Интеллектуальное управление роботом-манипулятором на основе мягких вычислений
| Николаева А.В. (nikolaevaav@lenta.ru) - Международный университет природы, общества и человека «Дубна», Институт системного анализа и управления (аспирант), г. Дубна, Россия, Ульянов С.В. (ulyanovsv46_46@mail.ru) - Государственный университет «Дубна» – Институт системного анализа и управления, Объединенный институт ядерных исследований – лаборатория информационных технологий (профессор), Дубна, Россия, доктор физико-математических наук | |
| Ключевые слова: технологии мягких вычислений, база знаний, нечеткий регулятор, интеллектуальная система управления |
|
| Keywords: soft computing technology, knowledge base, fuzzy controller, intelligent control system |
|
|
|
|
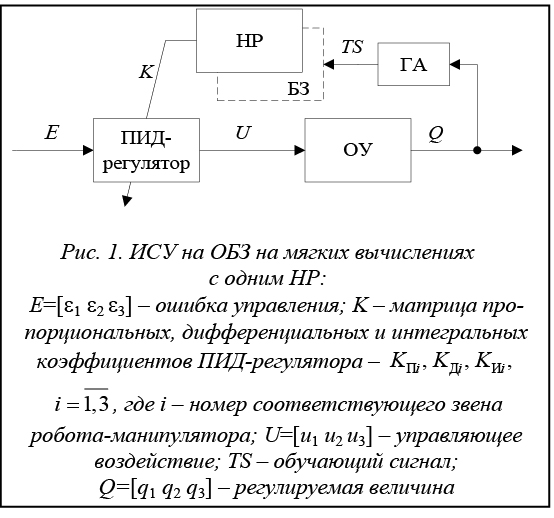
Принципиальной особенностью в построении многозвенных манипуляционных устройств является модульность, которая обеспечивает адаптивность и реконфигурируемость динамической структуры в соответствии с решаемой задачей [1–3]. Увеличение сложности структур объектов управления и трудности прогнозирования непредвиденных ситуаций управления усиливают внимание к поиску решения задачи гарантированного управления в условиях риска возникновения нештатных ситуаций. Построение интеллектуальной системы управления (ИСУ) роботом-манипулятором возможно с применением технологий мягких вычислений. Структуры интеллектуальных систем управления с применением технологий мягких вычислений Основным элементом ИСУ с применением технологий мягких вычислений [4, 5] является нечеткий регулятор (НР), управляющий коэффициентами усиления регулятора. НР осуществляет управление коэффициентами усиления регулятора за счет интегрированной в него базы знаний (БЗ), включающей данные о виде и параметрах функций принадлежности входных и выходных нечетких переменных, а также набор нечетких продукционных правил. В качестве регулятора используем пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) как наиболее распространенный [6, 7]. Создание БЗ для НР производится с помощью Оптимизатора баз знаний (ОБЗ) на основе мягких вычислений в следующей последовательности: – создание обучающего сигнала – определение типовой ситуации управления (например штатной ситуации), формирование таблицы коэффициентов ПИД-регулятора и ошибок управления с помощью генетического алгоритма (ГА); – формирование модели нечеткого вывода – определение типа нечеткой модели, интерпретации нечетких операций, числа входных и выходных переменных; – создание лингвистических переменных для входных значений; – создание базы правил; – настройка базы правил; – оптимизация левых и правых частей пра- вил БЗ.
На рисунке 1 приведена прямая цепь структуры ИСУ на основе ОБЗ с применением технологий мягких вычислений для управления роботом-манипулятором с тремя степенями свободы. ИСУ на ОБЗ на мягких вычислениях с единой БЗ, заложенной в НР, позволяет собрать информацию о взаимном поведении одновременно трех звеньев робота-манипулятора в единую БЗ, однако высокая сложность реализуемой БЗ требует значительных вычислительных ресурсов для создания и размещения. В [8] приводится зависимость максимального числа нечетких правил создаваемой БЗ от числа степеней свободы робота-манипулятора. Упростить процесс проектирования ИСУ и снизить требования к вычислительным ресурсам возможно путем декомпозиции управления – разделения единой БЗ на несколько независимых. Однако в результате рассогласования работы разделенных независимых БЗ несколько снижается качество управления. ИСУ с разделенным управлением на основе технологий мягких вычислений для управления манипулятором с тремя степенями свободы и с применением на нижнем исполнительном уровне ПИД-регулятора представлена на рисунке 2.
Оценка работы рассмотренных ИСУ производится по результатам MatLab/Simulink-моделирования и по результатам серии экспериментов на физическом ОУ. Реализация системы управления роботом-манипулятором с тремя степенями свободы Для исследования качества систем управления был разработан макет робота-манипулятора с тремя степенями свободы (рис. 3). В отличие от традиционного подхода в данной работе поведение звеньев макета робота-манипулятора было формализовано таблицами соответствий, что позволило описать поведение робота в среде MatLab/Simulink, то есть была создана модель реального ОУ без привлечения математической модели манипулятора. Это позволило ускорить идентификацию модели ОУ и получение приемлемых параметров управления для разных типов систем управления и с различным уровнем интеллектуальности.
– решение задачи позиционирования в штатных ситуациях управления; – решение задачи позиционирования в непредвиденных ситуациях управления; – быстродействие; – относительное значение перерегулирования; – относительная ошибка позиционирования звеньев; – время одной итерации; – сложность реализации управления; – общая оценка управления. Методика проведения экспериментов приведена в [8]. Работу рассмотренных ИСУ на ОБЗ на основе мягких вычислений (с одним НР и с разделенным управлением) рассмотрим в сравнении с системой управления с постоянными коэффициентами ПИД-регулятора, подобранными с помощью ГА. В таблице приведено сравнение ИСУ на ОБЗ на мягких вычислениях с системой управления на ГА соответственно для MatLab/Simulink-модели и физического макета робота-манипулятора по введенному ряду критериев качества. Из результатов сравнения видно, что при использовании ИСУ на ОБЗ на мягких вычислениях в отличие от системы управления на ГА задача управления решается как для штатных, так и непредвиденных ситуаций управления, значительно увеличивается быстродействие, улучшается показатель точности позиционирования, однако увеличивается сложность реализации управления. В результате использования ИСУ на ОБЗ на мягких вычислениях с разделенным управлением по сравнению с ИСУ на ОБЗ на мягких вычислениях с одним НР все показатели качества несколько ухудшаются, что происходит из-за рассогласования работы разделенных независимых БЗ. Продемонстрируем работу рассмотренных ИСУ с применением технологий мягких вычислений (с одним НР) в условиях непредвиденных ситуаций управления (рис. 4) по сравнению с системой управления на ГА. В качестве непредвиденной выступает ситуация, одновременно включающая внешнее воздействие (принудительное перемещение второго звена) и внутренние изменения регулирующего звена (ограничение управляющего воздействия). Как видно из рисунка 4, в отличие от системы управления на ГА ИСУ на ОБЗ на мягких вычислениях справляется с задачей точного позиционирования за малое число итераций. Рассмотрим законы управления (рис. 5), формируемые описанными типами систем управления. Из рисунка видно, что законы управления, формируемые системой управления на ГА, для первого и третьего звеньев имеют заведомо большую амплитуду по сравнению с аналогичными законами управления, формируемыми ИСУ на ОБЗ на мягких вычислениях, однако для второго звена в законе управления, формируемом системой управления на ГА, не отражается реакция на внешнее воздействие, в результате чего задача точного позиционирования не решается. Законы управления, формируемые ИСУ на ОБЗ на мягких вычислениях с разделенным управлением, по сравнению с ИСУ на ОБЗ на мягких вычислениях с одним НР при сравнимой амплитуде имеют большее перерегулирование. Таким образом, минимальный расход полезного ресурса при формировании законов управления В результате сравнения работы рассмотренных типов систем управления можно сделать следующие выводы: – структура системы управления на основе ГА проста для реализации, однако вследствие постоянства параметров управления решение задачи точного позиционирования возможно только для части штатных ситуаций (для которых были подобраны коэффициенты ПИД-регулятора); – единая БЗ ИСУ на ОБЗ на мягких вычислениях с одним НР содержит наиболее полную информацию о поведении всех звеньев, что позволяет ИСУ работать как в штатных, так и в непредвиденных ситуациях управления; однако создание единой БЗ – сложный и длительный процесс, требующий значительных вычислительных ресурсов, а в дальнейшем и большого объема памяти для размещения БЗ; – Влияние рассогласования управления в структуре ИСУ на ОБЗ на мягких вычислениях с разделенным управлением может быть снижено организацией координационного управления путем введения дополнительного согласующего звена, реализация которого возможна с применением технологий квантовых вычислений. Опыт применения ОБЗ на мягких вычислениях показал повышенную эффективность по сравнению с инструментарием ANFIS в среде MatLab [9]. Литература 1. International assessment of research and development in robotics. WTEC Panel Report, 2006. 2. Lewis F.L., Munro N. Robot Manipulator Control, NY, 2004, 607 p. 3. Черноусько Ф.Л., Болотник Н.Н., Градецкий В.Г. Манипуляционные роботы: динамика, управление, оптимизация. М.: Наука, 1989. 368 с. 4. Ульянов С.В., Литвинцева Л.В., Добрынин В.Н., Мишин А.А. Интеллектуальное робастное управление: технологии мягких вычислений. М.: ВНИИгеосистем, 2011. 408 с. 5. Zadeh L.A. Fuzzy Logic, Neural Networks, and Soft Computing. Communications of the ACM, 1994, vol. 37, no. 3, pp. 77–84. 6. Yu W., Rosen J. Neural PID Control of Robot Manipulators with Application to an Upper Limb Exoskeleton. Cybernetics, IEEE Transactions, 2013, vol. 43, no. 2. 7. Meza J.L., Santibáñez V., Soto R., Llama M.A. Fuzzy Self-Tuning PID Semiglobal Regulator for Robot Manipulators. Industrial Electronics, IEEE Transactions, 2012, vol. 59, no. 6. 8. Николаева А.В., Ульянов С.В. Проектирование интеллектуальной системы управления роботом-манипулятором. Ч. 2: Декомпозиция управления и физический эксперимент на основе технологии мягких вычислений // Системный анализ в науке и образовании: сетевое научное издание. 2013. № 1. С. 1–22. 9. Patel J., Gianchandani R. ANFIS control for robotic manipulators: Adaptive neuro fuzzy inference systems for intelligent control. LAP Lambert Academic Publ., 2011. References 1. International assessment of research and development in robotics. WTEC Panel Report, 2006. 2. Lewis F.L., Munro N. Robot Manipulator Control. NY, 2004, 607 p. 3. Chernousko F.L., Bolotnik N.N., Gradeckiy V.G. Manipulyatsionnye roboty: dinamika, upravlenie, optimizatsiya [Manipulation Robots: Dynamics, control, optimization]. Moscow, Nauka Publ., 1989, 368 p. 4. Ulyanov S.V., Litvintseva L.V., Dobrynin V.N., Mi- shin A.A. Intellektualnoe robastnoe upravlenie: tekhnologii myagkikh vychisleniy [Intelligent robust control: soft computing technology]. Moscow, VNIIgeosystem Publ., 2011, 408 p. 5. Zadeh L.A. Fuzzy Logic, Neural Networks, and Soft Computing. Communications of the ACM. 1994, vol. 37, no. 3, pp. 77–84. 6. Yu W., Rosen J. Neural PID Control of Robot Manipulators with Application to an Upper Limb Exoskeleton. Cybernetics, IEEE Transactions. 2013, vol. 43, no. 2. 7. Meza J.L., Santibáñez V., Soto R., Llama M.A. Fuzzy Self-Tuning PID Semiglobal Regulator for Robot Manipulators. Industrial Electronics, IEEE Transactions. 2012, vol. 59, no. 6. 8. Nikolaeva A.V., Ulyanov S.V. Intelligent control system of a robot manipulator. Pt. 2. Control decomposition and physical experiment based on soft computing technology. Sistemny analiz v nauke i obrazovanii [System analysis in science and education]. 2013, no. 1, pp. 1–22 (in Russ.). 9. Patel J., Gianchandani R. ANFIS control for robotic manipulators: Adaptive neuro fuzzy inference systems for intelligent control. LAP Lambert Academic Publ., 2011. |
 Используется способ декомпозиции управления, когда каждый НР с заложенной БЗ отвечает за управление одним звеном.
Используется способ декомпозиции управления, когда каждый НР с заложенной БЗ отвечает за управление одним звеном. Для оценки работы систем управления (как для MatLab/Simulink-моделей, так и для физического макета) введена хорошо известная система критериев качества, учитывающая методы оценки переходных процессов теории автоматического управления. Данные методы были адаптированы для рассматриваемого ОУ в следующем виде:
Для оценки работы систем управления (как для MatLab/Simulink-моделей, так и для физического макета) введена хорошо известная система критериев качества, учитывающая методы оценки переходных процессов теории автоматического управления. Данные методы были адаптированы для рассматриваемого ОУ в следующем виде:
http://swsys.ru/index.php?id=3677&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Интеллектуальная система управления избыточным роботом-манипулятором c семью степенями свободы на основе мягких вычислений
- Интеллектуальное робастное управление роботом-манипулятором на основе квантовых мягких вычислений
- Общий подход к проведению компьютерных экспериментов по индуктивному формированию знаний
- Метод синтеза нечетких регуляторов на основе кластеризации
- Логический анализ корректирующих операций для построения качественного алгоритма распознавания