Journal influence
Bookmark
Next issue
An algorithm for ensuring the required level of stability of control of an unmanned aerial vehicle in the conditions of counteraction
Abstract:The paper proposes an algorithm for ensuring the required stability level of controlling an unmanned aerial vehicle (UAV) in the conditions of counteraction. It is assumed that the external influence includes both intentional de-structive influences and unintended environmental influences. The sustainable control of UAVs is considered as the ability of the governing bodies to perform their functions in a complex sharply changing environment under conditions of interference, enemy influence (fire, electronic, etc.) and technical failures, keeping the values of all control indicators within the established limits, respectively. The paper considers the means of fire and physical destruction, electronic suppression, as well as means of functional damage by electromagnetic and laser radiation as deliberate destructive environmental influences that threaten to disrupt the stability of UAV control during automatic control. Depending on the probability of defeat-ing a UAV after deliberate destructive influence of the external environment, there are formed zones that charac-terize the influence of influence means on the level of UAV combat capability. The determined acceptable level of stable control probability meets the requirements of a UAV combat-ready state. In order to ensure the required stability level of UAV control, the author used the principle of adaptive control that consists in changing the parameters of the UAV movement to implement the possibility of overflying danger-ous zones. The calculation of the UAV motion control parameters used a mathematical model of the dynamics of the UAV lateral movement. The UAV motion control parameters are formed as a sum of program and corrective control calculated through the required motion parameters of the UAV. The proposed algorithm takes into account the possible intentional destructive impact of the external environ-ment. It can be implemented using microcontrollers of modern UAVs and does not involve making changes to their design. The implementation of the algorithm in UAV automated control systems will effectively solve the tasks of aerial reconnaissance in counteraction conditions to calculate the required motion parameters and to con-trol the UAV corresponding to the current situation.
Аннотация:Предлагается алгоритм обеспечения требуемого уровня устойчивости управления беспилотным летательным аппаратом в условиях противодействия. Под внешним воздействием понимаются как преднамеренные деструктивные воздействия внешней среды, так и непреднамеренные. Устойчивое управление беспилотным летательным аппаратом рассматривается как способность управляющих органов выполнять свои функции в сложной, резко меняющейся обстановке, в условиях помех, воздействия противника (огневого, радиоэлектронного и др.) и технических отказов, сохраняя в установленных пределах значения всех показателей управления соответственно. В качестве преднамеренных деструктивных воздействий внешней среды, угрожающих устойчивости управления беспилотным летательным аппаратом при автоматическом управлении, рас-смотрены средства огневого и физического поражения, радиоэлектронного подавления, а также функционального поражения электромагнитным и лазерным излучением. В зависимости от вероятности поражения беспилотного летательного аппарата в результате преднамеренного деструктивного воздействия внешней среды сформированы зоны, характеризующие влияние средств воздействия на уровень боеспособности беспилотного летательного аппарата. Определен допустимый уровень вероятности устойчивого управления, удовлетворяющий требованиям его боеспособного состояния. С целью обеспечения требуемого уровня устойчивости управления беспилотным летательным аппаратом использован принцип адаптивного управления, заключающийся в изменении параметров его движения, для реализации возможности облета опасных зон. Вычисление параметров управления движением беспилотного летательного аппарата осуществляется с использованием математической модели динамики его бокового движения. Параметры управления движением беспилотного летательного аппарата формируются в виде суммы программного управления и корректирующего, вычисленных через требуемые параметры движения аппарата. Предложенный алгоритм учитывает возможное преднамеренное деструктивное воздействие внешней среды, может быть реализован с помощью микроконтроллеров современных беспилотных летательных аппаратов и не предполагает внесения изменений в их конструкцию. Реализация алгоритма в автоматизированных системах управления беспилотным летательным аппаратом позволит эффективно решать задачи воздушной разведки в условиях противодействия для вычисления требуемых параметров движения и соответствующего текущей обстановке управления.
| Authors: Belonozhko D.G. (staeer@rambler.ru) - Krasnodar Higher Military School named after Army General S.M. Shtemenko (Adjunct), Krasnodar, Russia | |
| Keywords: automated management, mathematical model, unmanned aerial vehicle, a control system, algorithm |
|
| Page views: 2057 |
PDF version article |
Анализ применения беспилотных летательных аппаратов (БЛА) в современных боевых условиях показал, что эффективность их использования достигается за счет совершенствования конструкции БЛА (аппаратной части) и внедрения интеллектуальных автоматизированных систем. Такой подход дает возможность построить управление, обладающее свойствами адаптации к изменяющимся условиям функционирования БЛА [1]. Сегодня очевидна необходимость применения комплексов с БЛА в условиях ведения боевых действий в локальных военных конфликтах. Это обусловлено, во-первых, оперативностью получения с их помощью разведывательной информации, во-вторых, объективными требованиями к организации взаимодействия пунктов управления, средств разведки и огневых средств поражения. Перспективным направлением развития теории применения БЛА является включение в ее состав моделей, методов и алгоритмов формирования оптимального программного управления БЛА, непосредственно связанных с задачами их использования [2]. Это, в свою очередь, обусловливает необходимость разработки алгоритмов управления БЛА, обеспечивающих требуемый уровень устойчивости управления им в условиях противодействия. Устойчивость управления определяется способностью управляющих органов выполнять свои функции в сложной, резко меняющейся обстановке в условиях помех и массированного воздействия противника. Как правило, устойчивость управления является интегральным свойством, определяемым живучестью, помехоустойчивостью и надежностью, под которым понимается способность осуществлять управление в условиях воздействия всех видов оружия (огневого, радиоэлектронного, информационного) и технических отказов, сохраняя в установленных пределах значения всех показателей управления соответственно [3]. Принятые на вооружение комплексы с БЛА оснащены системой управления (СУ), позволяющей реализовать следующие режимы функционирования: - полуавтоматический – по командам, передаваемым с наземного дистанционного пункта управления (НДПУ) по каналу командно-телеметрической радиолинии (КТР) для изменения направления и/или высоты полета БЛА; - автоматический – с возможностью корректировки программы-задания по командам с НДПУ; - автономный – по введенной программе-заданию в режиме радиомолчания бортовых средств передачи данных. В существующих автоматизированных СУ БЛА функции ПО направлены на выполнение типовых операций, а решение логико-аналитических задач, связанных с принятием решений по изменению траектории полета в условиях воздействия, осуществляется расчетом комплекса. Для оценки информации, получаемой по радиоканалу, в условиях неопределенности от специалистов требуются высокая квалификация, интуиция и оперативность принятия решений. В процессе принятия решений расчетом БЛА в условиях неоднозначности оценки ситуации могут возникнуть ошибки в выборе приоритетов при выполнении полетного задания. Кроме того, оператор БЛА способен в относительно короткий период времени воспринять ограниченное число объектов [4]. В условиях резко меняющейся обстановки, а также при реализации способов противодействия, связанных с набором высоты и увеличением скорости полета, ряд параметров БЛА, таких как температура и обороты двигателя, состояние связного и навигационного оборудования, факторы внешней среды (скорость ветра и атмосферные осадки), в силу ограниченности человеческих способностей могут быть не учтены или упущены из виду. Подобные упущения и ошибки управления могут привести к выходу из строя оборудования БЛА или его повреждению [5]. Полная автоматизация процесса выполнения полетного задания в условиях противодействия в ближайшей перспективе маловероятна, так как полетная программа не учитывает влияние внешних факторов. Поэтому в статье будет рассмотрен процесс автоматизированного управления одним БЛА. Методы решения задачи управления БЛА в условиях противодействия Представляется целесообразной разработка алгоритма управления БЛА, обеспечивающего требуемый уровень устойчивости в условиях противодействия. Решение данной задачи состоит в разработке систем управления, обеспечивающих в режиме реального времени автоматический и автоматизированный режимы управления БЛА и способных выполнять задачи в условиях противодействия [6, 7]. Анализ отечественной литературы в данной области показывает, что в подавляющем числе работ задача по обеспечению устойчивости управления БЛА рассматривается применительно к совершенствованию протоколов маршрутизации в телекоммуникационных сетях, обеспечению информационной живу- чести БЛА и не имеет отношения к управле- нию режимами функционирования и полетом БЛА [8, 9]. Решение задачи формирования запретных зон полета рассматривалось в работах [10–12]. При этом вопросы формирования маршрутов полета по управлению пилотируемыми БЛА с обходом зон противника описаны достаточно подробно. Однако в подавляющем большинстве работ не уделяется внимание боевому потенциалу противника и оценке вероятности поражения БЛА. В работе [13] алгоритм формирования безопасной траектории основан на использовании в качестве прототипа метода пропорционального наведения. Данный метод применим при допущении о постоянно действующей объектовой системе противовоздушной обороны с известными координатами местоположения зенитно-ракетного комплекса (ЗРК) и характеристиками зоны его поражения. Однако исходя из опыта применения необходимо изменять маршрут БЛА в зависимости от текущей резко меняющейся тактической обстановки. Данный метод не подходит для БЛА планерного типа, обладающих невысокими летными характеристиками относительно ракет ЗРК. Опыт боевого применения БЛА показывает, что для его эффективного использования первостепенное значение имеют обеспечение непрерывной устойчивой связи с ним, а также формирование маршрутов полета в обход местоположения средств противовоздушной обороны и радиоэлектронного подавления [1, 14]. Наиболее близки к решению подобной задачи авторы работ [10–12], в которых применен метод теории графов и алгоритмов поиска кратчайших путей. В работе [11] применен усовершенствованный алгоритм Дейкстры, который, помимо кратчайшего маршрута полета, поз- воляет формировать еще и множество дополнительных. Данный алгоритм является вы- числительно сложным в условиях реального времени, так как время его работы пропорционально числу сеток на карте. При этом в работах [10–12] не рассматриваются учет боевого потенциала противника и оценка вероятности поражения БЛА. В работе [15] движение летательного аппарата разделено на боковое и продольное при допущениях о несущественности аэродинамических, инерционных и кинематических связей при малых угловых скоростях движения. Решение задачи управления с использованием нечеткого регулятора для продольного канала движения БЛА по его упрощенной динамической модели, когда летательный аппарат стабилизирован по крену, представлено в [16]. Для решения задачи автоматического управления, обеспечивающего требуемый уровень устойчивости управления БЛА в зависимости от значения вероятности его поражения, предлагается воспользоваться вышеуказанными подходами, связанными с формированием управления летательным аппаратом, исходя из дальнейших целей полета. Постановка задачи управления БЛА в условиях противодействия Применительно к объекту исследования в данной работе предложено под внешним воздействием понимать как преднамеренные деструктивные [17, 18], так и непреднамеренные воздействия внешней среды [19]. В качестве преднамеренных деструктивных воздействий внешней среды, угрожающих устойчивости управления БЛА при автоматическом управлении, рассматриваются средства огневого и физического поражения, радиоэлектронного подавления, а также функционального поражения электромагнитным и лазерным излучением. Данные факторы могут быть формализованы через соответствующий показатель – вероятность поражения БЛА в результате деструктивного преднамеренного воздействия внешней среды PДВ. Показатель эффективности противодействия внешним воздействиям, характеризующий вероятность устойчивого управления БЛА, представим в виде
– множества параметров внешнего воздействия: J – способы применения средств преднамеренного деструктивного воздействия внешней среды; K – способы непреднамеренного воздействия внешней среды; H – боевые потенциалы средств поражения противника; – множество параметров БЛА: S – множество идентификации состояний БЛА при выполнении задания в процессе управления, сбора, обработки и передачи информации; – множества параметров противодействия внешним факторам: U – параметры управления БЛА; WВВ – способы противодействия внешним воздействиям; – модели: MВВ – модели воздействия внешней среды на БЛА; – временные параметры: T – период времени выполнения задания; tВВ – время нахождения БЛА в зоне воздействия внешней среды; – вероятностные характеристики: PВВ = = PДВ + PНВ – вероятность поражения отдельного БЛА в результате преднамеренного деструктивного воздействия PДВ и непреднамеренного воздействия внешней среды PНВ. Для эффективного выполнения задач в условиях противодействия необходимо обеспечить требуемый уровень устойчивости управления БЛА:
При формировании набора параметров прежде всего должны быть учтены ограниче- ния j к требуемому уровню вероятности устойчивого управления БЛА:
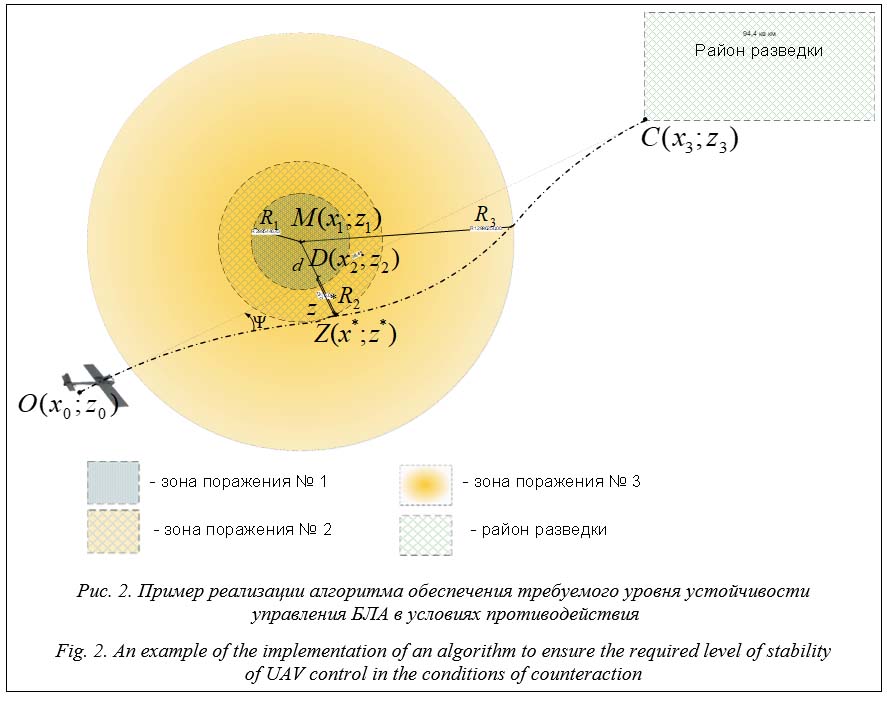
где В выражении (1) ограничения к уровню вероятности устойчивого управления БЛА обусловлены требованиями к уровню боеспособности БЛА в условиях преднамеренного деструктивного воздействия. В работах [20, 21] выделяют три уровня боеспособности: боеспособное, ограниченно боеспособное и небоеспособное состояния, для которых в зависимости от вероятности поражения БЛА сформируем зоны поражения: - в зоне № 1 вероятность поражения БЛА PДВ ≥ 0.7; - в зоне № 2 вероятность поражения БЛА 0.4 ≤ PДВ ≤ 0.7; - в зоне № 3 вероятность поражения БЛА PДВ ≤ 0.4. В зависимости от значения вероятности нарушения управления в [21] выделяют следующие виды устойчивости управления: устойчивое управление, управление затруднено, управление нарушено и управление сорвано:
Допустимыми для боеспособного состояния в данном случае являются значения вероятности устойчивого управления, удовлетворяющие первым двум неравенствам системы (2): - при устойчивом управлении PУУ ≥ 0.8 достигается максимальная реализация боевого потенциала БЛА; - при 0.6 ≤ PУУ ≤ 0.8 обеспечивается боеспособное состояние БЛА (боевой потенциал сохраняется на уровне не менее 70 % от первоначального). Решение задачи управления БЛА в условиях противодействия По реализуемому принципу управление траекторным движением БЛА в процессе вы- полнения задачи в зависимости от обстановки может быть следующим: - командным (по командам, поступающим с НДПУ); - программным (с априорным програм- мным наведением) – вычисление программ движения и управления, ввод этой информации в виде полетного задания осуществляется заблаговременно, в процессе полета траектория сформирована и задается на борту в виде временных зависимостей; - адаптивным терминальным, при котором управление осуществляется для достижения конечного результата (с учетом ограничений) [23]. Кроме траекторного управления, как правило, осуществляются угловая стабилизация и управление угловым положением БЛА. Важнейшими задачами при создании такого управления БЛА являются обеспечение устойчивости управления на всех режимах полета с учетом возможных возмущений и отклонений исходных данных, достижение точности реализации целевого назначения БЛА, обеспечение живучести БЛА и управление при отказах, вызванных внешним воздействием, в системе управления [24]. В существующих системах управления БЛА в автономном и автоматическом режимах управления применяется программное управление, которое не учитывает влияние внешних возмущений [7]. Задачей системы управления на пилотажном уровне является формирование управляющих сигналов для рулевых органов БЛА, обеспечивающих достижение и выдерживание заданных сил и моментов [25]. Критерии оптимизации управляющих сигналов пилотажного комплекса формируются в отклонениях действительного состояния БЛА от заданного (эталонного) [26]. Такое управление принято считать программным (априорным). К недостаткам программных систем управления относятся [23]: - низкая оперативность подготовки к выполнению новой задачи в условиях изменения целевой обстановки; - ограниченная точность управления; - дополнительный расход энергетических ресурсов. От этих недостатков практически свободны терминальные системы, сущность которых заключается в том, что задача управления решается бортовым вычислителем в процессе полета БЛА. При этом в систему управления вво- дятся информация о координатах цели, старта, моделях внешней среды, характеристиках БЛА и условиях полета, а также простейшие программы автоматического полета (взлет, посадка, аварийные режимы). Принцип терминального (текущего итерационного) управления движением заключается в вычислении требуемого управления U*(t) в процессе активного полета на основании информации о текущих параметрах движения и цели управления. Из этого следуют свойства адаптации управления к реальным условиям и конечным целям полета при воздействии возмущений и с учетом ограничений, накладываемых на управление и траекторию движения. Для реализации возможности облета зон поражения управление движением БЛА необходимо формировать в виде суммы програм- много управления и корректирующего управления [23]:
где UПЗ(t) – программное управление, предусмотренное полетным заданием; zВВ(t) – рассогласование траектории движения, вызванное необходимостью облета зон поражения средств внешнего воздействия. При отсутствии внешних возмущений, zВВ(t) = 0, БЛА движется по программной траектории:
Математическая модель динамики бокового движения БЛА При разработке алгоритма использована математическая модель бокового движения центра масс БЛА в горизонтальной плоскости, описанная в работе [15]. В ней синтез алгоритма стабилизации бокового движения БЛА, то есть обеспечение стабилизации скорости полета Vk = V*k и путевого угла Y = Y*, сводится к задаче определения управления как функции от параметров движения БЛА R = f(Vk, Y, x, z) и ga = f(Vk, Y, x, z):
где определены следующие показатели: – параметры управления (управляемые пе- ременные): R – сила тяги БЛА, ga – скоростной угол крена; – параметры движения: Vk – земная скорость полета БЛА, Y – угол пути, x, z – координаты БЛА в горизонтальной плоскости; – параметры БЛА: m – масса БЛА, S – характерная площадь обтекания БЛА; – параметры воздушной среды: cx, cy – безразмерные коэффициенты аэродинамических сил, С целью облета зоны поражения средств противодействия автоматическое управление БЛА по курсу можно осуществлять путем создания управляющего момента отклонением руля направления или флаперонов либо отклонением руля направления и флаперонов одновременно [27]. Преобразование (5) позволяет выразить параметры управляющего воздействия u1 = R (сила тяги) и u1 = ga (скоростной угол крена) через параметры движения БЛА [15]:
Для решения задачи нахождения управления в рассматриваемой нелинейной модели БЛА с двумя каналами управления широко используются различные модификации регуляторов: пропорциональные, интегральные, дифференциальные и их модификации [28, 29]. Результаты Рассмотрим результаты работы алгоритма управления БЛА, обеспечивающего требуемый уровень устойчивости управления им в условиях противодействия. При оценке траектории полета БЛА могут быть выявлены следующие варианты. · БЛА находится в зоне № 1, вероятность поражения БЛА PДВ ≥ 0.7. Для облета зоны поражения при выявлении пересечений траектории полета БЛА с зоной поражения № 1 формируется управление полетом БЛА согласно выражению (3). Для этого в блоке № 13 определяется величина рассогласования траектории, по которой в блоке № 14 вычисляются требуемые параметры движения БЛА по новой траектории. · БЛА находится в зоне № 2, вероятность поражения БЛА 0.4 ≤ PДВ ≤ 0.7. Для облета зоны поражения при выявлении пересечений · БЛА находится в зоне № 3, вероятность поражения БЛА PДВ ≤ 0.4. В данном случае средства преднамеренного воздействия не ока- жут значительного влияния на уровень боеспособности БЛА, то есть получаем выраже- ние (4). При отсутствии пересечений траектории полета БЛА с зоной поражения № 2 в блоке № 7 осуществляется вывод значения поправки к траектории zВВ = 0. · БЛА находится вне зоны действия средств поражения. В данном случае предполагается, что средства преднамеренного воздействия не окажут влияния на уровень боеспособности БЛА, то есть в отсутствие внешних возмущений получаем выражение (4). При отсутствии пересечений траектории полета БЛА с зоной поражения № 3 в блоке № 4 осуществляется вывод значения поправки к траектории zВВ = 0.
В отличие от существующих предложенный алгоритм позволяет вычислять параметры движения и вырабатывать соответствующее текущей обстановке управление, обеспечивающее требуемый уровень устойчивости управления БЛА в условиях противодействия. В алгоритме использована известная модель бокового движения БЛА [15] для вычисления параметров движения БЛА и выработки соответствующего управления, обеспечивающего требуемый уровень устойчивости управления БЛА в условиях воздействия внешней среды. Заключение Разработан алгоритм управления БЛА, обеспечивающий требуемый уровень устойчивости в условиях противодействия. В отличие от существующих алгоритмов новый подход позволяет учитывать влияние преднамеренного деструктивного воздействия внешней среды при вычислении параметров движения БЛА и соответствующего текущей обстановке управления. Определен допустимый уровень вероятности устойчивого управления, удовле- творяющий требованиям боеспособного состо- яния БЛА. В зависимости от вероятности поражения БЛА в результате преднамеренного деструктивного воздействия внешней среды сформированы зоны, характеризующие влияние средств воздействия на уровень боеспособности БЛА. Для реализации возможности облета зон поражения использован принцип адаптивного управления, заключающийся в изменении траектории движения БЛА с целью обеспечения требуемого уровня устойчивости управления им. Вычисление параметров управления движением БЛА по траектории, обеспечивающей требуемый уровень устойчивости управления, осуществляется с использованием математической модели динамики бокового движения БЛА. Алгоритм позволяет вычислять пара- метры управления движением БЛА, которые формируются в виде суммы программного и корректирующего управления, через требуемые параметры движения в условиях противодействия средств огневого и физического поражения, радиоэлектронного подавления, а также функционального поражения электромагнитным и лазерным излучением. Практическая ценность работы заключается в том, что созданный алгоритм может быть реализован в микроконтроллерах современных БЛА без внесения изменений в их конструкцию. С учетом ранее полученных результатов, защищенных авторскими свидетельства- ми [17–19], реализация алгоритма в бортовых вычислителях СУ БЛА позволит эффективно решать задачи воздушной разведки на больших площадях в условиях противодействия. Полученные выходные данные целесообразно использовать в автономных и автоматизированных системах управления для оценки вероятности выполнения задачи, выработки управления, обеспечивающего требуемый уровень устойчивости управления группой БЛА в условиях воздействия внешней среды. Литература 1. Макаренко С.И. Противодействие беспилотным летательным аппаратам. СПб: Наукоемкие технологии, 2020. 204 с. 2. Моисеев В.С. Основы теории эффективного применения беспилотных летательных аппаратов. Казань, 2015. 444 с. 3. Боговик А.В., Игнатов В.В. Эффективность систем военной связи и методы ее оценки. СПб: ВАС, 2006. 186 с. 4. Евтушенко Е.В., Володин А.Н. Анализ существующих типов беспилотных летательных аппаратов и перспектив их развития // Интеллектуальные системы, управление и мехатроника: Матер. конф. 2017. С. 299–305. 5. Макаренко С.И. Робототехнические комплексы военного назначения – современное состояние и перспективы развития // Системы управления, связи и безопасности. 2016. № 2. С. 73–132. URL: https://sccs.intelgr.com/archive/2016-02/04-Makarenko.pdf (дата обращения: 02.09.2021). 6. Михайлов Р.Л. Радиоэлектронная борьба в Вооруженных силах США. СПб: Наукоемкие технологии, 2018. 131 с. 7. Афонин И.Е., Макаренко С.И., Петров С.В., Привалов А.А. Анализ опыта боевого применения групп беспилотных летательных аппаратов для поражения зенитно-ракетных комплексов системы противовоздушной обороны в военных конфликтах в Сирии, в Ливии и в Нагорном Карабахе // Системы управления, связи и безопасности. 2020. № 4. С. 163–191. DOI 10.24411/2410-9916-2020-10406. 8. Макаренко С.И. Обеспечение устойчивости телекоммуникационной сети за счет ее иерархической кластеризации на области маршрутизации // Тр. учебных заведений связи. 2018. Т. 4. № 4. С. 54–67. DOI: 10.31854/1813-324X-2018-4-4-54-67. 9. Михайлов Р.Л. Помехозащищенность транспортных сетей связи специального назначения. Череповец: Изд-во ЧВВИУРЭ, 2016. 128 с. 10. Васильченко А.С. Методики повышения устойчивости маршрутного управления беспилотным летательным аппаратом в условиях применения средств огневого и радиоэлектронного поражения // Воздушно-космические силы. Теория и практика. 2020. № 13. С. 89–98. URL: https://elibrary.ru/download/elibrary_42641237_99204537.pdf (дата обращения: 02.09.2021). 11. Васильченко А.С., Иванов М.С., Колмыков Г.Н. Формирование маршрутов полета беспилотных летательных аппаратов с учетом местоположения средств противовоздушной обороны и радиоэлектронного подавления // Системы управления, связи и безопасности. 2019. № 4. С. 403–420. URL: https://elibrary.ru/download/elibrary_41567825_30570199.pdf (дата обращения: 02.09.2021). DOI: 10.24411/2410-9916-2019-10416. 12. Васильченко А.С., Иванов М.С., Малышев В.А. Формирование полетных зон беспилотных летательных аппаратов по степени устойчивости управления ими в условиях применения средств противовоздушной обороны и радиоэлектронного подавления // Системы управления, связи и безопасности. 2019. № 4. С. 262–279. URL: https://elibrary.ru/download/elibrary_41567818_57538888.pdf DOI: 10.24411/ 2410-9916-2019-10410. 13. Арапов О.Л., Зуев Ю.С. Формирование опорной траектории, обеспечивающей преодоление опасной зоны // Вестн. МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2015. № 3. С. 14–22. 14. Ростопчин В.В. Ударные беспилотные летательные аппараты и противовоздушная оборона – проблемы и перспективы противостояния // Беспилотная авиация. 2019. C. 1–47. URL: https://www.researchgate.net/publication/331772628_Udarnye_bespilotnye_letatelnye_apparaty_i_protivovozdusnaa_oborona_-problemy_i_perspektivy_protivostoania (дата обращения: 02.09.2021). 15. Куликов Л.И. Синтез автоматического управления посадкой БЛА в боковом канале с применением метода прогнозирования положения относительно программной траектории // Изв. ТулГУ. Технические науки. 2018. № 3. С. 12–25. 16. Карпович Д.С., Шумский А.Н., Сарока В.В. Система управления беспилотным летательным аппаратом с применением теории нечетких множеств // Тр. БГТУ. Физико-математические науки и информатика. 2016. № 6. С. 110–116. 17. Белоножко Д.Г. Программа определения вероятности уничтожения беспилотного летательного аппарата в результате воздействия средств огневого и физического поражения с использованием аппарата нечеткой логики: Свид. о регистр. ПрЭВМ № 2021666604. Рос. Федерация, 2021. 18. Белоножко Д.Г. Программа определения вероятности уничтожения беспилотного летательного аппарата в результате воздействия средств радиоэлектронного подавления с использованием аппарата нечеткой логики: Свид. о регистр ПрЭВМ № 2021666603. Рос. Федерация, 2021. 19. Белоножко Д.Г. Программа оценки вероятности повреждения беспилотного летательного аппарата в результате непреднамеренного воздействия внешней среды с использованием аппарата нечеткой логики: Свид. о регистр. ПрЭВМ № 2021666732. Рос. Федерация, 2021. 20. Анохин В.А., Холуенко Д.В. Методические основы оценки эффективности дезорганизации сетецентрических информационно-управляющих систем // Военная мысль. 2020. № 12. С. 92–98. 21. Анохин В.А., Холуенко Д.В., Громыко Н.М. Оценка эффективности дезорганизации информационно-управляющих систем общевойсковых оперативных и тактических формирований противника (практические аспекты) // Вестн. АВН. 2019. № 3. С. 69–74. 22. Анохин В.А., Высторобский Г.Д., Холуенко Д.В., Громыко Н.М. Оценка боеспособности воинских формирований с учетом эффективности дезорганизации управления // Военная мысль. 2019. № 12. С. 48–56. 23. Половинчук Н.Я. Терминально-оптимальное управление высокоскоростным летательным аппаратом // Иннофорум-2016: Матер. Междунар. науч.-практич. конф. 2016. С. 145–151. 24. Щербатов И.А., Проталинский И.О., Проталинский О.М. Управление группой роботов: компонентный подход // Информатика и системы управления. 2015. № 1. С. 93–104. 25. Сергеев А.А., Филимонов Н.Б. Управление маневром беспилотного летательного аппарата при посадке на подвижную платформу методом «гибких» кинематических траекторий // Изв. вузов. Приборостроение. 2020. Т. 63. № 9. С. 803–812. DOI: 10.17586/0021-3454-2020-63-9-803-812. 26. Веселов Г.Е., Ингабире Алин И.А. Синергетический синтез закона управления БПЛА в условиях ветровых возмущений с входными ограничениями // Изв. ЮФУ. Технические науки. 2020. № 2. С. 101–112. DOI: 10.18522/2311-3103-2020-2-101-112. 27. Анцев Г.В, Биард Р.У., Маклэйн Т. Дорогу увидит летящий // Мир транспорта. 2016. Т. 14. № 5. С. 266–271. 28. Глумов В.М., Пучков А.М., Селезнев А.E. Синтез и анализ алгоритмов управления боковым движением беспилотного летательного аппарата с двумя управляющими поверхностями // Проблемы управления. 2015. № 3. С. 69–78. 29. Брыков Б.А., Лопатин А.Г., Вент Д.П. Имитационное моделирование работы fuzzy ПИ-регулятора // Успехи в химии и химической технологии. 2016. Т. 30. № 4. С. 59–61. References
|
 (1)
(1) (2)
(2)
 (5)
(5) (6)
(6)
| Permanent link: http://swsys.ru/index.php?page=article&id=4880&lang=en |
Print version |
| The article was published in issue no. № 1, 2022 [ pp. 095-105 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Программное обеспечение навыковой системы принятия решений
- Постановка задачи исследования диффузионного перехода через границу шлак-металл в колонном реакторе и алгоритм ее решения
- Экспертно-моделирующие системы в управлении ИТ-инфраструктурой
- Способы реализации алгоритмов интегральных преобразований изображений по линиям
- Математическая модель защиты компьютерной сети от вирусов
Back to the list of articles