Комплекс программ для расчета автоматических систем регулирования технологических процессов
| Комиссарчик В.Ф. () - , Исмагилов И.Б. () - | |
| Ключевое слово: |
|
| Ключевое слово: |
|
|
|
|
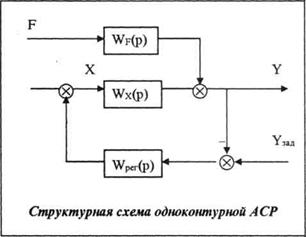
Одной из важнейших задач автоматизации технологических процессов* является автоматическое регулирование, реализуемое посредством автоматических систем регулирования (АСР). Большое значение при разработке АСР имеет расчет настроек регуляторов, квалифицированность выполнения которого определяет качество регулирования, а, следовательно, работоспособность и эффективность системы автоматизации в целом. В настоящей статье описывается комплекс программных средств для расчета настроек регуляторов в одноконтурных и комбинированных АСР. Одноконтурные АСР с типовыми линейными законами регулирования находят наибольшее применение при автоматизации технологических процессов. Структурная схема одноконтурной АСР изображена на рисунке1, где
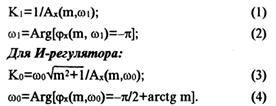
Y,Yзад - действительное и заданное значения регулируемой величины; X -регулирующее воздействие; F - Возмущающее воздействие; Wx(p) - передаточная функция объекта регулирования по каналу регулирующего воздействия; W F(p) передаточная функция объекта регулирования по каналу возмущающего воздействия; *Комиссарчик В.Ф. Автоматическое регулирование технологических процессов: Учебное пособие. ТГТУ, 1995 (и далее по тексту: см. Комиссарчик В.Ф.) Wрег(p) - передаточная функция регулятора. Предполагается, что передаточная функция объекта регулирования по каналам управляющего и возмущающего воздействий может быть представлена последовательным соединением 4-ех типовых звеньев. Допускается использование нескольких звеньев одного типа. Максимальное число звеньев в одной передаточной функции 10. В качестве типовых используются четыре наиболее часто встречающихся в практике расчетов АСР звена: - инерционное первого порядка; - идеальное интегрирующее; - колебательное; - чистого запаздывания. Описываемый комплекс программ позволяет рассчитать настройки пяти типовых регуляторов: - пропорционального; - интегрального; - пропорционально-интегрального; - пропорционально-дифференциального; - пропорционально-интегрально-дифференциального. Для определения настроек типовых регуляторов используется метод расширенных частотных характеристик (см. Комиссарчик В.Ф.), достоинством которого является возможность расчета настроек регуляторов в системе с чистым запаздыванием, а также достаточная простота его машинной реализации. Этот метод позволяет рассчитать настройки регулятора, обеспечивающие заданную колебательность переходного процесса в замкнутой АСР. Колебательность переходного процесса оценивается степенью затухания и степенью колебательности m. Настройки регуляторов определяются по линии равного затухания (ЛРЗ), для построения которой необходимо предварительно получить расширенные частотные характеристики (РЧХ) объекта регулирования. Расширенная амплитудно-частотная характеристика (РАЧХ) объекта находится перемножением РАЧХ типовых звеньев, а расширенная фазово-частотная характеристика (РФЧХ) jx (m, w) - суммированием РФЧХ типовых звеньев, входящих в модель объекта регулирования. В программе имеется библиотека РАЧХ и РФЧХ типовых звеньев, оформленная в виде отдельного модуля, к которому по мере необходимости происходит обращение из модулей, осуществляющих расчет настроек регуляторов. Предварительно определяются граничные частоты w0, w1, w2 для расчета ЛРЗ, который осуществляется по следующим формулам. Для регуляторов с одним настроечным параметром (П, И) ЛРЗ вырождается в точку, определяемую следующими соотношениями.
Для П-регулятора:
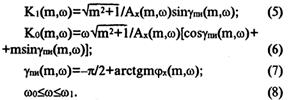
Для регуляторов с двумя настроечными параметрами (ПИ, ПД) ЛРЗ строится соответственно в координатах K0-K1 и К1-К2 по выражениям: Для ПИ-регулятора:
Для ПД-регулятора:
Для ПИД-регулятора с тремя настроечными параметрами строится семейство ЛРЗ в координатах K0-K1 при фиксированных значениях К2 по выражениям:
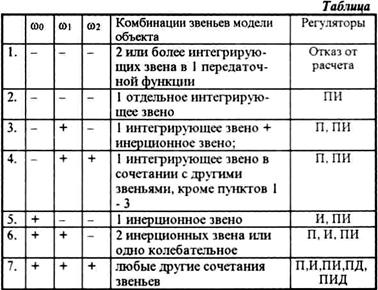
где К0, K1, K2 - коэффициенты соответственно интегральной, пропорциональной и дифференциальной составляющей в законе регулирования; Ти - время изодрома; Тп - время предварения. Затем модель объекта регулирования анализируется на предмет возможности расчета тех или иных типов регуляторов в соответствии с таблицей, исходя из существования каждой из граничных частот (- - частота не существует, + -существует). Далее расчет настроек регуляторов производится следующим образом. Регуляторы с одним настроечным параметром (П, И). - Определяется значение РАЧХ объекта регулирования для соответствующей регулятору граничной частоты. - По формуле (1) или (3) определяется настройка П- или И- регулятора. Регуляторы с двумя настроечными параметрами (ПИ, ПД). -По выражениям (5)...(8) или (9)...(13) рассчитываются массивы координат точек ЛРЗ для системы с ПИ- или ПД- регулятором. График ЛРЗ выводится на экран. Массивы координат точек ЛРЗ автоматически записываются в файл и могут быть использованы в дальнейшем для вывода графика на экран. - Программа предоставляет пользователю настройки, соответствующие четырем точкам на ЛРЗ: 80% левее максимума, максимум, 80% и60% правее максимума. Пользователь имеет возможность построить переходные процессы в системе, используя в качестве настроек регулятора настройки, соответствующие любой из4-х точек и оценить качество регулирования в каждом из случаев. Если ЛРЗ разомкнута по K1или по K2 , в качестве оптимальных выбирают настройки, соответствующие максимально допустимому по техническим характеристикам регулятора значению К0 (для ПИ-регулятора)или К (для ПД-регулятора), которые запрашиваются у пользователя. ПИД-регулятор. Расчет настроек ПИД-регулятора производится при условии заданного значения отношения Тп/Ти в диапазоне 0.1 - 0.25. При вычислении ЛРЗ используется итерационная процедура определения значения Кг, при котором выполняется ограничение (17). На каждом шаге фактическое значение Тп/Ти сравнивается с требуемым с заданной точностью. При попадании отклонения в диапазон заданной точности происходит запоминание настроек ПИД-регулятора и выход из итерационной процедуры. Расчет переходного процесса в замкнутой системе по каналам регулирующего или возмущающего воздействий производится методом Акулышина (см. Комиссарчик В.Ф.). Массивы координат точек графика переходного процесса записываются в файл (как и при построении ЛРЗ). На экран, кроме графика переходного процесса, выводится величина интегрального квадратичного критерия качества. В комбинированной АСР в качестве компенсатора используется реальное дифференцирующее звено, для расчета настроек которого используется приближенный метод (см. Комиссарчик В.Ф.). Суть метода заключается в компенсации возмущения на резонансной частоте системы автоматического регулирования. Для расчета настроек устройства компенсации должна быть предварительно задана передаточная функция объекта регулирования по каналу возмущающего воздействия. Расчет настроек устройства компенсации осуществляется в следующей последовательности. 1. Определяется резонансная частота системы, для чего рассчитывается АЧХ замкнутой системы по каналу возмущающего воздействия и определяется ее экстремум. 2. Из условия абсолютной инвариантности системы к возмущающему воздействию строится вектор идеального устройства компенсации на резонансной частоте. 3. Определяется возможность точной или приближенной компенсации возмущающего воздействия. При этом возможны следующие варианты: а) вектор идеального устройства компенсации в третьем или четвертом квадранте (в этом случае расчет настроек компенсатора невозможен); б) вектор идеального устройства компенсации во втором квадранте (в этом случае осуществляется приближенная компенсация возмущения); в) вектор идеального устройства компенсации в первом квадранте (в этом случае осуществляется точная или приближенная компенсация в зависимости от соотношения расчетного значения коэффициента передачи компенсатора и его максимально допустимого значения). 4. Расчет настроек устройства компенсации. По окончании расчета настроек компенсатора пользователь имеет возможность построить график переходного процесса в системе с компенсатором и оценить эффективность компенсации возмущения. Данный комплекс программ написан на языке программирования Turbo Pascal 7.0 с использованием модулей библиотеки Turbo Vision. Язык программирования был выбран исходя из наличия в нем развитых средств поддержки математических вычислений, а также текстового и графического интерфейсов. Во время работы ведется протокол, включающий в себя числовые данные и графики с необходимыми пояснениями. Комплекс программ реализован в виде отдельных модулей с использованием модульной структуры языка программирования Turbo Pascal 7.0. Назначение отдельных модулей: КМВ - главный модуль; P_REG, I_REG, PI_REG, PD_REG, PID_REG - модули расчета настроек соответственно П-, И-, ПИ-, ПД-, ПИД-регулятора; COMPENS - модуль расчета настроек устройства компенсации; MYGRAPH - модуль работы с графикой; MY_VALID - модуль проверки корректности ввода данных; PROTWORK - модуль работы с протоколом; OBT_WORK - библиотека РАЧХ и РФЧХ типовых звеньев. Комплекс программ работоспособен на любой ПЭВМ типа IBM PC XT, AT или IBM PS/2 с 512 Кб оперативной памяти и свободным пространством на жестком диске не менее 2 Мб. Описанный комплекс программ внедрен в учебный процесс в Тверском государственном техническом университете и используется при изучении студентами курса АТПО на кафедре АТП. |
http://swsys.ru/index.php?id=1065&lang=%29&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Зарубежные базы данных по программным средствам вычислительной техники
- Функционально-информационные модели бухгалтерского учета
- Разработка загрузчика программного обеспечения встроенной системы управления
- О программной реализации геоинформационных систем
- Целесообразность применения web-служб в распределенных автоматизированных системах военного назначения