Journal influence
Bookmark
Next issue
System software for redundancy management of avionics complexes
Abstract:The paper presents the main results on the substantiation of functions, algorithms, software structure and features of the practical implementation of redundancy management system software (RMSS) intended for implementation in advanced avionics complexes. The authors use a method of managing the reconfiguration of heterogeneous redundant resources of on-board equipment based on configuration supervisors that are special software objects, each of which is cor-related with a specific configuration of equipment and performs all the procedures for preparing and imple-menting this configuration. The paper describes the main provisions of the developed approach based on configuration supervisors. It also presents the information structure of supervisors including a readiness buffer, configuration tables and functional efficiency indicators, monitoring modules, configuration arbitration, mode formation, man-agement, as well as auxiliary and buffer files. There is a presentation of the supervisor arbitration procedure including the stages of intercomputation and intersupervisory arbitration. The paper defines RMSS tasks and functions consisting in monitoring the condition, forming readiness indices and indicators of functional effi-ciency of configurations, adaptation to the complex operating modes, selection and implementation of con-figurations. The proposed RMSS structure includes a global, an external and internal levels implemented through configuration tables, executive procedures and buffer auxiliary files. The main features of the prac-tical implementation of RMSS in the onboard computing environment of integrated avionics with a real-time operating system are formulated. The proposed solutions and algorithms can be used in forming re-quirements and designing promising fault-tolerant on-board complexes with an excessive number of hetero-geneous resources, in developing appropriate on-board software.
Аннотация:В статье приводятся основные результаты по обоснованию функций, алгоритмов, программной структуры и особенностей практической реализации системного ПО управления избыточностью, предназначенного для реализации в перспективных комплексах бортового оборудования авиационной техники. Используется метод управления разнородными избыточными ресурсами бортового оборудования, основанный на супервизорах конфигураций – специальных программных объектах, каждый из которых соотнесен с определенной конфигурацией оборудования и выполняет все процедуры подготовки и реализации данной конфигурации. Изложены основные положения развиваемого подхода на основе супервизоров конфигураций. Представлена информационная структура супервизоров, включающая буфер готовности, таблицы конфигураций и показателей функциональной эффективности, модули мониторинга, арбитража конфигураций, формирования режимов управления, а также вспомогательных и буферных файлов. Представлена процедура арбитража супервизоров, включающая этапы межвычислительного и межсупервизорного арбитражей. Определены задачи и функции системного ПО управления избыточностью, состоящие в мониторинге состояния, формировании индексов готовности и показателей функциональной эффективности конфигураций, адаптации к режимам работы комплекса, выбора и реализации конфигураций. Предложена структура системного ПО управления избыточностью, включающая глобальный, внешний и внутренний уровни, реализуемые посредством конфигурационных таблиц, исполнительных процедур и буферных вспомогательных файлов. Сформулированы основные особенности практической реализации системного ПО управления избыточностью в бортовой вычисли-тельной среде интегрированной авионики с операционной системой реального времени. Предложенные решения и алгоритмы могут быть использованы при формировании требований и проектировании перспективных отказоустойчивых бортовых комплексов с избыточным числом разнородных ресурсов, разработке соответствующего бортового ПО.
| Authors: Ageev A.M. (ageev_bbc@mail.ru) - N.E. Zhukovsky and Yu.A. Gagarin Air Force Academy (Associate Professor, Doctoral Student), Voronezh, Russia, Ph.D, Novitsky L.V. (leonid@wisetech.pro) - WiseTechnique (General Director), Zhukovsky, Russia, Tsvetkov E.S. (e.tsvetkov@wisetech.pro) - WiseTechnique (Teacher-Researcher), Zhukovsky, Russia, Shurman V.A. (shurmanva@mail.ru) - Scientific Research Institute of Aviation Equipment (Deputy General Designer), Zhukovsky, Russia | |
| Keywords: configuration arbitration algorithm, configuration supervisor, redundancy management, on-board equipment complex, system software |
|
| Page views: 1057 |
PDF version article |
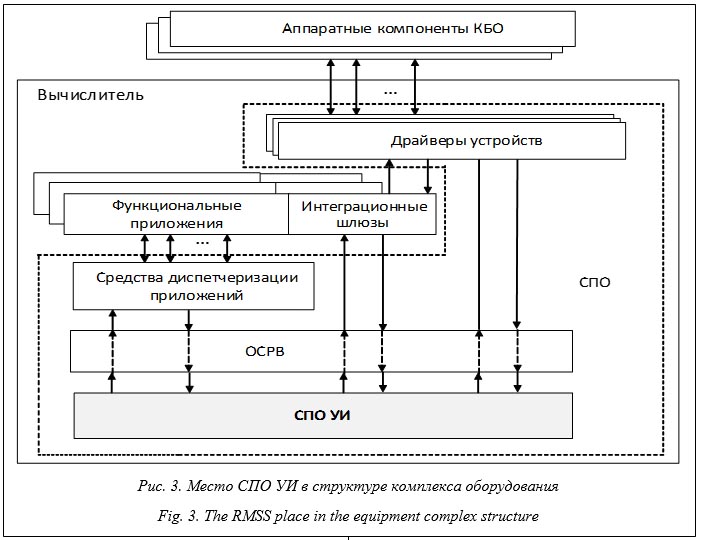
Современные комплексы бортового оборудования (КБО) высоконадежной авиационной техники являются результатом объединения избыточной совокупности различных по назначению и принципам функционирования компонентов. В работах [1, 2] совокупность операций, включающую мониторинг состояния компонентов избыточного комплекса и его реконфигурирование для парирования отказов и адаптации к условиям работы, предложено называть управлением избыточностью (УИ). Архитектура избыточного КБО, рассматри- ваемого в [2] в качестве объекта УИ, в общем случае содержит: - избыточное число разнородных и неуниверсальных компонентов (аппаратных и/или программных), как правило, со встроенными средствами контроля (ВСК) их состояния; - распределенную бортовую интегрированную вычислительную среду [3] в составе резервированных центральных вычислителей, бортовой сети, включая средства коммутации каналов и доставки данных между вычислителями и компонентами, периферийных систем и устройств с локализованными в них вычислительными средствами, в совокупности образующих единое информационное пространство; - системное и функциональное ПО вычислителей, включая соответствующие средства мониторинга их состояния и диспетчеризации. Так, существующая практика разработки интегрированной модульной авионики [4–6] предполагает реализацию целевых функций авиационной техники путем выполнения в бортовых вычислителях модулей ПО, которое условно можно разделить на: - функциональное (ФПО) – функциональные бортовые приложения, реализующие отдельные целевые функции КБО, обеспечивая его работу по предназначению (самолетовождение, навигация, радиосвязь, контроль и управление подсистемами и общесамолетным оборудованием и др.) [7, 8]; - системное (СПО) – программы и процедуры общего назначения, обеспечивающие реализацию функций КБО (операционная система реального времени (ОСРВ) [9, 10], пакеты поддержки платформы интегрированной модульной авионики, драйверы устройств, тесты встроенного контроля и др.). Уровень сложности бортовых авиационных систем, обусловленный возрастающим количеством функций и соответствующим разнообразием связей между разнородными компонентами различных подсистем КБО, использующих общие, а иногда взаимные избыточные ресурсы друг друга, заставляет искать пути рациональной организации управления такой избыточностью [11-13]. В статье приводятся новые научные результаты, полученные в рамках развиваемого супервизорного подхода к управлению избыточностью технических систем, которые заключаются в обосновании функций, алгоритмов и программно-логической структуры СПО УИ. Рассмотрены особенности практической реализации СПО УИ в перспективных бортовых вычислительных системах КБО. Основные положения подхода на основе супервизоров конфигураций
- модуль мониторинга осуществляет сбор данных о состоянии компонентов соотнесенной конфигурации (формирует команды запроса и получает информацию о готовности от ВСК компонентов), их обработку с получением результата в виде индекса готовности (ИГ) каждого компонента соотнесенной конфигурации, характеризующего их работоспособность, обеспеченность всеми видами ресурсов (электропитание, охлаждение, связь и т.п.), и прохождение всех необходимых подготови- тельных процедур (загрузка и инициализация программ) с целью принятия решения о готовности конфигурации в целом; - буфер ИГ содержит информацию об ИГ компонентов конфигурации, а также формирует интегральный ИГ (ИИГ) конфигурации; - таблица конфигурации содержит информацию о соотнесенной конфигурации (задействованных компонентах и связях между ними), которая записывается заранее на этапе разработки системы (на рисунке 1 представлен вариант таблицы с кодированием связей между входами и выходами компонентов); - таблица показателей функциональной эффективности содержит информацию о показателях функциональной эффективности (ПФЭ) компонентов соотнесенной конфигурации – показателях компонентов, характеризующих их вклад в общую эффективность конфигурации (точность, энергоэффективность, экономичность и т.д.); - модуль режимов осуществляет коррекцию ПФЭ в зависимости от режима работы КБО (этап полета, режимы аварийности, критичность состояния, режимы работы наиболее важных подсистем и пр.), а также внешних условий, действий и команд экипажа путем выбора того или иного набора ПФЭ в зависимости от режима и/или за счет введения корректирующих коэффициентов эффективности, повышающих, понижающих либо обнуляющих исходные ПФЭ компонентов и/или конфигураций, осуществляя адаптацию СУИ к текущим условиям и формируя интегральный ПФЭ (ИПФЭ) конфигурации; - модуль арбитража осуществляет выбор предпочтительной конфигурации в сложившихся условиях функционирования комплекса путем сравнения интегральных ИГ и ПФЭ конфигураций по определенным правилам, в результате чего осуществляет выбор предпочтительной для реализации конфигурации; - управляющий модуль формирует команды валидации и реализации предпочтительной конфигурации, а также обеспечивает согласованную циклическую работу СУИ совместно с КБО; - вспомогательные процедуры и буферные файлы, необходимые для полноценной работы СК и СУИ в целом. Принципы хранения и формирования данных в приведенной информационной структуре СК подробно изложены в [14]. Копии всех супервизоров размещены в каждом из вычислителей КБО, потенциально обладающих правом (и возможностью) управлять избыточностью бортовой интегрированной вычислительной среды и комплекса в целом. При этом в текущий момент времени функции УИ выполняет только доминирующий СК (ДСК), победивший в арбитраже между СК, размещенными в доминирующем вычислителе, победившем, в свою очередь, в арбитраже вычислителей.
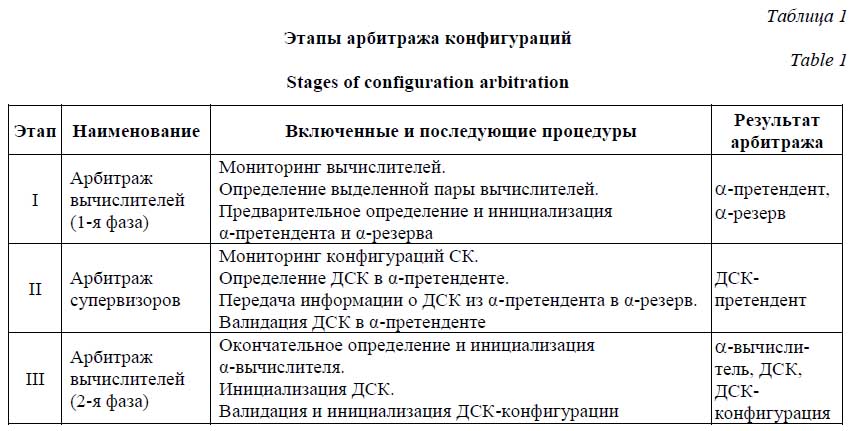
Выбор предпочтительной конфигурации определяется путем сравнения их ИИГ, далее – сравнения ИПФЭ, а в случае совпадения по их порядковым номерам СК с использованием введенных дискриминационных правил. Выбор предпочтительного вычислителя определяется путем сравнения их ИГ, а также целостности и возможности реализации ДСК и соотнесенной с ним ДСК-конфигурации средствами данного вычислителя. Этап I – межвычислительный арбитраж (1-я фаза, предварительный выбор вычислителей), на котором проводятся: - определение ИГ каждого вычислителя; - формирование группы готовых к работе вычислителей с положительным ИГ; - выделение пары вычислителей в группе готовых вычислителей по принятому дискриминационному правилу (например, по порядковому номеру); - выбор α-претендента и α-резерва в выделенной паре вычислителей по принятому дискриминационному правилу. Этап II – межсупервизорный арбитраж (конкурс СК), выполняющийся α-претендентом и включающий: - формирование ИГ программных и аппаратных компонентов и ИИГ каждой конфигурации КБО; - формирование ПФЭ компонентов и ИПФЭ каждой готовой конфигурации приме- нительно к сложившимся условиям функционирования КБО; - последовательный попарный выбор ДСК-претендента с учетом их ИИГ и ИПФЭ путем выполнения процедур парного арбитража конфигураций (ПАК); - передача информации о ДСК из α-претендента в α-резерв. Этап III – межвычислительный арбитраж (2-я фаза, итоговый конкурс ВМ), на котором: - вычислители выделенной пары (α-претендент и α-резерв) вступают в парный арбитраж вычислителей (ПАВ) с целью выявления в паре такого вычислителя, который безошибочно воспроизводит все характеристики конфигурации, соотнесенной с ДСК; - вычислитель, выигравший арбитраж, окончательно объявляется α-вычислителем, и именно ему вплоть до результатов следующего ПАВ предоставляется право реализовать конфигурацию КБО, соотнесенную с ДСК; - выбранный α-вычислитель осуществляет необходимое согласование действий всех остальных вычислителей. С целью обеспечения бесконфликтности перехода от одной конфигурации КБО к другой могут использоваться буферные конфигурации КБО, к которым предъявляются пониженные требования по качеству функционирования объекта в целом, но повышенные по минимизации задержек формирования конфигурации и предотвращению недопустимых процессов при включении и отключении основных конфигураций. Процедуры ПАК и ПАВ могут быть реали- зованы путем взаимного парного контроля ИГ, ПФЭ и идентификаторов СК и вычислителей, с принятием логики однозначного непротиворечивого выбора, возможно, с применением дополнительных процедур самоконтроля или сравнения с эталонными значениями [15]. Задачи и функции СПО УИ Для практической реализации СК в бортовых вычислителях необходима рациональная организация соответствующих информационно-управляющих структур в составе СПО. Согласно предлагаемому подходу [1, 2], основными задачами СУИ КБО являются: - непрерывный мониторинг технического состояния компонентов КБО; - учет условий и режимов функционирования КБО; - формирование оценок готовности и эффективности конфигураций; - выбор предпочтительной конфигурации из множества допустимых (из соображений исправности, принадлежности к классу решаемых задач и т.д.); - валидация (подтверждение соответствия требованиям) конфигурации; - реализация предпочтительной конфигурации через коммутационные средства бортовой интегрированной вычислительной среды и процедуры диспетчеризации приложений. Для выполнения указанных задач СУИ с учетом предлагаемой информационной структуры СК бортовое СПО УИ должно выполнять следующие функции: - хранить информацию о текущей конфигурации КБО (составе и правилах взаимодействия и активизации/инициализации аппаратных и программных компонентов, входящих в конфигурацию); - хранить информацию об ИГ и ПФЭ компонентов, составляющих конфигурацию, и об интегральных ИГ и ПФЭ конфигурации в целом; - осуществлять периодический мониторинг технического состояния компонентов КБО с формированием их ИГ и ПФЭ; - формировать ИИГ и ИПФЭ конфигураций; - определять приоритет выбора ПФЭ и/или корректировать ПФЭ в зависимости от режимов функционирования КБО, внешних условий или команд экипажа; - реализовывать процедуры арбитража вычислителей КБО с целью определения доми- нирующего в части выполнения функций УИ вычислителя; - реализовывать процедуры арбитража конфигураций с целью определения предпочтительной конфигурации, а также доминирующего в части выполнения функций УИ супервизора; - производить валидацию супервизоров и конфигураций, победивших в арбитраже; - управлять коммутационной системой и системой диспетчеризации приложений с целью реализации победившей в арбитраже конфигурации КБО; - обеспечивать правильную циклическую работу СУИ с учетом обеспечения согласованной бесперебойной работы КБО по предназначению [16]. Структура программных компонентов СПО УИ
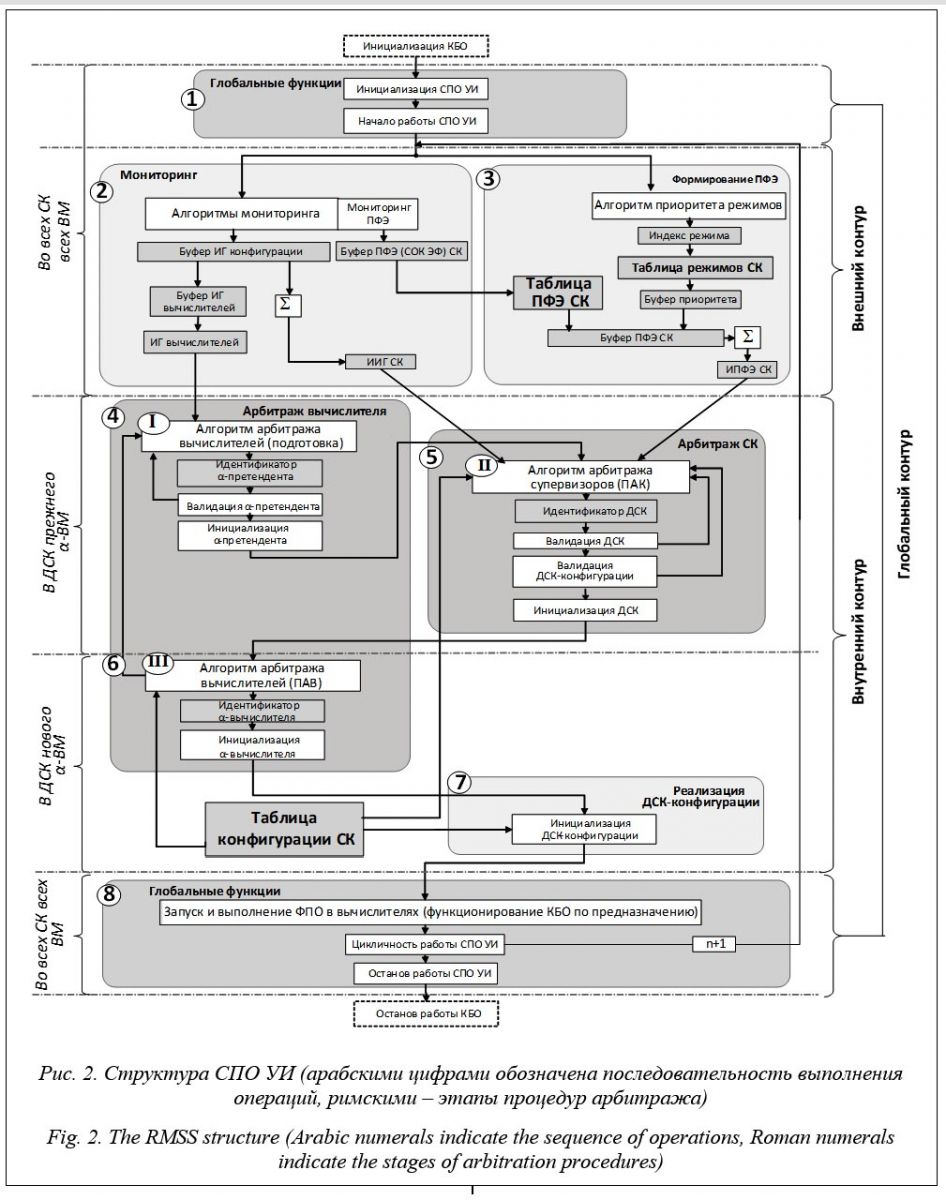
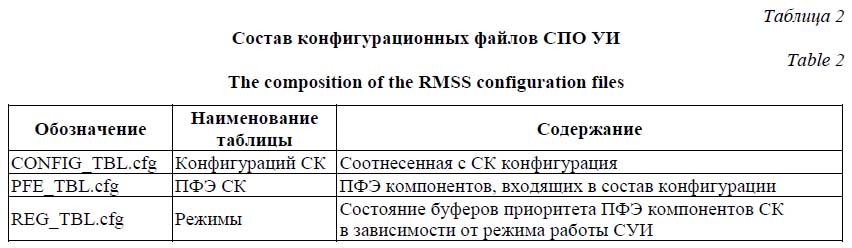
1) глобальный контур, на котором обеспечиваются общие процедуры работы СПО УИ, связанные со взаимодействием СПО УИ и КБО; 2) внешний контур, обеспечивающий общие для всех СК процедуры УИ, который включает уровни: – мониторинга ресурсов КБО и определения ИИГ конфигураций; – формирования ПФЭ, реализующий функции формирователя режима и определения ИПФЭ конфигураций; 3) внутренний контур, обеспечивающий процедуры арбитража вычислителей, СК и функционирования ДСК, который включает уровни: – межвычислительный (этапы I и III арбитража), обеспечивающий процедуры арбитража вычислителей, а также валидации и инициализации α-вычислителя и ДСК; – межсупервизорный (этап II арбитража), обеспечивающий процедуры арбитража супервизоров, валидации и инициализации ДСК-конфигурации. Основным программным модулем, тиражированным по числу предусмотренных (просчитанных, доступных) конфигураций КБО и таким образом составляющим костяк СПО УИ, является СК. Состав всех СК одинаков, за исключением конфигурационных таблиц (таблиц конфигураций, таблиц ПФЭ и таблиц режимов), наполнение которых соответствует конкретной конфигурации, соотнесенной с СК. Программные компоненты СПО УИ, составляющие СК, можно разделить на три группы. А. Конфигурационные таблицы, предназначенные для хранения постоянной информации о конфигурациях, их ПФЭ и режимах работы комплекса. Могут быть реализованы в форме электронных таблиц со статичными значениями.
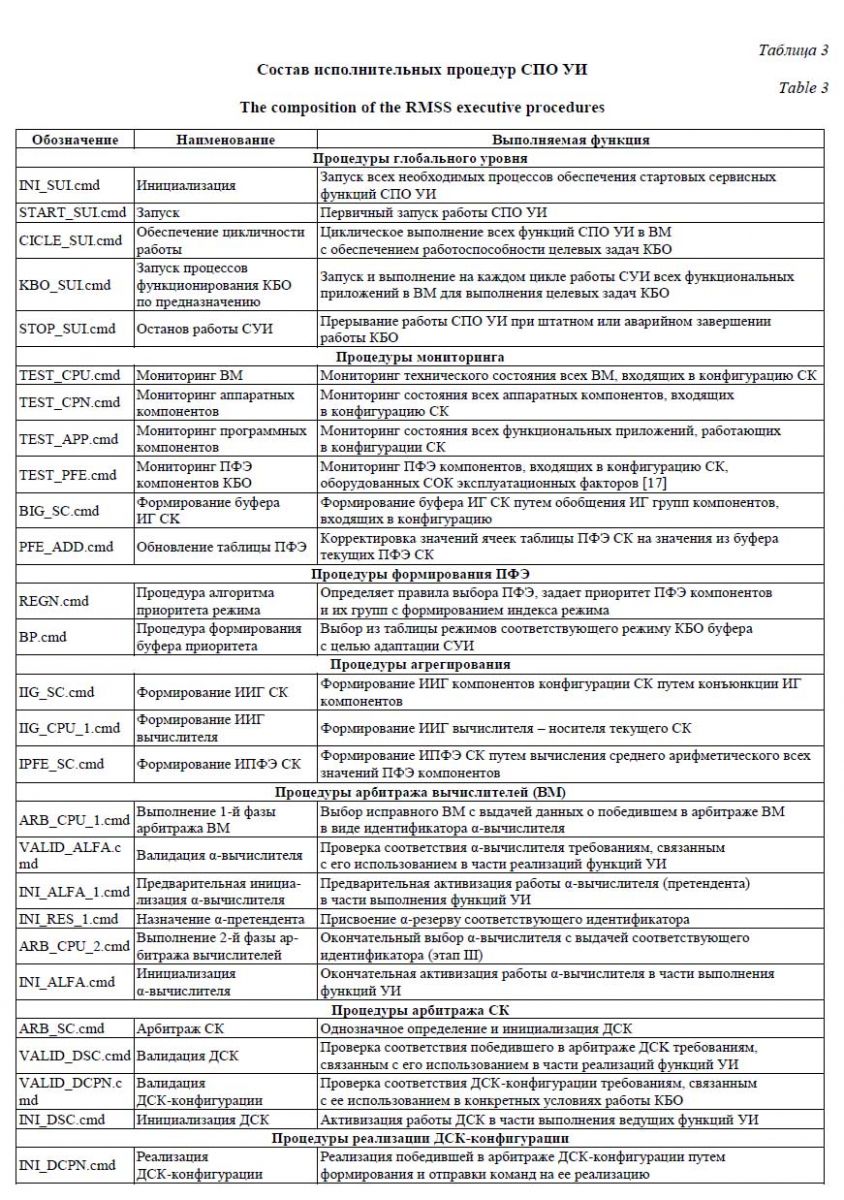
Б. Исполнительные процедуры предназначены для выполнения процедур УИ КБО. Могут быть реализованы в виде отдельных исполнительных программ, процедур в составе программ, подпроцедур в составе процедур. Они производят запуск процедур и подпрограмм, поиск, чтение и запись информации конфигурационных файлов, реализацию функций ДСК, команд на коммутацию оборудования и т.д. на различных этапах (и уровнях) УИ. Состав и выполняемые функции исполнительных процедур сведены в таблицу 3. В. Буферные файлы (буферы) предназначены для хранения переменной информации о текущем состоянии КБО (ИГ, ИР, БП и др.), а также вспомогательных, в том числе временно сформированных, таблиц, векторов и констант с данными, используемых на различных этапах работы СУИ. Состав и выполняемые функции буферных файлов представлены в таблице (см. http:// www.swsys.ru/uploaded/image/2022-4/2022-4-dop/1.jpg). Особенности практической реализации
В конкретных проектах необходимо приходить к рациональным решениям по реализации СПО УИ, исходя из задач, имеющихся ресурсов и ограничений. Например, важным явля- ется вопрос достаточности ресурсов бортовых вычислителей (памяти для хранения программного кода и данных) для размещения копий всех СК и реализации в реальном времени соответствующих процедур. Поэтому реализация СУИ на различных этапах внедрения может по объективным причинам отличаться от идеальной, при которой желательно размещение всех копий СК во всех вычислительных модулях КБО. Для полноценной реализации подхода желательно полное «клонирование» всего набора СК в вычислителях, причем крайне желательна была бы разработка отдельных программных модулей различных СК (в особенности в части критически важных для безопасности полетов конфигураций) разными группами разработчиков. Однако допустимы, особенно на начальных этапах реализации СПО УИ, и компромиссные с позиции упрощения способы реализации, используя разграничения функций СК. Таким образом, какие-то модули СК могут быть вынесены из состава супервизора и СУИ, заимствованы из других систем (программных модулей ОСРВ, служебных (сервисных) средств СПО (драйверы устройств, менеджеры ресурсов, диспетчеры приложений и др.). Кроме того, возможны варианты с реализацией функций СПО УИ в рамках существующих бортовых автоматизированных систем контроля и технического обслуживания [19]. Возможным видится использование для задач хранения модулей СК постоянных запоминающих устройств, при этом выполнение процедур можно производить в оперативной памяти (ОЗУ, кэш-память), для чего нужно осуществлять загрузку в ОЗУ пары СК для участия в арбитраже и мониторинга (см. http:// www.swsys.ru/uploaded/image/2022-4/2022-4-dop/2.jpg). При этом на ДСК, выбранный по итогам арбитража, требуется возлагать активизацию полного объема всех процедур, необходимых для организации межсупервизорного арбитража и управления СУИ. Заключение В статье изложены основные положения развиваемого подхода к управлению избыточ- ностью КБО авиационной техники на основе СК. Представлена уточненная информационная структура СК, включающая буфер готовности, таблицы конфигураций и показателей функциональной эффективности, модули мониторинга, арбитража конфигураций, формирования режимов, управления, а также вспомогательные и буферные файлы. В развитие разрабатываемого подхода определены задачи и функции системного ПО управления избыточностью. Предложена структура СПО УИ, включающая глобальный (связь с КБО), внешний (мониторинг) и внутренний (арбитраж) уровни, реализуемые посредством конфигурационных таблиц, исполнительных процедур и буферных файлов. Сформулированы основные особенности практической реализации СПО УИ в бортовых вычислительных системах интегрированной модульной авионики с ОСРВ. Предложенные решения могут быть использованы при формировании требований и проектировании перспективных отказоустойчивых КБО авиационной техники с избыточным числом разнородных ресурсов, а также при разработке соответствующего бортового ПО. Литература 1. Агеев А.М., Буков В.Н., Шурман В.А. Арбитражный подход к управлению избыточностью комплекса бортового оборудования на основе супервизоров конфигураций // Проблемы управления. 2022. № 2. С. 24–35. 2. Агеев А.М., Буков В.Н., Шурман В.А. Система управления избыточностью комплексов бортового оборудования: супервизорный подход // Матер. XIV МКПУ. 2021. Т. 2. С. 87–90. 3. Авакян А.А. Унифицированная интерфейсно-вычислительная платформа для систем интегральной модульной авионики // Тр. МАИ. 2013. № 65. С. 1–15. URL: https://mai.ru/upload/iblock/ef2/ ef27b80547a7e4d7f6268ce652c5d346.pdf?referer=https%3A%2F%2Fwww.yandex.ru%2F (дата обращения: 28.06.2022). 4. Федосов Е.А., Косьянчук В.В., Сельвесюк Н.И. Интегрированная модульная авионика // Радиоэлектронные технологии. 2015. № 1. С. 66–71. 5. Spitzer C.R., Ferrell U., Ferrell T. Digital Avionics Handbook. London, CRC Press Publ., 2017, 815 p. DOI: 10.1201/B17545. 6. Парамонов П.В., Жаринов И.О. Интегрированные бортовые вычислительные системы: обзор современного состояния и анализ перспектив развития в авиационном приборостроении // Науч.-технич. вестн. информационных технологий, механики и оптики. 2013. № 2. С. 1–17. 7. Корнеенкова А.В., Доброхотов Р.А. Реализация программного комплекса разработки програм- мных приложений интегрированной модульной авионики по стандарту ARINC653 // Открытое образование. 2017. № 1. С. 44–50. DOI: 10.21686/1818-4243-2017-1-44-50. 8. Шейнин Ю.Е., Сыщиков А.Ю., Седов Б.Н. Технология и инструменты разработки ФПО для встраиваемых многопроцессорных систем и распределенных комплексов ИМА // Перспективные направления развития бортового оборудования гражданских воздушных судов: матер. докл. V Междунар. науч.-практич. конф. 2019. С. 17–23. 9. Маллачиев К.М., Пакулин Н.В., Хорошилов А.В. Устройство и архитектура операционной системы реального времени // Тр. ИСП РАН. 2016. Т. 28. № 2. С. 181–192. DOI: 10.15514/ISPRAS-2016-28(2)-12. 10. Годунов А.Н. Операционная система реального времени Багет 3.0 // Программные продукты и системы. 2010. № 4. С. 15–19. 11. Amato F., Cosentino C., Mattei M., Paviglianiti G. A direct/functional redundancy scheme for fault detection and isolation on an aircraft. Aerospace Science and Technology, 2006, vol. 10, no. 4, pp. 338–345. DOI: 10.1016/J.AST.2006.03.002. 12. Захаров Н.А., Клепиков В.И., Подхватилин Д.С. Управление избыточностью сетевых распределенных систем необслуживаемой авионики // Авиакосмическое приборостроение. 2018. № 3. С. 3–12. 13. Буков В.Н., Бронников А.М., Гамаюнов И.Ф. Управление избыточностью технических систем. Генерирование альтернативных конфигураций. М.: ИД Академии им. Н.Е. Жуковского, 2021. 280 с. 14. Агеев А.М. Принципы хранения и мониторинга информации о конфигурациях в задаче управления избыточностью комплекса бортового оборудования // Мехатроника, автоматизация, управление. 2022. Т. 31. № 1. С. 45–55. DOI: 10.17587/mau.23.45-55. 15. Агеев А.М., Буков В.Н., Шурман В.А. Алгоритмы управления избыточностью комплексов бортового оборудования подвижных объектов. Часть 1. Парный арбитраж конфигураций // Мехатроника, автоматизация, управление. 2022. Т. 23. № 5. С. 263–273. DOI: 10.17587/mau.23.263-273. 16. Костенко В.А., Смелянский Р.Л. Проблемы построения бортовых комплексов с архитектурой интегрированной модульной авионики // Радиопромышленность. 2016. № 3. С. 63–70. 17. Джанджгава Г.И., Дядищев А.В., Гарифов Р.Ш. О концепции мониторинга технического состояния изделий авионики на основе применения средств и методов физической диагностики // Идеи и новации. 2018. Т. 6. № 3. С. 64–68. 18. Бурдонов И.Б., Косачев А.С., Пономаренко В.Н. Операционные системы реального времени. М.: Институт системного программирования РАН, 2006. 98 с. 19. Чернодаров А.В. Контроль, диагностика и идентификация авиационных приборов и измерительно-вычислительных комплексов. М.: Научтехлитиздат, 2017. 300 c. References
|

| Permanent link: http://swsys.ru/index.php?page=article&id=4962&lang=en |
Print version |
| The article was published in issue no. № 4, 2022 [ pp. 758-769 ] |
Back to the list of articles