Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Оптимизация многомерного статистического контроля рассеяния показателей технологического процесса
Аннотация:Исследуется контроль стабильности многопараметрического технологического процесса, когда через определенные промежутки времени проводится мониторинг множества показателей этого процесса. При мониторинге рассеяния коррелированных показателей применяется алгоритм обобщенной дисперсии. В статье предложен подход, основанный на поиске оптимальных пара-метров этого алгоритма по критерию минимума затрат, связанных с контролем. Для мониторинга стабильности показателей процесса и выявления нарушений с целью его своевременной корректировки используется статистический контроль – широко распространенный метод диагностики и управления технологическими процессами. При контроле многопараметрического процесса часть его показателей коррелированы, в этом случае для контроля средне-го уровня применяют карты Хотеллинга, а для контроля многомерного рассеяния – алгоритм обобщенной дисперсии. Для минимизации параметров алгоритма обобщенной дисперсии использованы три численных метода оптимизации. Программа написана на языке Python. В работе предложена методика и разработана соответствующая программа для оптимизации параметров многомерного статистического контроля рассеяния процесса по критерию минимизации затрат, связанных с контролем частоты взятия выборок (интервала между выборками), объема выборки и положения контрольных границ. Применение этой методики проиллюстрировано на примере данных конкретного технологического процесса: получены численные значения пара-метров контроля и ожидаемые затраты. Многомерный статистический контроль применяется как для мониторинга стабильности технологических процессов (например, механической обработки, производства лекарств, контроля качества очистки питьевой воды), так и для диагностики функционирования систем различного назначения (например, вибраций гидроагрегата). Этим объясняются актуальность и практическая значимость исследований.
Abstract:The paper investigates the stability control of a multiparameter technological process when many indi-cators of this process are monitored at certain intervals. A generalized variance algorithm is used when monitoring the scattering of correlated indicators. The paper proposes an approach related to the search for optimal parameters of this algorithm according to the criterion of the minimum cost associated with control. In order to monitor the stability of process indicators and identify violations to adjust the process timely, we use statistical control – a widespread method of diagnosing and controlling technological processes. When controlling a multiparameter process, some of its indicators are correlated. In this case, Hotelling charts are used to control the average level, and the generalized dispersion algorithm is used to control multivariate scattering. To minimize the parameters of the generalized variance algo-rithm, three numerical optimization methods are used. The program is written in Python. The paper proposes a methodology and develops an appropriate program for optimizing the pa-rameters of multivariate statistical control of process scattering according to the criterion of minimiz-ing the costs associated with control: the frequency of sampling (the interval between samples), the sample size and the position of the control boundaries. This technique is illustrated by the example of data from a specific technological process: numerical values of control parameters and expected costs are obtained. Multivariate statistical control is used both to monitor the stability of technological processes (for example, machining processes, drug production processes, quality control of drinking water purifica-tion), and to diagnose the functioning of systems for various purposes (for example, vibrations of a hy-draulic unit). This explains the relevance and practical significance of the research related to its opti-mization.
| Авторы: Клячкин В.Н. (v_kl@mail.ru) - Ульяновский государственный технический университет (профессор), Ульяновск, Россия, доктор технических наук, Алексеева А.В. (age-89@mail.ru) - Ульяновский государственный технический университет, кафедра прикладной математики и информатики, Ульяновское конструкторское бюро приборостроения (аспирант, инженер по стандартизации), Ульяновск, Россия | |
| Ключевые слова: статистический контроль, контрольная карта, обобщенная дисперсия, python |
|
| Keywords: statistical control, control chart, generalized variance, python |
|
| Количество просмотров: 2340 |
Статья в формате PDF |
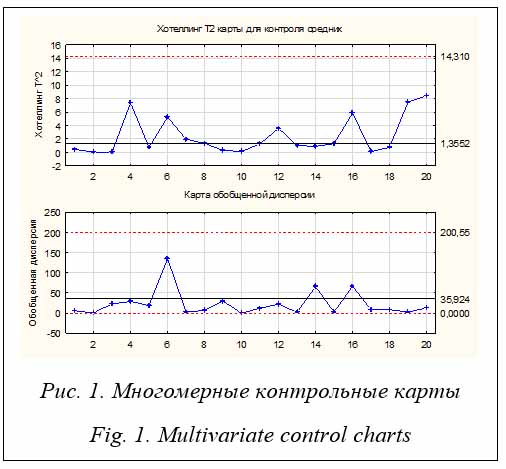
Статистический контроль является широко распространенным методом диагностики и управления, основное назначение которого – мониторинг стабильности показателей процесса и выявление нарушений с целью его своевременной регулировки. Главное преимущество такого подхода заключается в том, что нарушение выявляется статистическими методами (по выходу контролируемого показателя за границы доверительного интервала), поэтому управляющее воздействие осуществляется до выпуска дефектной продукции (когда показатель выходит за границы допуска) [1, 2]. Производится мониторинг среднего уровня и рассеяния процесса. Через определенные промежутки времени берутся «мгновенные» выборки (рациональные подгруппы), по которым вычисляются заданные характеристики. Наиболее распространенный метод контроля – использование стандартных карт Шухарта. При этом для контроля рассеяния показателей процесса применяют карты размахов или стандартных отклонений, реже – карты скользящих размахов, когда используются индивидуальные наблюдения (объем выборки равен единице) из-за технических сложностей или высокой стоимости измерений. Карты Шухарта эффективны при мониторинге независимых показателей процесса. При многомерном контроле, когда часть показателей коррелированы, такой подход приводит к существенным погрешностям [2, 3]. В этом случае для контроля среднего уровня многопараметрического процесса применяют карты Хотеллинга, а для контроля многомерного рассеяния – алгоритм обобщенной дисперсии. Обобщенная дисперсия – это определитель ковариационной матрицы S: в момент времени t по результатам наблюдений для каждой мгновенной выборки объемом n рассчитывается выборочная ковариационная матрица St (оценка матрицы S) и вычисляется ее определитель |St|, который и характеризует многомерное рассеяние процесса. Найденные значения |St| откладываются на карте обобщенной дисперсии. Они должны лежать в пределах доверительного интервала: в этом случае процесс считается стабильным (статистически управляемым) по критерию многомерного рассеяния.
Эффективность контроля определяется скоростью обнаружения возможных нарушений процесса и затратами на контроль, которые зависят от следующих параметров: частота взятия выборок – интервал между выборками h, объем выборки n и положение контрольных границ, которые, в свою очередь, определяются уровнем значимости a (вероятностью ложной тревоги). Впервые задача оптимизации параметров контроля была поставлена в классической работе [6], найдены эти характеристики для карты Шухарта из условия минимума затрат на контроль. Вопросы проектирования карты Хотеллинга с учетом экономических аспектов рассмотрены в статьях [7–9]. Оптимизации контроля рассеяния процесса на основе ковариационной матрицы посвящены работы [10–12]. Цель настоящего исследования – раз- работка алгоритма и программы для опти- мизации параметров многомерного стати- стического контроля рассеяния процесса по критерию минимизации затрат, связанных с контролем. Постановка задачи
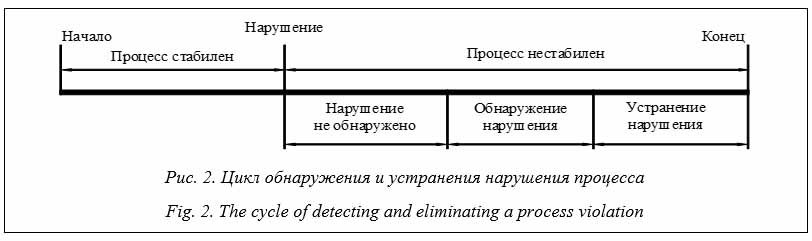
- время стабильного состояния процесса; - интервал, в котором нарушение процесса произошло, однако пока еще не обнаружено; - интервал времени на отбор выборки и обнаружение нарушения; - Аналогичный подход может быть использован при решении задачи оптимизации многомерного статистического контроля по критерию стабильности рассеяния. Предположим, что время возникновения нарушений имеет распределение Пуассона с параметром λ. Тогда, согласно Дункану, прогнозируемое время появления нарушения между выборками определяется по формуле
где h – промежуток времени между выборками. Время стабильного состояния процесса определяется как математическое ожидание распределения Пуассона, равное 1/λ. Интервал времени от момента нарушения до устранения этого нарушения равен h/(1 – β) – τ, где β – вероятность ошибки второго рода (процесс нарушен, но карта нарушение не обнаружила). Время на расчет элемента выборки предполагается постоянным и равным g, тогда интервал времени на отбор выборки и обнаружение нарушения равен ng. Время поиска нарушения после его обнаружения также предполагается постоянным и равно D. Таким образом, математическое ожидание продолжительности всего цикла, согласно Дункану, можно представить в виде
а длительность нестабильного состояния процесса
Тогда средние затраты на контроль, которые необходимо минимизировать,
где V0 – почасовые затраты при стабильном состоянии процесса; V1 – затраты при нестабильном состоянии; а3 – затраты на поиск причины нарушения; а¢3 – затраты на исследование сигнала ложной тревоги; здесь затраты на взятие выборки объема n и обработку результатов представлены как a1 + a2n, где a1 и a2 – постоянная и переменная составляющие затрат соответственно. При скачкообразном увеличении рассеяния обобщенная дисперсия процесса |Σ| увеличивается в d раз по сравнению с исходной (целевой) обобщенной дисперсией процесса в стабиль- ном состоянии |Σ0|: |Σ| = d |Σ0|. (5) Вероятность ошибки второго рода (обобщенная дисперсия увеличилась, однако при этом точки на карте оказались внутри контрольных границ) определяется по формуле Учитывая, что контрольные границы карты являются границами доверительного интервала для математического ожидания обобщенной дисперсии в предположении приближенной нормальности распределения [2]: m|Σ0| ± u1-a/2s|Σ0|, (7) где u1-a/2 – квантиль нормального распределения порядка 1 – a/2 (a – уровень значимости или вероятность ложной тревоги: вероятность того, что карта ошибочно покажет нарушение процесса), математическое ожидание обобщенной дисперсии m|Σ0| = b1|å0|, (8) стандартное отклонение s|Σ0| = коэффициенты
где р – количество контролируемых показателей процесса. Тогда по формуле (6) с учетом соотношений (5) и (7)–(11) после несложных преобразований получим
Постановка оптимизационной задачи следующая: - даны стоимостные характеристики процесса V0, V1, а1, а2, а3, а¢3, а также среднее время на расчет элемента выборки g и время поиска нарушения после его обнаружения D; - определить по результатам предыдущих испытаний среднее время 1/λ нахождения конкретного процесса в стабильном состоянии, а также допустимое увеличение обобщенной дисперсии d; - вычислить по заданной обучающей выборке значение целевой обобщенной дисперсии |å0|; - найти значения параметров многомерного статистического контроля рассеяния на основе обобщенной дисперсии: объема мгновенной выборки n, интервала между выборками h и уровня значимости a, определяющего положение контрольных границ из условия минимума математического ожидания средних затрат на контроль (4) с учетом соотношений (7)–(12); при этом, если по результатам расчета значение нижней контрольной границы окажется отрицательным, принимается нулевое значение (как это и оказалось в примере на рисунке 1). Дополнительно обычно задаются ограниче- ния nmin £ n £ nmax и hmin £ h £ hmax, где минимальные и максимальные значения объема выборки и интервала между выборками оцениваются специалистом по конкретному процессу. Также задается диапазон допустимых значений вероятности ложной тревоги: αmin £ α £ αmax. Программа оптимизации параметров при многомерном контроле рассеяния процесса Программа разработана на языке программирования Python. Используется библиотека scipy для научных и инженерных расчетов с открытым исходным кодом, из которой подключены модули optimize и stats. Программа обеспечивает: - ввод стоимостных характеристик процесса, среднего времени на расчет элемента выборки и времени поиска нарушения, среднего времени нахождения процесса в стабильном состоянии, допустимого увеличения обобщенной дисперсии d; - ввод обучающей выборки и расчет значения целевой обобщенной дисперсии; - ввод ограничений на объем мгновенной выборки, интервала между выборками и веро- ятности ложной тревоги; - поиск оптимальных значений объема мгновенной выборки, интервала между выбор- ками и уровня значимости. Задача оптимизации решается с помощью модуля optimize, при этом для корректной работы программы последовательно находится минимум функции тремя методами. 1. Метод trust-constr обеспечивает поиск локального минимума в доверительной области – аналоге доверительного интервала для многопараметрической целевой функции, которая аппроксимируется числовой функцией. Вначале выбирают ширину доверительной области, а потом направление. Для обеспечения сходимости с заданной точностью необходимо, чтобы начальное приближение было не слишком далеко от искомого оптимального решения. С этой целью на каждый шаг итерации накладываются ограничения, которые предотвращают «далекую» аппроксимацию.
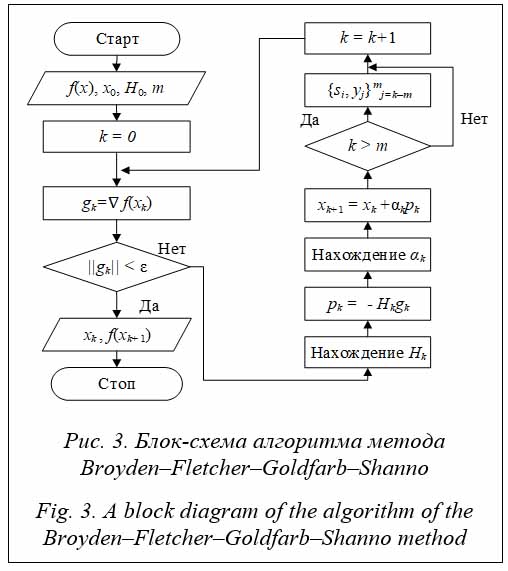
3. Метод Нелдера–Мида является надежным и эффективным методом прямого поиска, то есть использующим только значения функции, и относится к симплексным. Суть его заключается в вычислении значений функции в вершинах многогранника и последовательном итерационном перемещении симплекса в оптимальном направлении. Первоначально регулярный симплекс применялся на каждой итерации. Нелдер и Мид модифицировали метод путем использования неправильных симплексов. При этом перемещение симплекса осуществляется с помощью процедур отражения, растяжения и сжатия. Для поиска условного минимума используется функция minimize(f, x0, method='(l-bfgs-b'), bounds=bnds), (13) где f – целевая функция; х0 – вектор начальных условий (исходные значения h, n и α); me- thod – выбранный метод оптимизации (в фор- муле (13) в качестве примера подставлен метод Broyden–Fletcher–Goldfarb–Shanno); bounds – область поиска минимума функции. Границы поиска задаются вектором bnds = Bounds((hmin, nmin, αmin), (hmax, nmax, αmax)). (14) В качестве примера рассмотрен контроль процесса со следующими исходными данными: p = 2 (контролируются два коррелированных показателя); d = 2 (характеристика нарушения процесса: обобщенная дисперсия в два раза превышает целевое значение); λ = 0,125 (нарушение происходит примерно один раз за 8 часов); g = 0,0167 (время на вы- числение одного элемента выборки); D = 1 (время на выявление и устранение нарушения), затраты V0 = 150 у.е., V1 = 100 у.е., а1 = 1, а2 = 0,1, а3 = 25, а¢3 = 50, а4 = 100, а1 = 1. Специалист, учитывая технические возмож- ности процесса, задал ограничения на объем выборки (n) от 3 до 5 наблюдений, частоту от- бора выборок (h) от 0,4 до 1 часа и вероятность ложной тревоги (α) от 0,0001 до 0,01. Требуется найти такие значения n, h и α, при которых средние затраты на контроль процесса были бы минимальными. Таким образом, решается оптимизационная задача с ограничениями: M(С) → min при 3 < n < 5, 0,4 < h < 8, 0,0001 < α < 0,01. Результаты расчета в разработанной программе: Интерпретатор Python 1.Поиск локального минимума в доверительной области (trust-constr) h = 0.5 n = 5 alfa = 0.0001 M(C) = 443.18 2.Метод Broyden-Fletcher-Goldfarb-Shanno h = 0.4 n = 3 alfa = 0.0001 M(C) = 234.32 3.Метод Нелдера-Мида h = 0.4 n = 3 alfa = 0.0001 M(C) = 234.32 Таким образом, метод trust-constr дал такие результаты: n = 5, h = 0,5, α = 0,0001. Затраты на контроль при этом составили 443 у.е. Оба метода (l-bfgs-b и Нелдера–Мида) пока- зали одинаковые результаты: оптимальные значения параметров карты обобщенной дис- персии n = 3, h = 0,4, α = 0,001, при которых целевая функция М(С) принимает минималь- ное значение 234 у.е. Такой результат и прини- мается в качестве оптимального. При этом по- ложение контрольных границ карты при найденном уровне значимости α определяется по формуле (7). Заключение Разработанная программа позволяет опти- мизировать многомерный статистический кон- троль процесса по критерию минимума затрат при использовании карты обобщенной диспер- сии. На примере данных технологического процесса показана методика расчета объема мгновенной выборки, периодичности взятия выборок и значений положения контрольных границ, при которых затраты минимальны. В настоящей работе оптимизационная за- дача решена для случая, когда опасным счита- ется скачкообразное увеличение обобщенной дисперсии в d раз. Вызывает интерес решение этой задачи при постепенном увеличении обобщенной дисперсии. Кроме того, любопытно было бы найти эти же характеристики контроля одновременно по двум критериям – минимизируя и стоимость контроля, и время на обнаружение нарушения. Невыясненным остается вопрос с различными итоговыми значениями характеристик при оптимизации контроля по алгоритмам Хотеллинга и по обобщенной дисперсии. Эти и аналогичные задачи, возникающие в практике многомерного статистического кон- троля, еще предстоит решить. Литература 1. Адлер Ю.П., Шпер В.Л. Практическое руководство по статистическому управлению процессами. М.: Альпина Паблишер, 2019. 234 с. 2. Клячкин В.Н., Крашенинников В.Р., Кувайскова Ю.Е. Прогнозирование и диагностика стабильности функционирования технических объектов. М.: РУСАЙНС, 2020. 200 с. 3. Yang K., Qiu P. Adaptive process monitoring using covariate information. Technometrics, 2021, vol. 63, no. 3, pp. 313–328. DOI: 10.1080/00401706.2020.1772115. 4. Клячкин В.Н., Барт А.Д. Оценка стабильности показателей качества при очистке питьевой воды // Экологические системы и приборы. 2017. № 8. С. 14–20. 5. Toussaint-Jimenez N., Marimón-Bolívar W., Dominguez E. Estimation of a global self-purification capacity index for Mountain Rivers from water quality data and hydrotopographic characteristics. Proc. CONIITI, 2020, pp. 1–10. DOI: 10.1109/CONIITI51147.2020.9240307. 6. Duncan A.J. The economic design of x-chart used to maintain current control of the process. J. of the American Statistical Association, 1956, vol. 51, pp. 228–242. 7. Chen N., Zi X., Zou Ch. A distribution-free multivariate control chart. Technometrics, 2016, vol. 58, no. 4, pp. 448–459. DOI: 10.1080/00401706.2015.1049750. 8. Зенцова Е.А. Сравнительный анализ подходов к оптимизации параметров контрольной карты Хотеллинга // Автоматизация процессов управления. 2017. № 1. С. 47–52. 9. Зенцова Е.А. Проектирование контрольной карты Хотеллинга с учетом экономических аспектов ее применения // Прикладная математика и информатика: современные исследования в области естественных и технических наук: матер. Всерос. науч.-практич. конф. 2017. С. 211–215. 10. Spettel P., Beyer H.-G., Hellwig M. Covariance matrix self-adaptation evolution strategy for optimization under linear constraints. IEEE Transactions on Evolutionary Computation, 2019, vol. 23, no. 3, pp. 514–524. DOI: 10.1109/TEVC.2018.2871944. 11. Roberts I., Kahn J.M., Harley J., Boertjes D.W. Channel power optimization of WDM systems following gaussian noise nonlinearity model in presence of stimulated Raman scattering. J. of Lightwave Technology, 2017, vol. 35, no. 23, pp. 5237–5249. DOI: 10.1109/JLT.2017.2771719. 12. Mertikopoulos P., Moustakas A.L. Learning in an uncertain world: MIMO covariance matrix optimization with imperfect feedback. IEEE Transactions on Signal Processing, 2016, vol. 64, no. 1, pp. 5–18. DOI: 10.1109/TSP.2015.2477053. References
|
 (4)
(4) (11)
(11) (12)
(12)
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4897 |
Версия для печати |
| Статья опубликована в выпуске журнала № 2 за 2022 год. [ на стр. 215-221 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Система статистического анализа и контроля стабильности вибраций гидроагрегата
- Программная поддержка классификации платежных документов в банке
- Алгоритм поиска идиом в исходных текстах программ, использующий подсчет поддеревьев
- Архитектура программной платформы разработки и тестирования нейросетевых моделей для создания специализированных словарей
- Модель анализа и прогнозирования технологических параметров для процесса электронно-лучевой сварки
Назад, к списку статей