Применение чисел малой разрядности в задаче бинарной оптимизации
| Крыжановский М.В. (iont.niisi@gmail.com) - НИИСИ РАН, г. Москва, кандидат физико-математических наук, Мальсагов М.Ю. (magomed.malsagov@gmail.com) - Центр оптико-нейронных технологий НИИСИ РАН, Москва, Россия, кандидат физико-математических наук | |
| Ключевые слова: квадратичный функционал, минимизация, дискретизация, модель хопфилда, нейронные сети |
|
| Keywords: , minimization, discretization, singular-spectrum analysis, neural network |
|
|
|
|
В настоящей работе рассматривается задача минимизации квадратичного функционала E= –( в котором компоненты вектора Алгоритм минимизации. За основу процедуры минимизации взята нейросетевая модель Хопфилда [1]. Это полносвязная рекуррентная нейронная сеть из N нейронов, имеющих два состояния si=±1, В данном случае рассмотрим только асинхронную динамику сети Хопфилда, однозначно приводящую к минимизации функционала энергии E: на каждом такте работы сети вычисляется одна из компонент (например i-я) локального поля
и компоненте si присваивается значение
Эта процедура последовательно применяется ко всем компонентам Для уменьшения объема вычислений в [4] предложен метод дискретизации матрицы Оптимизация функционала (4) проводится аналогично оптимизации функционала (1). На каждом такте работы вычисляется одна из компонент локального поля
и ей присваивается значение
Качество такой аппроксимации будет зависеть от выбранного числа градаций и определяется функцией распределения. С увеличением числа градаций максимум функции распределения смещается влево (рис. 1), в сторону более глубоких минимумов, что увеличивает вероятность их нахождения. Так, для энергии dE=0,05 имеем: при переходе от m=1 к m=8 плотность состояний увеличится в 1,5 раза. На рисунке 1 представлены функции распределения плотности вероятности по энергии функционала (1), построенные на минимумах e( Минимум функционала. В данной работе применяется двухэтапный алгоритм [5]. Процесс минимизации функционала (1) начинается с некоторой случайной точки пространства Эффективность минимизации определяется величиной из которой следует, что разница в энергиях с ростом m убывает как dE~m–1. При этом хеммингово расстояние между минимумами функционала E и его аналога e определяется простым соотношением d=NP. Хеммингово расстояние не превышает значения d=0,11N, когда m=1, и снижается до значения d=0,02N при m=16. Сказанное подкрепляется результатами эксперимента (см. рис. 2). На рисунке кривые 1, 2, 4 – функции распределения начального состояния Работа с укороченной арифметикой Полученные результаты дают основу для применения метода дискретизации, что означает возможность применения чисел малой разрядности. При этом для хранения матричного элемента при выборе параметра m=1 достаточно 2 битов, а для m=15 – половины байта. В дальнейшем размер чисел матрицы
Ускорение алгоритма определяется величиной θ=I0/I, где I0 – исходное время работы алгоритма; I – время работы алгоритма при упакованных элементах матрицы. На рисунке 3 приведен пример увеличения скорости работы алгоритма (m=1, параметр упаковки p=8). По оси ординат отложено ускорение q, а по оси абсцисс – размерность нейросети N. С увеличением размерности нейросети ускорение алгоритма увеличивается и достигает своего предельного значения q»7,3. На скорость работы сети также влияет исходный формат чисел. Например, если элементы исходной матрицы Алгоритм расчета нейронной сети Хопфилда основан на последовательном вычислении компонент градиента На рисунке 4 показано уменьшение числа нейронов с каждой итерацией (одна итерация соответствует проверке всех N нейронов). На вертикальной оси отложена доля измененных нейронов n в процентах. Как видно из рисунка, с увеличением числа шагов число нейронов, изменяющих свое направление, становится малым. Это означает, что направление компонент В настоящее время используется другой метод расчета. В исходном состоянии
Алгоритм случайного поиска Проведем анализ быстродействия двухэтапного алгоритма при использовании упакованных данных (m=1, p=8). на первом этапе. В этом случае На первом этапе число итераций при минимизации e(
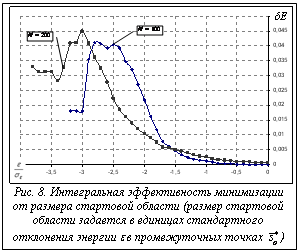
Конечно, при таком подходе велика вероятность получить несколько худшее решение, оценить которую можно экспериментально (рис. 7). Для этого распределение минимумов
Таким образом, достаточно подобрать область состояний D=dE×N<<1. (7) Поведение интегральной эффективности с увеличением длины отрезка показано на рисунке 8. На горизонтальной оси отложено расстояние от вершины функции распределения состояний Распределение состояний подчиняется нормальному закону. Доля минимумов состояний , лежащих глубже 2,0se, к общему их числу составляет 0,05. В этом случае увеличение скорости работы алгоритма составит . На основании изложенного можно сделать вывод о том, что предложенная процедура дискретизации позволяет использовать числа малой разрядности для ускорения минимизации квадратичного функционала. Авторами разработан двухэтапный алгоритм на основе нейросетевой модели Хопфилда, дающий возможность быстро находить решение поставленной задачи. Ускорение работы алгоритма составляет 5,0. Литература 1. Hopfield J.J. Neural networks and physical systems with emergent collective computational abilities // Proc. Nat. Acad. Sci. USA. 1982. Vol. 79, pp. 2554–2558. 2. Крыжановский Б.В., Магомедов Б.М., Микаэлян А.Л. Взаимосвязь глубины локального минимума и вероятности его нахождения в обобщенной модели Хопфилда // ДАН. 2005. Т. 405. № 3. С. 320–324. 3. Kryzhanovsky B.V. The shape of a local minimum and the probability of its detection in random search // Lecture Notes in Electrical Engineering. 2009. Vol. 24, pp. 51–61. 4. Крыжановский Б.В., Крыжановский М.В., Мальса- гов М.Ю. Дискретизация матрицы в задаче бинарной минимизации квадратичного функционала // ДАН. 2011. Т. 438. № 3. С. 312–317. 5. Kryzhanovsky M.V., Malsagov M.Yu. Clipping procedure in optimization problems and its generalization // Optical Memory & Neural Networks. 2009. Vol. 18. № 3, pp. 181–187. |
 ,
,  )+2×(
)+2×( ,
,  симметричная, с нулевой диагональю, а ее элементы – случайные независимые величины. Количество минимумов функционала E(
симметричная, с нулевой диагональю, а ее элементы – случайные независимые величины. Количество минимумов функционала E( . Энергия сети задана выражением (1). Такую сеть можно рассматривать как систему, решающую задачу бинарной минимизации: конвергируя в устойчивое состояние, сеть находит конфигурацию, соответствующую минимуму энергии E. Показано, что при случайном поиске вероятность отыскания какого-либо минимума экспоненциально растет с увеличением глубины этого минимума [2, 3]. Это означает, что нейросеть с подавляющей вероятностью находит если не оптимальное решение (глобальный минимум), то одно из субоптимальных (локальный минимум).
. Энергия сети задана выражением (1). Такую сеть можно рассматривать как систему, решающую задачу бинарной минимизации: конвергируя в устойчивое состояние, сеть находит конфигурацию, соответствующую минимуму энергии E. Показано, что при случайном поиске вероятность отыскания какого-либо минимума экспоненциально растет с увеличением глубины этого минимума [2, 3]. Это означает, что нейросеть с подавляющей вероятностью находит если не оптимальное решение (глобальный минимум), то одно из субоптимальных (локальный минимум).
 , (2)
, (2) . (3)
. (3) , нормированные элементы которой имеют целочисленные значения в диапазоне [–m; +m], где m – число градаций. При таком подходе поиск минимума E(
, нормированные элементы которой имеют целочисленные значения в диапазоне [–m; +m], где m – число градаций. При таком подходе поиск минимума E( , если A0=0.
, если A0=0.
 +
+ . (5)
. (5) , являющееся минимумом функционала e. Если из этой точки продолжить спуск с решающим правилом (3), то сеть конвергирует в состояние
, являющееся минимумом функционала e. Если из этой точки продолжить спуск с решающим правилом (3), то сеть конвергирует в состояние  .
. , где
, где  – энергия минимума
– энергия минимума  дискретизированного функционала;
дискретизированного функционала;  – энергия ближайшего к нему минимума
– энергия ближайшего к нему минимума  и конечного
и конечного 

 .
. в промежуточных состояниях и составляет O2=OH/2. В этом случае ускорение алгоритма составит q»1,4.
в промежуточных состояниях и составляет O2=OH/2. В этом случае ускорение алгоритма составит q»1,4.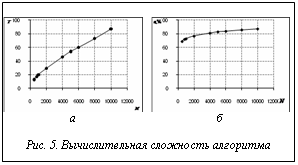

 .
. Чтобы определить границы области, состояния
Чтобы определить границы области, состояния  на отрезке, начало которого соответствует наиболее глубокому минимуму дискретизированной сети. С помощью dE можно оценить хеммингово расстояние D между глобальным минимумом
на отрезке, начало которого соответствует наиболее глубокому минимуму дискретизированной сети. С помощью dE можно оценить хеммингово расстояние D между глобальным минимумом  и самым глубоким минимумом E, найденным при стартах из отрезка. Действительно, при изменении состояния одного нейрона энергия меняется в среднем на величину e. Поскольку все минимумы при N>100 находятся в области Ec±3s и отношение se/Ec<0,01, то
и самым глубоким минимумом E, найденным при стартах из отрезка. Действительно, при изменении состояния одного нейрона энергия меняется в среднем на величину e. Поскольку все минимумы при N>100 находятся в области Ec±3s и отношение se/Ec<0,01, то Ec~eN. Тогда
Ec~eN. Тогда  .
. , для которой выполняется условие
, для которой выполняется условие , а для N=200 – глубже 2,6se; se – полуширина функции распределения дискретизированных минимумов
, а для N=200 – глубже 2,6se; se – полуширина функции распределения дискретизированных минимумов http://swsys.ru/index.php?id=2909&lang=%29&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Трехступенчатый эволюционный метод формирования коллективов нейронных сетей для решения задач классификации
- Комплекс программного обеспечения для оптимизации надежности однородных нейронных структур
- Разработка базы данных и конвертера для извлечения и анализа специализированных данных, получаемых с медицинского аппарата
- Метод адаптивной классификации изображений с использованием обучения с подкреплением
- Решение задачи прогнозирования с использованием нейронных сетей прямого распространения на примере построения прогноза роста курса акций