Программа исследования динамики систем управления
| Бильфельд Н.В. (bilfeld@mail.ru) - Березниковский филиал Пермского государственного технического университета, г. Пермь, Россия | |
| Ключевые слова: программа, моделирование, динамика, регулирование |
|
| Keywords: software, modeling, dynamics, control |
|
|
|
|
Для исследования динамики систем автоматического регулирования (САР) наиболее популярной является программа SIMULINK, входящая в состав интегрированной среды MATLAB.
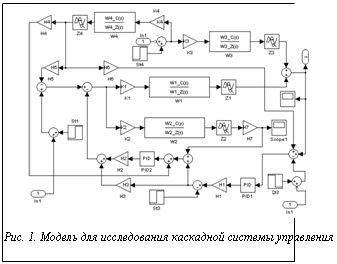
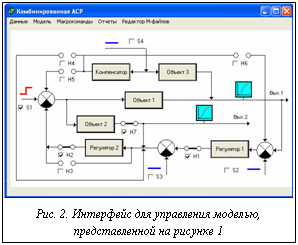
Для устранения данной проблемы разработана программа, ядром которой являются модуль связи Delphi и MATLAB, интегрирующая в себе ос- новные методы исследования САР, интерфейс которой представлен в терминах и понятиях, традиционных для систем автоматического регулирования. В частности, интерфейс модели для исследования комбинированных систем регулирования (рис. 1) имеет вид, приведенный на рисунке 2.
Запуск модели можно осуществлять циклически. При этом для любого параметра модели можно указать необходимое приращение. В частности, при щелчке по объекту открывается окно настроек, в котором указываются все его параметры и необходимые приращения (рис. 4). В группе управления графической информацией можно указать, каким образом выводить результаты, а также цвет и маркеры графиков. В качестве примера на рисунке 5 приведены графики переходных процессов, построенные в одном графическом окне для САР: · при отсутствии возмущающего воздействия; · при наличии возмущающего воздействия; · при компенсации возмущения с помощью интегрально-дифференцирующего звена. При этом пользователю нет необходимости помнить и вводить в соответствующие блоки передаточную функцию используемого компенсатора – она формируется автоматически при выборе необходимого звена из раскрывающегося списка (рис. 3). Не исключается задание пользователем любой передаточной функции компенсатора. При щелчке по блоку «компенсатор» открывается аналогичное окно настроек, как и при выборе объекта (рис. 4), в которое можно ввести любую передаточную функцию и в нем указать приращения ее параметров. Из рисунка 4 видно, что имеется возможность работы с буфером обмена, сохранения передаточных функций в файлах в различных форматах для обмена информацией с другими ранее разработанными программами и т.д.
В данной статье говорится лишь о некоторых возможностях разработанной программы. Кроме этого, в ней реализованы: · расчет показателей качества переходных процессов; · оптимизация настроечных параметров системы различными методами с возможностью графического отображения поверхности настроечных параметров; · построение практически всех частотных характеристик системы; · анализ системы в пространстве состояний с возможностью вывода матриц управляемости и наблюдаемости, а также вычисления рангов указанных матриц; · вывод передаточных функций замкнутой системы по управлению и возмущению. Использование разработанной программы значительно сокращает процесс моделирования систем управления и позволяет сосредоточить внимание на анализе полученных результатов. Круг применения данной программы может быть достаточно широким: в учебном процессе по ряду дисциплин, в инженерных, научных исследованиях. Литература 1. Ануфриев И.А. Самоучитель MatLab 5.3/6.x. СПб: Изд-во «БХВ-Петербург», 2002. 512 с. 2. Бобровский С.В. Учебный курс Delphi 7. М.: Питер, 2006. 712 с. 3. Черных И.В. Моделирование электротехнических устройств в MATLAB, SymPowerSystem и Simulink. М.: Питер, 2008. 288 с. 4. Черных И.В. Simulink: Инструмент моделирования динамических систем. URL: http://matlab.exponenta.ru/simulink/ book1/index.php (дата обращения: 13.02.2010). 5. Веремей Е.И., Погожев С.В. Nonlinear Control Design Blockset. URL: http://www.tspu.tula.ru/ivt/old_site/lcopy/Matlab_ RU/nonlinecondes/book1/preface.asp.htm (дата обращения: 13.02.2010). 6. Шмелев В.Е. Partial Differential Equations Toolbox. Инструментарий решения дифференциальных уравнений в частных. URL: http://matlab.exponenta.ru/pde/book1/index.php (дата обращения: 13.02.2010). |
 С целью эффективного исследования САР и получения сравнительных характеристик поведения системы при изменении различных ее свойств необходимо не только умение работать с данной программой, но и знание обширного круга команд и функций MATLAB, а также основ программирования в MATLAB и разработки М-файлов. Это может вызвать определенные трудности и значительно замедлить процесс исследований.
С целью эффективного исследования САР и получения сравнительных характеристик поведения системы при изменении различных ее свойств необходимо не только умение работать с данной программой, но и знание обширного круга команд и функций MATLAB, а также основ программирования в MATLAB и разработки М-файлов. Это может вызвать определенные трудности и значительно замедлить процесс исследований.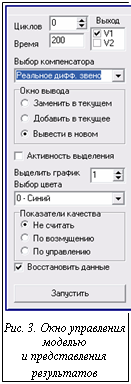 Из рисунков 1 и 2 видно, что настройка модели и необходимые коммутации осуществляются кликом мышки по соответствующему участку схемы и не требуют ввода коэффициентов в соответствующие блоки модели. Для управления моделью и представления результатов используется специальное окно настроек, приведенное на рисунке 3.
Из рисунков 1 и 2 видно, что настройка модели и необходимые коммутации осуществляются кликом мышки по соответствующему участку схемы и не требуют ввода коэффициентов в соответствующие блоки модели. Для управления моделью и представления результатов используется специальное окно настроек, приведенное на рисунке 3.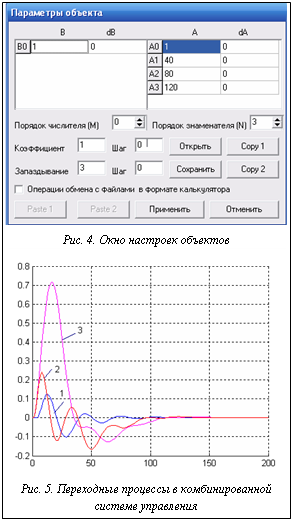 Для удобства работы в программе реализованы такие классические системы, как одноконтурная, каскадная, комбинированная, хотя любую более сложную систему легко привести к более простой путем нехитрых коммутаций. В частности, чтобы из комбинированной системы (рис. 4) перейти к одноконтурной, достаточно разомкнуть ключи H2, H4, H5, H6, H7 и замкнуть ключи H1 и H3, что осуществляется кликом мышки в районе указанного ключа (см. рис. 2).
Для удобства работы в программе реализованы такие классические системы, как одноконтурная, каскадная, комбинированная, хотя любую более сложную систему легко привести к более простой путем нехитрых коммутаций. В частности, чтобы из комбинированной системы (рис. 4) перейти к одноконтурной, достаточно разомкнуть ключи H2, H4, H5, H6, H7 и замкнуть ключи H1 и H3, что осуществляется кликом мышки в районе указанного ключа (см. рис. 2).http://swsys.ru/index.php?id=2576&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Программное определение степени затухания переходных процессов в simulink-моделях
- Программная система исследований динамики технологических процессов формования химических волокон
- Программа моделирования электронной аппаратуры при ударных воздействиях
- Моделирование аттрактора Лоренца
- Модель расчета емкости автоматического склада продукции