Программное обеспечение тренажера лапароскопической хирургии
| Колсанов А.В. (avkolsanov@mail.ru) - Самарский государственный медицинский университет (профессор), г. Самара, Россия, доктор математических наук, Чаплыгин С.С. (chaplyginss@mail.ru) - Самарский государственный медицинский университет (ассистент ), г. Самара, Россия, Иващенко А.В. (anton-ivashenko@yandex.ru) - Самарский государственный аэрокосмический университет им. академика С.П. Королева (национальный исследовательский университет) (профессор), Самара, Россия, доктор технических наук, Кузьмин А.В. (flickerlight@inbox.ru) - Научно-производственная компания «Маджента Девелопмент» (Заместитель главного конструктора ), нет, Россия, Горбаченко Н.А. (eaglegor@gmail.com) - Самарский государственный аэрокосмический университет им. академика С.П. Королева (национальный исследовательский университет), г. Самара (аспирант), Самара, Россия, Милюткин М.Г. (milutkin@magenta-technology.ru) - Научно-производственная компания «Маджента Девелопмент» (вед. инженер-программист), нет, Россия | |
| Ключевые слова: хирургия., симуляционное обучение, моделирование, аппаратно-программный комплекс |
|
| Keywords: surgery, simulation training, modeling, hardware and software |
|
|
|
|
Симуляционное обучение в медицине – это вид учебной деятельности, направленной на освоение обучающимися всех категорий практических навыков, комплексных умений и отработку командных действий при оказании медицинской помощи на основе применения симуляционных моделей: роботов-симуляторов пациента, виртуальных тренажеров, муляжей, фантомов и манекенов. Симуляционные технологии в медицине являются новым для российского здравоохранения форматом обучения с выраженным практическим акцентом, эффективно формирующим в участниках прикладные навыки через погружение в реальность [1]. В связи с этим актуальна задача разработки и внедрения современных технологий симуляционного обучения в медицинских вузах [2, 3]. Обладающие высокой реалистичностью медицинские тренажеры [4] для обучения врачей-хирургов навыкам и умениям, необходимым для эндохирургического вмешательства, достаточно дороги и при этом не позволяют в полной мере моделировать обратную связь, что существенно снижает достоверность тактильных ощущений. С целью устранения этого недостатка был разработан аппаратно-программный комплекс «Виртуальный хирург» [5] для 3D-моделирования операционного процесса и системного обучения врача-хирурга методикам эндоскопической хирургии на этапах додипломного и последипломного образования. Комплекс универсален, он может применяться для отработки базовых навыков и для освоения методик проведения операций, включая тактику при возникающих осложнениях. Возможность неограниченного повторения упражнений позволяет использовать комплекс для закрепления навыков. Наличие алгоритмов оценки качества в составе учебно-методических модулей комплекса дает возможность объективно оценивать результаты тренировок.
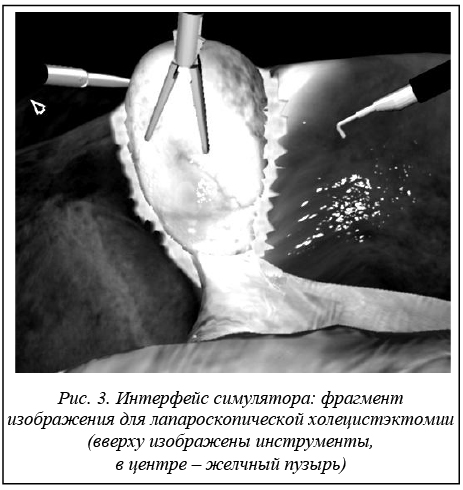
Система разделена на следующие основные модули: - модуль 3D-визуализации позволяет визуализировать операционное поле, включая органы, инструменты, течение жидкостей; - модуль физики обеспечивает реализацию модели физического взаимодействия в рамках операционного поля, включая обнаружение случаев взаимодействия объектов операционного поля между собой (столкновений), определение изменений в положении (перемещение) и в геометрии (деформация) объектов операционного поля, изменение топологии объектов операционного поля (нарушение целостности), обработку дискретных событий, изменяющих физическую модель операционного поля (клипирование, отрезание, коагуляция, смена инструмента и т.д.), регистрацию событий взаимодействия инструментов с объектами операционного поля с требуемой детализацией для дальнейшей обработки в модуле управления операцией, а также расчет положений и сил при взаимодействии инструментов с объектами операционного поля; - модуль взаимодействия с манипуляторами дает возможность обмениваться информацией с манипуляторами с максимально возможной частотой; - модуль управления операцией обеспечивает высокоуровневое управление всеми остальными модулями в соответствии с логикой операции, включая отслеживание и регистрацию существенных для хода операции событий, определение качественных и количественных показателей, используемых для оценки операции, отслеживание критериев аварийного завершения операции, моделирование действий хирурга, реализованных за пределами манипуляторов (например смена инструмента), и реализацию интерфейса управления операцией. ПО комплекса реализовано с использованием современных технологий для построения и моделирования 3D-сред и физических свойств материалов: USB HID, DirectInput, SDL, OpenGL, Direct3D, OpenCL, DirectCompute, CUDA, PhysX, Havok. На рисунке 1 приведена диаграмма классов UML, иллюстрирующая особенности реализации ПО тренажера. После заг Изображение на мониторе строится на основании отслеженных изменений положения манипуляторов и команд пользователя. На рисунке 3 приведен пример моделирования лапароскопической холецистэктомии. Обратные силовые реакции манипуляторов имитируют сопротивление тканей и инструментов, создавая на рукоятках управления силы сопротивления, пропорциональные приложенным пользователем усилиям и рассчитанные по заложенным критериям сопротивления тканей и инструментов. По окончании симуляции на экран выводятся результаты работы пользователя в виде текста. Пользователь с правами администратора может выбирать методики и уровень сложности симуляции, а также распечатывать результаты.
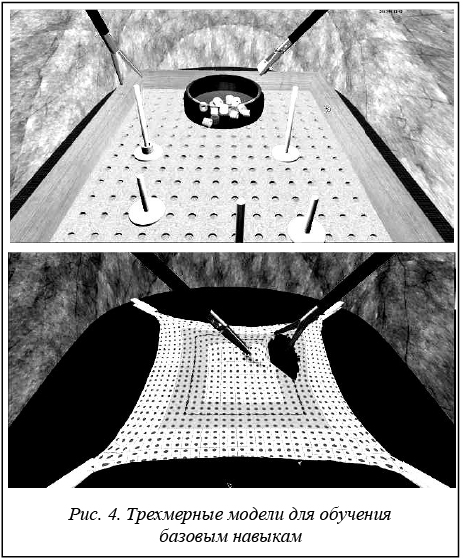
Следует отметить возможность оттачивания базовых навыков владения эндоскопическими инструментами. Это самый первый шаг в освоении лапароскопии, на котором в процессе выполнения нескольких упражнений студент знакомится с основными возможностями инструментов, учится правильно манипулировать ими, верно определять взаимное расположение объектов по изображению, получаемому с камеры, контролировать движение инструментов, а также координировать взаимодействие камеры и инструментов. Реализация базовых навыков потребовала разработки новых алгоритмов моделирования физических тел трехмерной сцены и обработки случаев их столкновений (см. рис. 4). Разработанные технологии 3D-моделирования операционного процесса и учебно-методические модули позволяют обеспечить системное обучение врача-хирурга методикам эндоскопической хирургии на этапах додипломного и последипломного образования. Использование его в учебном процессе позволяет повысить качество подготовки медицинских специалистов. Литература 1. Филимонов В.С., Талибов О.Б., Верткин А.Л. Эффективность симуляционной технологии обучения врачей по ведению пациентов в критических ситуациях // Врач скорой помощи. 2010. № 6. С. 9–19. 2. Свистунов А.А., Коссович М.А., Васильев М.В., Шубина Л.Б., Грибков Д.М. Оптимизация обучения лапароскопической хирургии в условиях центра непрерывного профессионального образования // Виртуальные технологии в медицине. 2012. № 1 (7). С. 27–34. 3. Колсанов А.В., Юнусов Р.Р., Яремин Б.И., Чаплыгин С.С., Воронин А.С., Грачев Б.Д., Дубинин А.А., Назарян А.К. Разработка и внедрение современных медицинских технологий в систему медицинского образования // Врач-аспирант. 2012. № 2.4 (51). С. 584–588. 4. Горшков М.Д., Федоров А.В. Классификация по уровням реалистичности оборудования для обучения эндохирургии // Виртуальные технологии в медицине. 2012. № 1(7). С. 35–39. 5. Батраков М.Ю., Горбаченко Н.А., Зайцев Д.Ю., Сапцин Н.В., Иващенко А.В., Чаплыгин С.С., Колсанов А.В. Тренажер для симуляционного обучения эндоскопическому оперативному вмешательству // Перспективные информационные технологии в научных исследованиях, проектировании и обучении (ПИТ 2012): тр. науч.-технич. конф. Самара: СНЦ РАН, 2012. С. 269–273. |
 При разработке программной части использована модульная архитектура с четко определенными потоками данных между модулями. Это позволяет вносить изменения в реализацию каждого модуля независимо от других при условии, что объем передаваемых данных не меняется.
При разработке программной части использована модульная архитектура с четко определенными потоками данных между модулями. Это позволяет вносить изменения в реализацию каждого модуля независимо от других при условии, что объем передаваемых данных не меняется.
http://swsys.ru/index.php?id=3508&lang=%E2%8C%A9%3Den&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Программное обеспечение тренажера эндоваскулярной хирургии
- Моделирование информационных процессов систем управления большими данными для решения задач кибербезопасности
- Программный комплекс обнаружения аномалий формы рельсовых путей
- Моделирование систем массового обслуживания с абсолютным приоритетом
- Программа идентификации условий теплообмена для изделий плоской формы