества исследуемого объекта. В статье показано: если в соответствии с ограничениями необходимо добиться максимального уровня значений выходных показателей при фиксированных значениях показателей входа, выбирается разработанная модель анализа гетерогенных робототехнических комплексов, основанная на выходной модели Banker-Charnes-Cooper методологии анализа среды функционирования. Данная математическая модель позволяет проводить анализ качества гетерогенных робототехнических комплексов в условиях возможности сокращения затрат при фиксированных значениях выходных характеристик. Если определение направлений повышения качества гетерогенных робототехнических комплексов осуществляется в условиях возможности одновременного изменения значений как входных, так и выходных параметров, выбирается модель синтеза, основанная на аддитивной модели методологии анализа среды функционирования.
Abstract:The paper proposes a method for evaluating and determining the ways for improving the quality of heterogeneous robotic systems that consists of private methods. It is based on the developed complex of mathematical models that is based on the methodology of the data envelopment analysis. One of the features of the data envelopment analysis by evaluating complex system effectiveness is the fact that the object under study has a variety of input and output heterogeneous parameters. In this case, the solution of the problem is carried out under conditions of heterogeneity of the parameters, which is of particular importance in the case of system heterogeneity. After complex mathematical transformations, modeling based on the data envelopment analysis makes it possible to “compare something noncomparable”. The method for evaluating the quality of heterogeneous robotic systems supposes a certain number of factors described in the paper. It is based on the developed mathematical models for evaluating the quality of heterogeneous robotic systems and theoretical provisions on the quality criteria the object under study. The paper shows that if the constraints make it necessary to achieve the maximum level of the output indices at fixed values of the entry indicators, then we should choose the developed model for the analysis of heterogeneous robotic systems based on the Banker-Charnes-Cooper output model of the data envelopment analysis. This mathematical model allows analyzing the quality of heterogeneous robotic systems in conditions of possible cost reduction with fixed values of output characteristics. If the determination of the ways of improving the quality of heterogeneous robotic systems is carried out under conditions of possible simultaneous changing of the values of both input and output parameters, then we choose a synthesis model based on the additive model of methodology of the data envelopment analysis.
| Авторы: Селиверстов Д.Е. (seliverstov_dmitriyy@rambler.ru) - Военная академия Ракетных войск стратегического назначения им. Петра Великого (преподаватель), Балашиха, Россия, кандидат технических наук, Русаков К.Д. (rusakov.msk@yandex.ru) - Институт проблем управления им. В.А. Трапезникова РАН (младший научный сотрудник), Москва, Россия, Хиль С.Ш. (skhill@mail.ru ) - Московский авиационный институт (национальный исследовательский университет) (доцент), Москва, Россия, кандидат технических наук, Савилкин С.Б. (savilkin@mail.ru) - Московский авиационный институт (национальный исследовательский университет), Волоколамское шоссе, 4, г. Москва, 125993, Россия (доцент, старший научный сотрудник), г. Москва, Россия, кандидат физико-математических наук | |
| Ключевые слова: гетерогенные робототехнические комплексы, анализ среды функционирования, оценка качества, технический уровень, banker-charnes-cooper |
|
| Keywords: heterogeneous robotic systems, data envelopment analysis, quality evaluation, technical level, banker-charnes-cooper model |
|
| Количество просмотров: 5594 |
Статья в формате PDF Выпуск в формате PDF (22.98Мб) |
В процессе моделирования экстремальных задач гетерогенной робототехники особое внимание уделяется оценке качества таких сложных и новых систем. Для анализа и синтеза гетерогенных робототехнических комплексов (ГРТК) необходимо использовать современные эффективные математические модели, учитывающие все многообразие показателей их характеристик. В настоящее время методология анализа среды функционирования (АСФ) представляет собой продуктивный инструмент для анализа деятельности сложных систем. Одна из особенностей методологии АСФ по оценке эффективности сложных систем – исследуемый объект обладает множеством входных и выходных разнородных параметров и решение задачи осуществляется в условиях этой разнородности, что имеет особое значение при гетерогенности комплекса. Посредством сложных математических преобразований АСФ-моделирование дает возможность сравнивать несравнимое. Данный подход был впервые предложен в рабо- тах [1, 2]. Методология АСФ представляет собой результат междисциплинарных исследований, про- водимых последние десятилетия в области экономики, системного анализа и исследования операций [3]. Она основывается на фундаментальных положениях математической экономики – теории производственных функций, модели производства Леонтьева, оптимальности Парето, определении эффективности в моделях Фаррела [4]. При этом АСФ-подход реализован в математическом программировании, исследовании операций, теории оптимизации, ПО [5, 6]. В России методология АСФ мало известна. Тем не менее, применение предложенного математического аппарата для оценки эффективности функционирования сложных систем способно обеспечить решение сложно формализуемых технических задач, в частности, по объективной комплексной оценке качества ГРТК. Оценка и определение направлений повышения качества
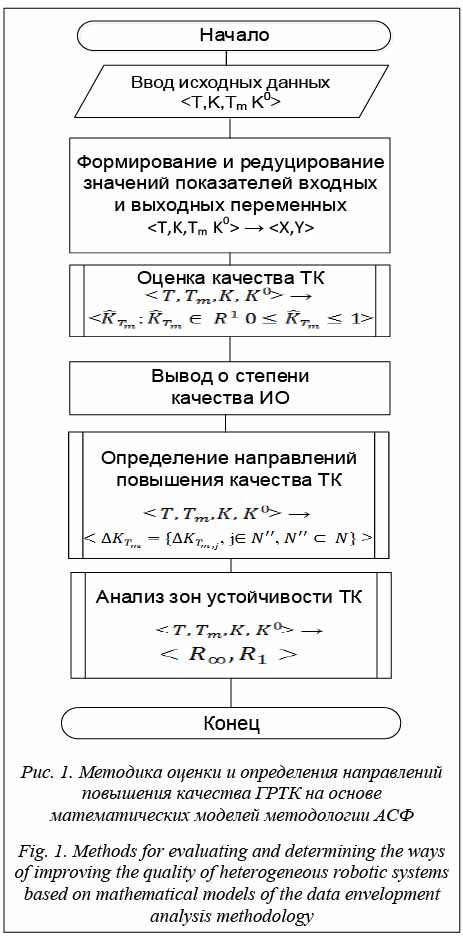
Разработанная методика включает частные методики – оценки качества ГРТК и определения направлений повышения качества ТК. Методика оценки качества ГРТК предполагает: - определение качества ГРТК в условиях ограничений, накладываемых на значения входных и выходных показателей, то есть состояния исследуемого объекта (X0, Y0) в n-мерном пространстве значений m + r входов и выходов; - определение необходимости увеличения (уменьшения) значений показателей качества нека- чественных (относительно качественных) объектов. Исследуется множество объектов (ГРТК) T = {T1, T2, …, Tn}, представленных совокупностью входных и выходных показателей качества K = {K1, …, Km, …, Kr}, в которых все входные и выходные данные линейно независимы (в том числе определяемые по порядковой шкале).
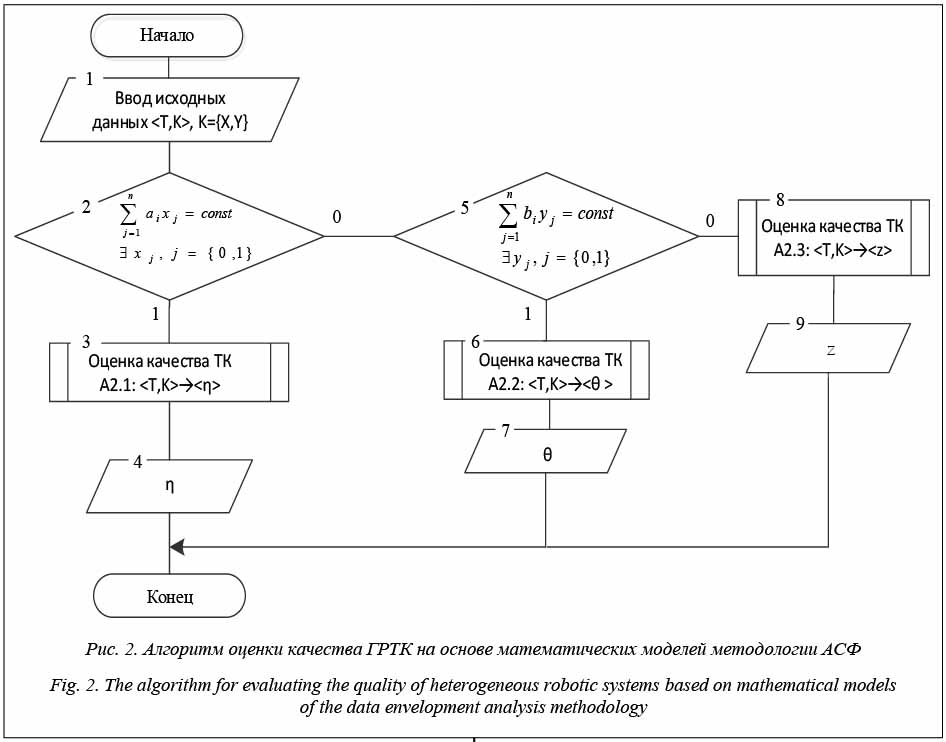
Из условий задачи анализа ГРТК следует: если в соответствии с ограничениями необходимо добиться максимального уровня значений выходных показателей при фиксированных значениях показателей входа X = (x1, x2, …, xn) = const, то выбирается разработанная модель анализа ГРТК, основанная на выходной модели BCC методологии АСФ [3]. Для оценки качества ГРТК в условиях ограничений, накладываемых на значения показателей вектора выходных переменных Y = (y1, y2, …, yn) = = const, и возможности изменения значений показателей входа выбирается модель анализа ГРТК, основанная на входной модели BCC методологии АСФ [3, 12]. Данная математическая модель позволяет проводить анализ качества ГРТК в условиях возможности сокращения затрат при фиксированных значениях выходных характеристик. Результатом является перевод исследуемого объекта (X0, Y0) из состояния в состояние θ при Y = (y1, y2, …, yn) = const. Если оценка качества ГРТК осуществляется в условиях возможности одновременного изменения значений как входных, так и выходных показателей качества ТК, выби- рается математическая модель анализа ГРТК, ос- нованная на аддитивной модели методологии АСФ [3]. В этом случае проводится оценка качества ГРТК с ориентацией на последующее решение задачи синтеза по входным и выходным показателям качества ГРТК одновременно [13]. Результатом является перевод исследуемого объекта (X0, Y0) из состояния в состояние z. Если в результате решения задач анализа качества ТК установлено, что оптимальное значение искомого функционала равно единице, исследуемый ТК является качественным. При этом значения оптимальных дополнительных переменных равны нулю (S-* = S+* = 0). Если исследуемый объект является некачественным (относительно качественным), на основании результатов решения задачи оценки качества ТК осуществляется переход к решению задачи определения направлений повышения его качества. Методика определения направлений повышения качества ТК предполагает определение значений оптимальных дополнительных переменных S–, S+ для некачественного (относительно качественного) объекта в условиях ограничений, накладываемых на значения входных или выходных показателей (отсутствия ограничений), то есть выбор направлений увеличения (уменьшения) значений показателей качества ГРТК в n-мерном пространстве значений m+r входов и выходов. Исследуется множество объектов T = (T1, T2, …, Tn), представленных совокупностью входных и выходных показателей качества K = {K1, …, Km, …, Kr}, в которых все входные и выходные данные линейно независимы (в том числе определяемые по порядковой шкале).
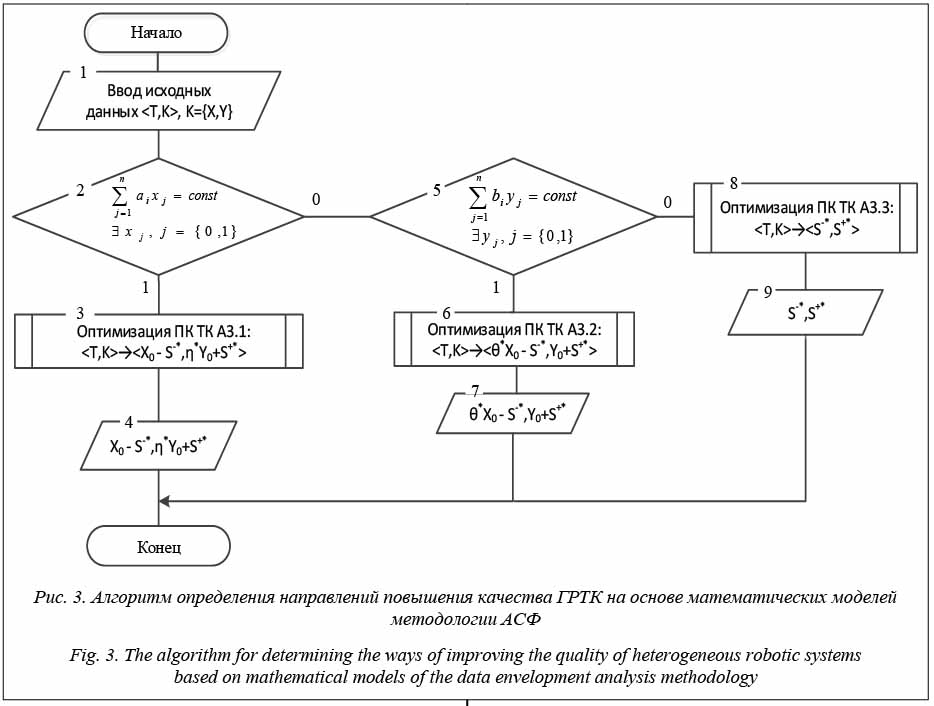
На основании результатов оценки качества ГРТК осуществляется поиск направлений движения в n-мерном пространстве входных и выходных параметров, позволяющих осуществить перевод объекта из состояния некачественного в состояние качественного. Из условий задачи определения направлений повышения качества ГРТК следует: если в соответствии с требованиями необходимо добиться максимального уровня значений выход- ных показателей при фиксированных значениях показателей входа X = (x1, x2,…, xn) = const, выбирается модель синтеза, основанная на выходной модели BCC методологии АСФ [3]. Результатом является перевод исследуемого объекта (X0, Y0) из состояния в состояние (X0 – S-*, η*Y0 + S+*) при X = (x1, x2,…, xn) = const. Для решения задачи в условиях ограничений, накладываемых на значения показателей вектора выходных переменных Y = (y1, y2,…, yn) = const, и возможности изменения значений показателей входа выбирается модель, основанная на входной модели BCC методологии АСФ [3, 9]. Результатом является перевод исследуемого объекта (X0, Y0) из состояния в состояние (θ*X0 – S–*, Y0 + S+*) при Y = (y1, y2, …, yn) = const. Если определение направлений повышения качества ГРТК осуществляется в условиях возможности одновременного изменения значений как входных, так и выходных параметров, выбирается модель синтеза, основанная на аддитивной модели методологии АСФ [3, 7]. Результатом является перевод исследуемого объекта (X0, Y0) из состояния (T, K) в состояние (Sk-, Si+). Заключение Разработанная методика построена на ранее проведенных исследованиях и разработанных математических моделях по оценке и определению направлений повышения качества ГРТК. Данная методика позволяет проводить оценку качества ГРТК и определять направления его повышения в условиях ограничений, накладываемых на зна- чения вектора входных переменных, вектора выходных переменных, а также отсутствия ограничений. Литература 1. Banker R.D., Chang H. and Cooper W.W. Equivalence and implementation of alternative methods for determining returns to scale in data envelopment analysis. Europ. J. of Operation Research, 1995, vol. 89, pp. 473–481. 2. Banker R.D., Charnes A., and Cooper W.W. Some models for estimating technical and scale inefficiencies in data envelopment analysis. Management Science, 1984, vol. 30, pp. 1078–1092. 3. Кривоножко В.Е., Лычев А.В. Моделирование и анализ деятельности сложных систем М.: Ленанд, 2013. 256 с. 4. Кривоножко В.Е., Пропой А.И., Сеньков Р.В., Родченков И.В., Анохин П.М. Анализ эффективности функционирования сложных систем // Автоматизация проектирования. 1999. № 1. С. 2–7. 5. Сухов А.В., Решетников В.Н., Савилкин С.Б. Мониторинг частотного ресурса геостационарных спутников-ретранс- ляторов с использованием энтропии покрытия // Программные продукты и системы. 2017. № 1. С. 119–123. DOI: 10.15827/0236-235X.117.119-123. 6. Rozhnov A.V., Lobanov I.A. Investigation of the joint semantic environment for heterogeneous robotics. Proc. 10th Intern. Conf. MLSD, 2017. URL: http://ieeexplore.ieee.org/document/ 8109678/ (дата обращения: 09.09.2018). DOI: 10.1109/mlsd.2017. 8109678. 7. Баландин А.Е., Звеков С.Г., Селиверстов Д.Е. Применение технологии анализа среды функционирования при подготовке операторов БПЛА // Проблемы совершенствования робототехнических и интеллектуальных систем летательных аппаратов: сб. докл. Х Всерос. науч.-технич. конф. 2015. С. 28–32. 8. Рожнов А.В., Антиох Г.М., Селиверстов Д.Е., Куб- лик Е.И. Системная интеграция направлений научной деятельности в условиях формирования прединтеллектуальной инфраструктуры // Информационно-измерительные и управляющие системы. 2014. Т. 12. № 11. С. 59–63. 9. Селиверстов Д.Е., Князев В.В. Модель оценки эффективности подготовки операторов робототехнических комплексов военного назначения // Информатика, вычислительная техника и управление: сб. науч. тр. 2015. С. 180–184. 10. Шукшунов В.Е., Циблиев В.В., Потоцкий С.И., Безруков Г.В., Душенко А.Г., Жук Е.И., Зубов Н.Е., Макаров А.М., Наумов Б.А., Фоменко В.В. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации. М.: Машиностроение, 2005. 384 с. 11. Каляев А.И., Рубцов И.В. Боевым роботам нужна программа // Национальная оборона. 2012. № 8. С. 34–48. 12. Charnes A., Cooper W.W. and Rhodes E. Measuring the efficiency of decision making units. Europ. J. of Operation Research, 1978, vol. 2, pp. 429–444. DOI: 10.1007/BF02282039. 13. Генов А.А., Русаков К.Д., Хиль С.Ш. Идентификация состояния сложной технической системы в условиях неопределенности измерительной информации // Программные продукты и системы. 2017. Т. 30. № 3. С. 373–377. DOI: 10.15827/0236-235X.119.373-377. References
|
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4531 |
Версия для печати Выпуск в формате PDF (22.98Мб) |
| Статья опубликована в выпуске журнала № 4 за 2018 год. [ на стр. 723-727 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик: