Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Модели управления транспортными потоками в условиях затора
Аннотация:Объектом управления в интеллектуальной транспортной системе является транспортный поток, обладающий стохастичностью поведения, нестационарностью, временными колебаниями характеристик. Для непрерывного потока выделяются такие режимы движения: свободный поток, групповое движение и насыщенный поток. Свободный поток имеет малую интенсивность движения. При групповом появляются взаимные помехи движению, режим движения неустойчив, небольшое увеличение групп в потоке может привести к уменьшению скорости и интенсивности движения – к насыщенному потоку. При изменении плотности до критической (плотности в условиях затора) интенсивность уменьшается от пропускной способности до нуля. В области критической плотности может существовать точка разрыва функции V=f(k), что приводит к скачкообразному изменению скорости движения. Незначительное увеличение интенсивности потока может привести к ситуации, когда очередь автомобилей не умещается на перегоне и скапливается в зоне перекрестка. Неустойчивость транспортного потока в области пропускной способности и распространение возмущений в потоке приводят к разрывам в значениях его характеристик, флуктуация количества транспортных средств – к неустойчивости процесса движения в зоне пропускной способности и возникновению точки бифуркации. Выбрана теория катастроф, переход от моделей которой к моделям дорожного движения состоит в изучении потерь устойчивости, определении факторов, влияющих на скачкообразное изменение параметров, в интерпретации параметров катастрофы, построении и исследовании модели. Задача распознавания, предсказания и ликвидации предзаторной ситуации, предотвращения затора актуальна в управлении транспортными потоками.
Abstract:Transport stream is a controlled object in the intellectual transportation system. Such transport stream behaves stochastically, it is unstable and its features can vary in time. Continuing stream can be divided in the following traffic conditions: free stream, group stream and intensive stream. Free stream has low stream intensity. In case group stream is characterized by hindrance to traffic, the traffic is unstable; forming of such traffic groups can lead to loss of speed and traffic intensity, which means intensive stream. When the traffic density grows to the critical point, (road congestion density) the intensity drops down from the value of traffic handling capacity to zero. The area of critical density can contain point of function discontinuity V=f(k), which leads to abrupt change of the traffic speed. Little growth in traffic intensity can lead to a situation when the car queue is not able to fit into the space interval and therefore it blocks road intersection. Unstable traffic stream in relation to traffic handling capacity and spread of the stream disturbance leads to the break of its characteristics and fluctuation of amount of vehicles results into unstable traffic arrangement in relation to traffic handling capacity and development of bifurcation point Catastrophism was selected, models provided by this theory help to develop road traffic models, which include loss of stability, discovering factors that influence abrupt change of characteristics based on catastrophe parameters, construction and study of the model. Recognition, prediction, dissolution and prevention of road congestion conditions presents vital problem in the management of traffic streams.
| Авторы: Михеева Т.И. (mikheevati@its-spc.ru) - Самарский государственный аэрокосмический университет им. академика С.П. Королева (национальный исследовательский университет) (профессор), Самара, Россия, доктор технических наук, Михеев С.В. (mikheevati@its-spc.ru) - Самарский государственный аэрокосмический университет им. академика С.П. Королева (национальный исследовательский университет (доцент), Самара, Россия, кандидат технических наук | |
| Ключевые слова: теория катастроф., точка бифуркации, критическая плотность, затор, насыщенный поток, групповое движение, свободный поток, транспортный поток, интеллектуальная транспортная система |
|
| Keywords: catastrophe theory, bifurcation point, critical density, jam, heavy traffic, group movement, light traffic, traffic flow, Intelligent Transportation System |
|
| Количество просмотров: 11213 |
Версия для печати Выпуск в формате PDF (7.64Мб) Скачать обложку в формате PDF (1.33Мб) |
Объектом управления в интеллектуальной транспортной системе (ИТС) является транспортный поток. Будучи сложным социальным объектом, он обладает рядом характерных особенностей: - стохастичностью поведения, связанной со сложностью объекта и наличием имманентных целей управления по отношению к основной цели; - нестационарностью, проявляющейся во временном изменении характеристик и параметров, описывающих поведение объекта управления; - временными колебаниями характеристик объекта, носящими устойчивый вероятностный характер с постоянными параметрами в различные временные периоды (время суток, дни недели, времена года), что связано с наличием детерминированных тенденций в движении; - многообразием (неповторяемостью) экспериментов, проявляющимся в разнице результатов при одних и тех же управляющих воздействиях на объект. Транспортный поток (ТП) описывается совокупностью признаков процесса движения – интенсивностью, скоростью, типовым составом, интервалами в потоке и некоторыми другими показателями. ТП характеризуется плотностью k(t, x) (количество транспортных средств на единицу длины дороги) и средней скоростью v(t, x)
Различают два вида средней скорости ТП: среднюю пространственную скорость vS и среднюю временную скорость vt, которые связаны следующим соотношением, выведенным для случая движения по дороге без пересечений:
где Графическое отображение уравнения (1), в котором в качестве значения скорости используется vS, представляет собой основную диаграмму ТП (рис. 1). Диаграмма построена в виде зависимостей vs=f(I) и I=f(k) для непрерывного ТП, движущегося по дороге без пересечений. Выделяются три основных режима движения: свободный поток, групповое движение и насыщенный поток. Свободный поток характеризуется малой интенсивностью движения, отсутствием взаимных помех движению между отдельными автомобилями, а скорость ТП – скоростью свободного движения v0. При небольшой плотности зависимость между скоростью и плотностью ослабевает. С повышением интенсивности движения до максимального значения Iс, соответствующего пропускной способности дороги, скорость vS изменяется до величины, определяемой точкой C на основной диаграмме. В зоне В–С (рис. 1а) появляются существенные взаимные помехи движению автомобилей, в результате чего уменьшается возможность свободного обгона и образуются группы автомобилей, движущихся с приблизительно одинаковой скоростью. Режим движения в этой зоне неустойчивый, поскольку небольшое увеличение групп в потоке может привести не только к уменьшению скорости vS, но и к переходу в область С–D, то есть к снижению интенсивности движения. Поток в области D–Е принято называть насыщенным. Характерной чертой насыщенного коллективного потока является сильный разброс величины ускорений (замедлений) относительно среднего значения. Критическая плотность потока kc – это значение, до которого с увеличением плотности k возрастает интенсивность I. При изменении плотности потока от kc до kJ – плотности потока в условиях затора – интенсивность уменьшается от максимального значения пропускной способности Ic до нуля. Скорость кинематической волны при заторной плотности определяется функциональной формой зависимости между скоростью и плотностью. В области критической плотности может существовать точка разрыва функции V=f(k), что приводит к скачкообразному изменению скорости движения. Тангенс угла a наклона вектора, проведенного из начала координат к точке, лежащей на кривой I=f(k), соответствует физическому значению скорости vs в данной точке (рис. 1 б).
1. Свободный поток. Транспортная сеть не загружена, и водители придерживаются желаемой скорости, свободно меняя полосу движения. На этой стадии движение транспортных средств (ТС) сопоставимо с потоком свободных частиц. 2. Синхронизированный поток. Транспортная сеть переполняется, водители теряют возможность свободного маневра и вынуждены согласовывать свою скорость со скоростью потока. Движение подобно потоку воды. 3. Широкие перемещающиеся заторы. ТС и их группы подобны кусочкам льда, движущимся в потоке жидкости. 4. Рассмотрим механизм образования затора (рис. 2). Пусть на рассматриваемом перегоне длиной L находится очередь из Q единиц транспорта, ожидающих права проезда через перекресток Sj, и работа этого перекрестка обеспечивает пропуск потока от Si к Sj, то есть Если длина дороги LQ, занимаемая очередью на перегоне, не больше длины перегона, то есть если LQ£L, работа перекрестка Si протекает нормально. Однако незначительное увеличение интенсивности ТП либо сбой в работе светофорной сигнализации перекрестка Sj могут привести к ситуации, когда LQ>L, то есть очередь автомобилей, проезжающих через перекресток Sj, не умещается на перегоне (i, j) и скапливается в зоне перекрестка Si. Это немедленно ведет к нарушению нормального функционирования перекрестка Si, на конфликтующих направлениях которого скапливаются ТС. Возникает положительная обратная связь по потоку, и затор лавинообразно распространяется на участок сети. Заторы подразделяются на случайные и систематические, то есть характеризующиеся периодичностью во времени и устойчивостью в пространстве. Установлено, что весь интервал це- лесообразно разделить на два подынтервала, в каждом из которых управляющие воздействия различны. Оптимальность регулирования движения достигается путем использования циклов и фаз светофорного регулирования разной длительности. Неустойчивость ТП в области пропускной способности и распространение возмущений в нем приводят к разрывам в значениях его характеристик. Теоретическое и экспериментальное изучение многими исследователями механизма резкого изменения скорости позволило установить, что при приближении к уровню пропускной способности увеличивается вероятность резкого снижения интенсивности и скорости движения. При обработке экспериментальных данных об изменении характеристик ТП в точке kc фиксируется падение скорости от верхней границы к нижней (рис. 3), при этом вероятность резкого снижения характеристик ТП возрастает от 10 % при интенсивности движения, составляющей 75 % от максимальной, до 90 % при уровне пропускной способности. Первые предположения о возможности возникновения разрывов в зависимостях между интенсивностью, плотностью и скоростью высказаны Л. Эдаем в 1961 г. Для описания разрывов используются макромодели, имеющие разрыв в точке kc: одна модель – для низкой плотности kkc. Наибольшее применение нашли следующие типы разрывных макромоделей:
Флуктуация количества ТС приводит к неустойчивости процесса движения в зоне пропускной способности и к возникновению точки бифуркации. В этой связи основным направлением реализации полученных знаний выбрана теория катастроф. Переход от моделей теории катастроф к моделям дорожного движения состоит в изучении потерь устойчивости, определении факторов, влияющих на скачкообразное изменение параметров, в интерпретации параметров катастрофы, построении и исследовании модели. Одной из важнейших функций ИТС является предотвращение транспортных заторов. По мере роста затор не только останавливает движение первоначально вовлеченных в него ТП, но и влияет на потоки на других улицах. Поэтому задача управления – предупреждение и возникновения, и распространения заторов. Проблема управления насыщенными ТП осложняется тем, что трудно локализовать заторы в границах их первоначального возникновения. Затор – особая ситуация на УДС, при которой среднее время задержки D ТС превышает длительность цикла T.
В этой связи актуальной в управлении ТП, не допускающем возникновения затора, является задача распознавания, предсказания и ликвидации предзаторной ситуации. Решение проецируется на область устранения причин, вызывающих перегрузки узких участков УДС, путем перераспределения ТП. Система управления ТП должна своевременно в определенных точках УДС информировать водителей о возможности попадания в затор и рекомендовать какие-либо объездные маршруты следования, позволяющие обойти перегруженный участок сети. Зоны неустойчивости поведения ТП, существующие в области пропускной способности, не- затухающие возмущения скорости приводят к разрывам в значениях характеристик ТП. В этих случаях ТС в потоке вынуждены неоднократно трогаться с места и останавливаться. Небольшие изменения интенсивности движения распространяются вдоль потока ТС в виде кинематических волн, которые могут накладываться друг на друга и вызывать появление ударных волн, создающих большие перепады скорости в сторону ее уменьшения. Ударные волны распространяются против движения и образуются на участках с пониженной пропускной способностью – в узких местах. Будем полагать, что плотности соседних участков
Решая уравнение относительно vw, получим
где Ii и In – интенсивность движения на участках Для малых изменений плотности k скорость vd передвижения граничной точки определяется уравнением (4), то есть
Для модели Гриншилдса величины vw и vd определяют по формулам:
Из уравнения (8) следует, что скорость граничной точки vd при пренебрежимо малом изменении k (или v) удовлетворяет условиям
При распространении ударной волны в ТП часть волны Для свободного режима движения ТП можно использовать экспоненциальную зависимость скорости от плотности. В подтверждение метода, учитывающего наличие разрывов, определены три зоны: постоянной скорости, постоянной интенсивности, а также зона постоянного изменения интенсивности в зависимости от плотности. В первой зоне скорость ТС определяется состоянием самой УДС, а интенсивность соответствует предъявляемым к УДС требованиям. Во второй зоне ожидаются сбои в режиме движения: средняя скорость падает, в то время как интенсивность можно поддерживать на высоком уровне. В третьей зоне (старт-стопное движение) скорость и интенсивность падают, что само по себе может являться определением затора. Затор возникает в том случае, когда в транспортной сети на некоторых перегонах образуются очереди, длина которых LQ оказывается больше длины L соответствующих перегонов. Поэтому управление в вынужденном режиме движения прежде всего должно быть направлено на создание таких условий движения, при которых удовлетворяются ограничения LQ£L для всех перегонов УДС. Рассмотрим УДС Q¹Æ, содержащую N участков Вне области предполагаемых заторов выделим некоторое количество участков
где ai и a0 – коэффициенты. Суммирование ведется по всем участкам УДС, не принадлежащим зоне предполагаемых заторов. Для прогнозирования интенсивностей Если при прогнозировании окажется, что LQ>L, это будет означать возможность появления затора на перегоне к моменту времени t. Транспортную ситуацию, возникшую в момент времени t–Dt, назовем предзаторной. Литература 1. Автомобильные перевозки и организация дорожного движения: Справочник / В.У. Рэнкин, П. Клафи, С. Халюерт [и др.]. М.: Транспорт, 1981. 592 с. 2. Арнольд В.И. Теория катастроф. М.: Наука. Глав. ред. Физматлит, 1990. 128 с. 3. Артынов А.П., Кондратьев Г.А. Управление взаимодействием транспортных систем. М.: Наука, 1986. 197 с. 4. Вероятностные и имитационные подходы к оптимизации автодорожного движения / А.П. Буслаев, А.В. Новиков, В.М. Приходько [и др.]. М.: Мир, 2003. 368 с. 5. Зырянов В.В., Кочерга В.Г. Моделирование транспортных потоков на городской сети // Организация и безопасность дорожного движения в крупных городах. СПб: СПб ГАСУ, 2006. С. 193–197. 6. Семенов В.В. Математическое моделирование динамики транспортных потоков мегаполиса. М.: ИПМ РАН, 2004. 7. Михеева Т.И. Структурно-параметрический синтез интеллектуальных транспортных систем. Самара: СНЦ РАН, 2008. 380 с. 8. Mikheeva T.I., Mikheev S.V. Model of zone control of traffic flows / Computer Science and Information Technologies // Proceedings of the 10th International Workshop. Vol. 2. Antalya, Turkey, 2008. pp. 121‑128. 9. Моделирование процессов управления транспортными потоками / Т.И. Михеева, С.В. Михеев, И.А. Рудаков [и др.] // Актуальные проблемы автотранспортного комплекса: межвуз. сб. науч. стат. Самара, СГТУ, 2010. С. 205–211. |
 . (1)
. (1) , (2)
, (2) – дисперсия средней пространственной скорости; vS – средняя пространственная скорость, то есть средняя скорость n автомобилей, находящихся на заданном участке дороги в определенный момент времени; vt – средняя временная скорость, то есть средняя скорость n автомобилей, проходящих через заданное сечение дороги за определенный промежуток времени.
– дисперсия средней пространственной скорости; vS – средняя пространственная скорость, то есть средняя скорость n автомобилей, находящихся на заданном участке дороги в определенный момент времени; vt – средняя временная скорость, то есть средняя скорость n автомобилей, проходящих через заданное сечение дороги за определенный промежуток времени.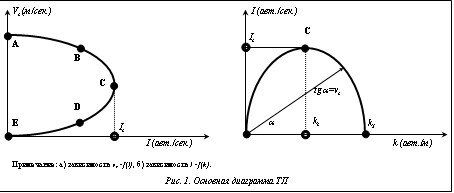 Классификация фаз движения ТП основана на классификации состояний вещества: газообразное, жидкое, твердое.
Классификация фаз движения ТП основана на классификации состояний вещества: газообразное, жидкое, твердое.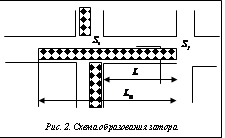 Старт-стопное движение. При большом скоплении ТС движение ТП приобретает прерывистый характер. На этой стадии ТП можно уподобить потоку замерзающей воды: ТС становятся на какой-то промежуток времени как бы примерзшими к какой-либо точке улично-дорожной сети (УДС).
Старт-стопное движение. При большом скоплении ТС движение ТП приобретает прерывистый характер. На этой стадии ТП можно уподобить потоку замерзающей воды: ТС становятся на какой-то промежуток времени как бы примерзшими к какой-либо точке улично-дорожной сети (УДС). (пропускная способность перекрестка больше интенсивности прибывающего на него ТП).
(пропускная способность перекрестка больше интенсивности прибывающего на него ТП).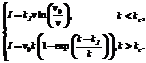 (3)
(3) Заторы могут быть разовыми (случайными) и систематическими (устойчивыми). Причиной возникновения разовых заторов являются случайные факторы, например, ДТП, аварийно-восстановительные работы на УДС и т.д. Для систематических заторов характерны периодичность во времени и устойчивость в пространстве. Такие заторы возникают на определенных направлениях движения на одних и тех же участках УДС в определенные интервалы времени, чаще всего в часы пик.
Заторы могут быть разовыми (случайными) и систематическими (устойчивыми). Причиной возникновения разовых заторов являются случайные факторы, например, ДТП, аварийно-восстановительные работы на УДС и т.д. Для систематических заторов характерны периодичность во времени и устойчивость в пространстве. Такие заторы возникают на определенных направлениях движения на одних и тех же участках УДС в определенные интервалы времени, чаще всего в часы пик. и
и  УДС различны. Обозначим плотность и скорость движения на участках
УДС различны. Обозначим плотность и скорость движения на участках  . (4)
. (4)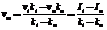 , (5)
, (5) соответственно.
соответственно. ,
, . (6)
. (6) , (7)
, (7) . (8)
. (8) (9)
(9) будет двигаться назад – в направлении, противоположном движению потока, другая часть волны – вперед, в направлении потока. При образовании ударной волны происходят резкие изменения плотности вплоть до разрыва, автомобили вынуждены замедлять скорость или останавливаться.
будет двигаться назад – в направлении, противоположном движению потока, другая часть волны – вперед, в направлении потока. При образовании ударной волны происходят резкие изменения плотности вплоть до разрыва, автомобили вынуждены замедлять скорость или останавливаться. и др. Будем считать известными параметры УДС, ТП и алгоритмы работы светофорной сигнализации. Анализ снимков интенсивности
и др. Будем считать известными параметры УДС, ТП и алгоритмы работы светофорной сигнализации. Анализ снимков интенсивности  позволяет заблаговременно выявить зоны, в которых наблюдаются режимы перенасыщенного движения.
позволяет заблаговременно выявить зоны, в которых наблюдаются режимы перенасыщенного движения. с дискретностью Dt. Снимок интенсивностей в момент времени t–Dt в зоне предполагаемого затора позволяет определить значение интенсивности, которое сложится к моменту времени t на дуге
с дискретностью Dt. Снимок интенсивностей в момент времени t–Dt в зоне предполагаемого затора позволяет определить значение интенсивности, которое сложится к моменту времени t на дуге  графа УДС:
графа УДС: , (10)
, (10) в областях, подверженных заторам, в системе управления необходимо хранить и периодически обновлять значения коэффициентов ai и a0, входящих в уравнение регрессии. По вычисленным значениям
в областях, подверженных заторам, в системе управления необходимо хранить и периодически обновлять значения коэффициентов ai и a0, входящих в уравнение регрессии. По вычисленным значениям  и при известных режимах работы светофорных объектов несложно вычислить длины очереди LQ ТС на перегонах в момент времени t.
и при известных режимах работы светофорных объектов несложно вычислить длины очереди LQ ТС на перегонах в момент времени t.| Постоянный адрес статьи: http://swsys.ru/index.php?id=3213&like=1&page=article |
Версия для печати Выпуск в формате PDF (7.64Мб) Скачать обложку в формате PDF (1.33Мб) |
| Статья опубликована в выпуске журнала № 3 за 2012 год. [ на стр. 50-55 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Автоматизированное детектирование и классификация объектов в транспортном потоке на спутниковых снимках города
- Системный анализ и принятие решений о реинжиниринге корпоративных информационно-управляющих систем
- Интеллектуальная система анализа транспортных потоков в автоматизированных системах управления дорожным движением
- Процедура автоматического безрадарного определения скорости мобильных объектов с использованием стационарной камеры
Назад, к списку статей