Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Вопросы применения подсистемы САПР устройств метеорологической поддержки замкнутой системы управления «Природа–Техногеника»
Аннотация:Выбрасываемые в атмосферу вредные примеси не только уничтожают живую природу и отрицательно воздействуют на здоровье людей, но и изменяют свойства самой атмосферы, что может привести к нежелательным экологическим и климатическим последствиям. Поэтому проблема снижения загрязняющих веществ в настоящее время особо актуальна. Решить ее возможно с помощью замкнутой системы управления «Природа–Техногеника» (ПТ), обеспечивающей минимизацию загрязняющих веществ, поступающих от техногенных объектов, путем регулирования агрегатов очистки источников этих загрязняющих веществ. Содержание загрязняющих веществ в потоке атмосферного воздуха в значительной степени обусловлено метеорологическими условиями, а именно: скоростью и направлением ветра, температурой, влажностью, давлением. Эти факторы влияют на накопление, перенос и рассеивание вредных веществ. В этой связи задачей управления в замкну-той системе управления ПТ является непрерывное обеспечение метеорологической поддержки. Для этого необходимо разработать устройства метеорологической поддержки, включающие блоки накопления, обработки метеорологических данных, ввода их в блок управления очистными агрегатами с целью компенсации нежелательных отклонений от заданных критериев устойчивости и качества замкнутой системы управления ПТ как системы автоматического управления. Решение этой задачи невозможно без разработки и применения САПР устройства метеорологической поддержки. Данная статья посвящена процессу создания и тестирования подсистемы САПР устройства метеорологической поддержки, являющейся необходимым инструментом проектирования замкнутой системы управления ПТ.
Abstract:Emitted to the air harmful impurities not only destroy wildlife and have a negative impact on human health, but are also able to change atmosphere properties, which can lead to undesirable environmental and climatic consequences. Therefore, nowadays the problem of reducing pollutants has become especially important. This problem can be solved by a closed control system “Nature–Technogenic” (CCS NT), which ensures minimization of pollutants from technogenic objects by regulating cleaning aggregates for these pollutant sources. The content of pollutants in air flow is largely influenced by the meteorological conditions, such as the speed and wind direction (V), temperature (T°), humidity (W), pressure (P). They affect the accumulation and dispersion of harmful substanc-es. In this connection, the problem of control in CCS NT is continuous provision of meteorological support. Therefore, it is necessary to develop the devices of meteorological support (DMS), including blocks of accumulation, meteorological data processing, input into the control block for treatment units in order to compensate unwanted deviation from given criteria of sustainability and quality of CCS NT as the ACS. The solution of this task is impossible without development and application of CAD DMS. The article describes the process of creating and testing CAD DMS subsystem, which is a necessary tool to design CCS NT.
| Авторы: До Суан Чо (doxuancholeti@gmail.com) - Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина) (аспирант ), Санкт-Петербург, Россия, Сольницев Р.И. (remira70@mail.ru) - Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина) (профессор), г. Санкт-Петербург, Россия, доктор технических наук | |
| Ключевые слова: под-система, устройство, сапр, метеорологическое обеспечение, загрязняющие вещества, экология |
|
| Keywords: , device, CAD system, meteorological support, pollutants, ecology |
|
| Количество просмотров: 10272 |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
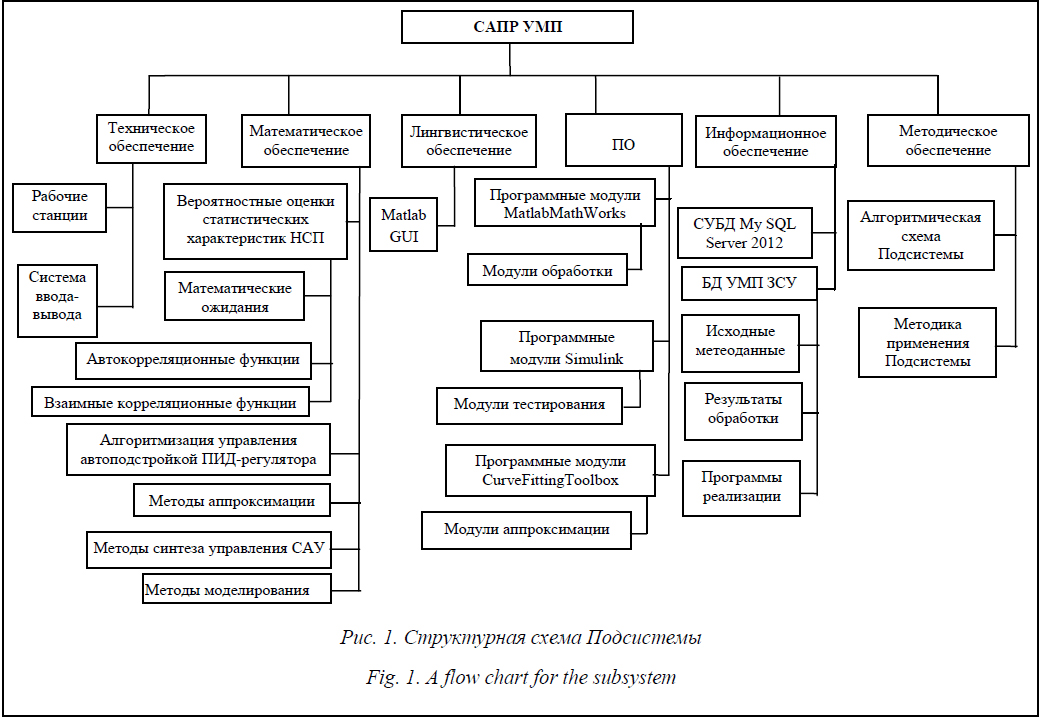
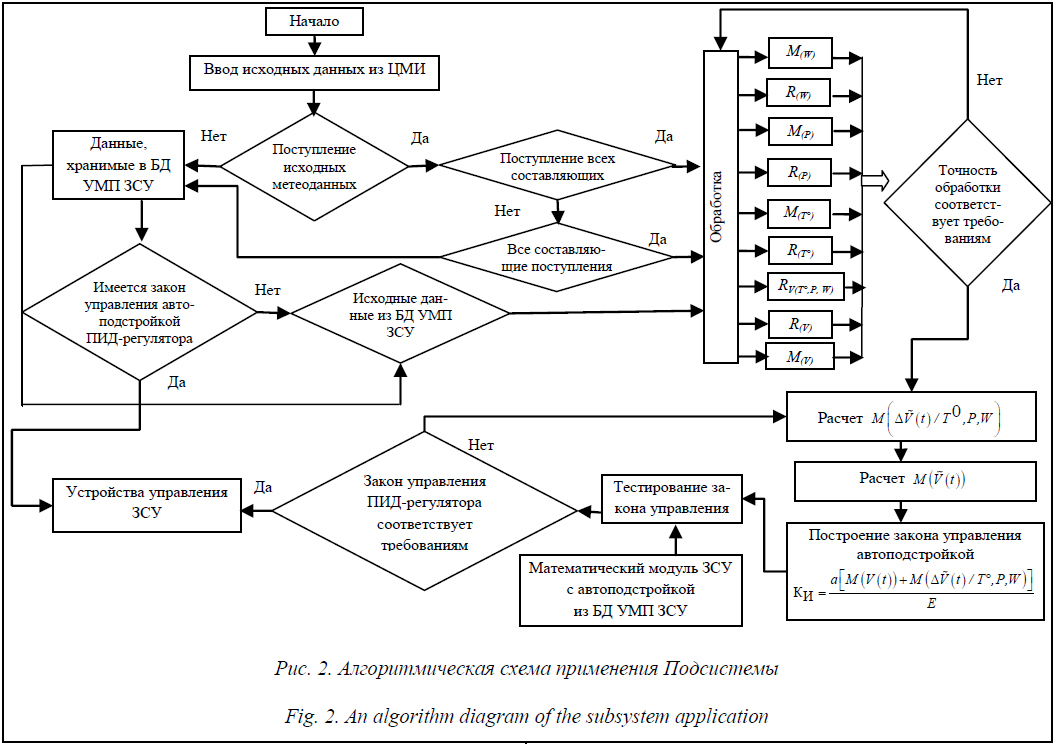
Подсистема САПР устройства метеорологической поддержки (УМП) замкнутой системы управления (ЗСУ) «Природа–Техногеника» (ПТ) (далее – Подсистема) является одной из составляющих САПР этой замкнутой системы и инструментом проектировщика УМП ЗСУ [1]. В работах [1, 2] изложены задачи исследования данной Подсистемы, включающей математическое, программное и информационное обеспечение. В настоящей работе рассматриваются основные задачи и проблемы, возникающие в процессе разработки компонентов Подсистемы. Решение этой задачи позволяет повысить эффективность проектирования ЗСУ средствами самой Подсистемы, сформировать проектную документацию на этапах эскизного проектирования и испытаний ЗСУ ПТ. Построение Подсистемы как инструмента проектировщика осуществляется из компонентов обеспечения в соответствии со стандартом [1]. · Техническое обеспечение Подсистемы – это совокупность взаимосвязанных и взаимодействующих аппаратных средств ЭВМ, на основе которых обеспечивается непрерывное поступление метеорологических данных в режиме реального времени. Для этого необходимы компьютерные системы (рабочие станции, сетевые системы) и система ввода-вывода. Рабочие станции предназначены для построения БД УМП ЗСУ, наблюдения, получения, обработки и передачи метеорологических данных в ЗСУ [1, 3, 4]. Следует выбрать компьютерные системы в соответствии с требованием установки SQL Server 2012 и Matlab R2011b. В данном случае это системы ввода-вывода – микропроцессорные контроллеры, предназначенные для передачи метеорологических данных и закона управления автоподстройкой ПИД-регулятора в ЗСУ. В работе [2] представлены разные типы микропроцессорных контроллеров и важнейшие критерии выбора их показателей. · Математическое обеспечение Подсистемы предназначено для учета возмущения от метеорологических данных и формирования входных сигналов для автоподстройки ПИД-регулятора в ЗСУ в режиме реального времени [2]. Основными алгоритмами обработки метеорологических данных являются математические ожидания, автокорреляционные и взаимные корреляционные функции. Алгоритмы обработки на основе сглаживания приводятся далее в виде оценок нестационарных случайных процессов (НСП) [5, 6]. Алгоритмизация формирования входных сигналов для автоподстройки ПИД-регулятора в ЗСУ в режиме реального времени служит для формирования законов управления автоподстройкой ПИД-регулятора. Перечисленные компоненты математического обеспечения, применяемые в процессе разработки Подсистемы, описаны в работе [2]. · Лингвистическое обеспечение Подсистемы позволяет проектировщику-пользователю общаться с БД УМП ЗСУ и подсистемой модулей обработки и модулей автоподстройки регулятора. Для построения интерфейса Подсистемы можно выбрать среду MatlabGUI. Вопросы построения лингвистического обеспечения Подсистемы рассмотрены в [1]. · Программное обеспечение Подсистемы – это совокупность программных средств и соответствующих программных документов [1]. В Подсистеме используется среда Matlab. Для создания ПО необходимо разработать следующие компоненты: – БД УМП, предназначенную для хранения, обновления и передачи метеорологических данных в ЗСУ ПТ [1]; – блок модулей обработки, предназначенный для определения характеристик потока переноса загрязняющих веществ (ЗВ) с учетом влияния метеорологических данных; для решения этой задачи в этом блоке реализуются алгоритмы обработки, основные алгоритмы для обработки метеорологических данных изложены в работе [2]; исходными данными для этого блока является метеорологическая информация, которая была сохранена в БД УМП ЗСУ, или новая метеорологическая информация, полученная в процессе работы с центром метеорологической информации (ЦМИ) [1]; данные о ее значениях являются входными для блока модулей автоподстройки регулятора; – блок модулей автоподстройки, реализующий законы управления автоподстройкой ПИД-регулятора в ЗСУ; задачами блока являются формирование законов управления автоподстройкой ПИД-регулятора с усреднением по времени (полдень–полночь, сутки, неделя, месяцы, годы), передача коэффициентов автоподстройкой ПИД-регулятора в ЗСУ; результатом работы програм- много модуля автоподстройки регулятора обеспечивается управление ПИД-регулятором на основе метеорологических данных с целью обеспечения устойчивости и качества ЗСУ как системы автоматического управления (САУ) [7]. · Информационное обеспечение Подсистемы – это совокупность БД, СУБД, необходимых для автоматизации ее проектирования. Основными составляющими БД УМП ЗСУ являются следующие компоненты: – файлы исходных метеорологических данных для их сохранения после получения из ЦМИ (в данной работе сохраненные исходные метеорологические данные получены из ЦМИ города Ханоя (Вьетнам) для микрорайона (промзоны) SocSon Шок Шон (с долготой 106°03' и широтой 20°39')) [8]; – файлы результатов обработки, предназначенные для сохранения результатов обработки метеорологических данных в режиме реального времени; для этого в файлах БД должно быть создано множество таблиц (несколько таблиц в файлах БД с результатами обработки подробно рассмотрены в работе [1]); – файлы законов управления ПИД-регулятором ЗСУ применяются для сохранения законов управления автоподстройкой ПИД-регулятора. Элементы БД УМП ЗСУ формируются в соответствии с задачами Подсистемы. В работе [1] подробно рассмотрены основные задачи и способы, этапы, требования к построению БД УМП ЗСУ. · Методическое обеспечение Подсистемы сводится к разработке алгоритмической схемы ее применения. Для практического применения Подсистемы необходимо разработать алгоритмическую схему работы проектировщика-пользователя Подсистемы как методику применения (инструкцию пользователя). Поэтому в дальнейшем в работе рассматриваются задачи разработки методики применения Подсистемы. Для применения Подсистемы потребуется запуск среды Matlab R2011b, SQL Server 2012. Это делает Подсистему открытой. После запуска Подсистемы происходит включение программных модулей в соответствии с разработанным алгоритмом. Начальным этапом применения Подсистемы для обеспечения обработки и передачи метеорологических данных в ЗСУ является проверка поступления исходных метеорологических данных из ЦМИ. Поскольку метеорологические данные могут не поступать из ЦМИ автоматически, необходимо предусмотреть использование данных, сохраненных в БД УМП ЗСУ. При этом пользователю предлагается выбрать из следующих нужный модуль: – модуль «вставка» для заполнения таблиц в БД УМП ЗСУ из любых типов файлов после получения исходных метеорологических данных из ЦМИ; – модуль «формирование» для формирования метеорологических данных в i-й таблице или в нескольких таблицах; – модуль «создание» для создания новых таблиц или столбцов; – модуль «удаление» для удаления строк из таблиц; – модуль «обновление» для обновления метеорологических данных в таблице. После проверки поступления исходных данных пользователь обращается к блоку «Обработка». При этом предлагается выбор из следующих модулей: – модуль «соединение», служащий для подключения к БД УМП ЗСУ; – модуль «вычисление», предназначенный для расчетов математических ожиданий, автокорреляционных функций, взаимных корреляционных функций и распределения метеорологических параметров по времени (полдень–полночь, сутки, недели, месяцы, сезоны, годы), а также скорости потока переноса ЗВ с учетом колебаний по времени; – модуль «прорисовка», применяемый для прорисовки графиков, рисунков; – модуль «оценка», применяемый для оценки точности обработки метеорологических данных как НСП. После проверки результатов обработки пользователь обращается к блоку «Программатор». В нем осуществляется ввод закона управления автоподстройкой в контроллер ПИД-регулятора. Основные модули в блоке: – «нормирование» для нормирования величин; – «расчет» для программы закона управления автоподстройкой ПИД-регулятора с усреднением по времени; – «передача» для передачи коэффициентов автоподстройки ПИД-регулятора. Результаты, полученные в модулях ввода исходных данных, «обработка» и «программатор», сохраняются в БД УМП ЗСУ как проектная документация.
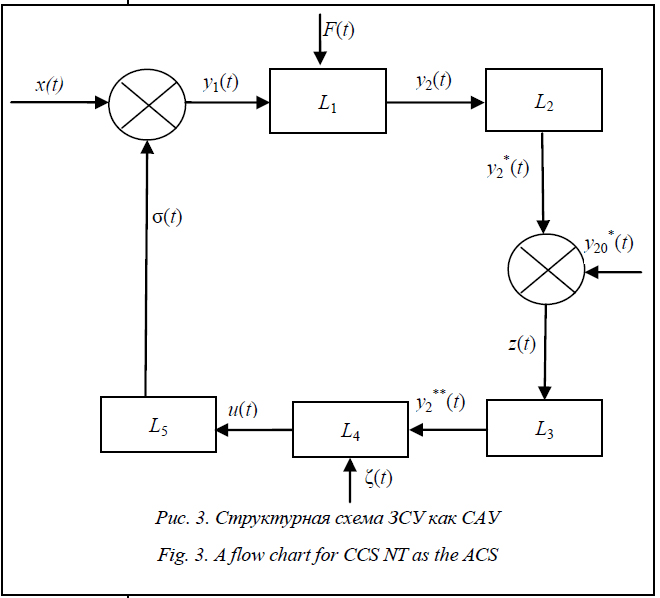
Для выполнения проектных процедур необходимо осуществлять тестирование Подсистемы средствами подсистемы САПР УМП, которое сводится к проверке ее работы совместно с подсистемами «Моделирование», «Обработка», «Программатор» [2, 9, 10]. В данной статье основное внимание уделяется проверке Подсистемы с подсистемой «Моделирование». ЗСУ на рисунке 3 представлена как система автоматизированного управления (САУ). На структурной схеме обозначены операторы и сигналы: L1 – перенос ЗВ от источника ЗВ до точки их измерения; L2 – измерительное устройство (датчик); L3 – устройство преобразования данных измерения; L4 – устройство управления (регулятор); L5 – агрегат отчистки совместно с исполнительным устройством; x(t) – возмущающее воздействие (компенсируемая составляющая топливных газов); F(t) – параметрическое возмущающее воздействие (метеорологические возмущающие воздействия); ζ(t) – сигнал управления автоподстройкой; y1 – рассогласование; y2 – измеряемая величина концентрации ЗВ; y2*– результат измерения параметров; y20*– допустимая величина концентрации ЗВ (y2*); z – величина отклонения; y2**– преобразованный сигнал; u – сигнал управления; σ – сигнал компенсации возмущения.
x(t) – возмущающее воздействие (компенсируемая составляющая) топливных газов, поступающих на вход САУ (рис. 3); F(t) – метеорологические возмущения – V, T°, P, W, которые приводят к изменению транспортного запаздывания распространения потока ЗВ. В структурной схеме ЗСУ регулятор представлен оператором L4, который в результате синтеза закона регулирования [2] имеет вид: L4(p) = КП + + КД×p + КИ ×1/p, где Особенностью такой САУ является то, что объект управления представляет собой распределенную систему, математическая модель которой после приведения ее к форме «вход-выход» (оператор L1 на рис. 3) имеет вид С другой стороны, величина τ определяется скоростью переноса потока ЗВ
где На рисунке 4 показано возмущающее воздействие от метеорологического влияния на ЗСУ – F(t). На рисунке 5 видим на примере ТЭЦ изменение мощности и, соответственно, возмущающего воздействия x(t).
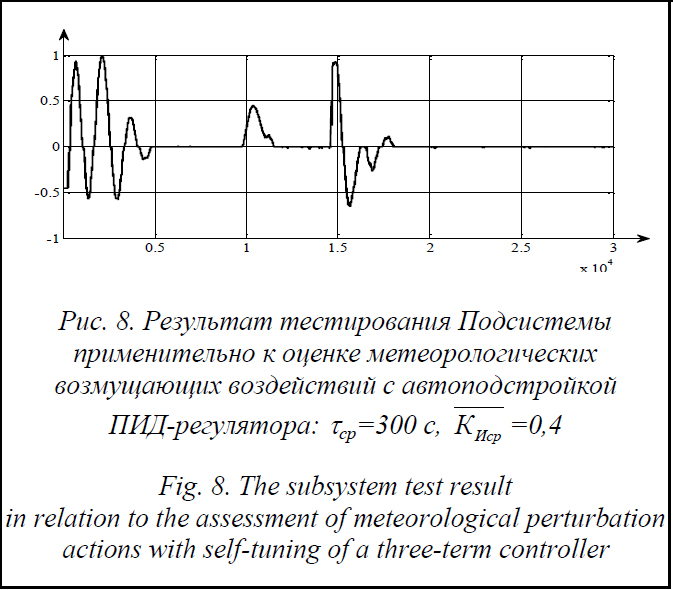
Очевидно, что воздействие метеорологических возмущений без автоподстройки ПИД-регулятора в ЗСУ ПТ приводит к потере ее устойчивости. На рисунке 8 приведен результат тестирования Подсистемы применительно к оценке метеорологических возмущающих воздействий с автоподстройкой ПИД-регулятора. Результаты тестирования Подсистемы подтверждают ее работоспособность при построении средств компенсации метеорологических возмущений. Автоподстройка ПИД-регулятора в ЗСУ необходима для обеспечения компенсации метеорологических возмущений по критериям устойчивости и качеству ЗСУ ПТ как САУ. Таким образом, в статье предложены результаты разработки Подсистемы, в том числе структурная схема, методика применения Подсистемы и результаты тестирования Подсистемы при испытанных УМП в составе ЗСУ. Итоги тестирования подтвердили, что применение разработанной подсистемы САПР является эффективным инструментом проектировщика ЗСУ в части УМП. Литература 1. Сольницев Р.И., До Суан Чо. Построение баз данных метеорологической информации в замкнутой системе управления «Природа–Техногеника» // Программные продукты и системы. 2013. № 1. С. 125–129. 2. Сольницев Р.И., До Суан Чо. Алгоритмизация обработки и передачи метеорологических данных в замкнутой системе управления «Природа–Техногеника» // Информационно-управляющие системы. 2013. № 3. С. 30–35. 3. Карвил Б. Программирование баз данных SQL, типичные ошибки и их устранение. М.: Рид групп, 2012. 336 с. 4. Маркин А.В. Построение запросов и программирование на SQL: учеб. пособие. Рязань: Изд-во РГРТУ, 2008. 312 с. 5. Пугачев В.С. Введение в теорию вероятностей. М.: Наука–Физматлит, 1968. 368 с. 6. Лившиц Н.А., Пугачев В.С. Вероятностный анализ систем автоматического управления. М.: Сов. радио, 1963. 438 с. 7. Коршунов Г.И., Тисенко В.Н. Управление процессами и принятие решений. СПб: Изд-во СПбГПУ, 2010. 231 с. 8. National Hydro-meteorological Service National Center for Hydro-meteorological Forecasting (NCHMF). URL: http:// www.thoitietvietnam.gov.vn/web/en-US/62/19/58/map/Default. aspx (дата обращения: 03.04.2015). 9. Тревгода М.А. Информационные технологии в проектировании систем управления «Природа–Техногеника» // XII Междунар. конф. по мягким вычислениям и измерениям (SCM-2009): матер. СПб: Изд-во СПбГЭТУ «ЛЭТИ», 2009. С. 142–145. 10. Тревгода М.А. Автоматизация проектирования системы управления выбросами загрязняющих веществ // Системный анализ в проектировании и управлении: тр. XII междунар. науч.-практ. конф. Спб: Изд-во СПб политех. ун-та, 2008. С. 255–257. |
 КП, КД, КИ – коэффициенты полученного ПИД-регулятора.
КП, КД, КИ – коэффициенты полученного ПИД-регулятора. где τ – запаздывание при переносе ЗВ от источника до датчика измерительной системы ЗСУ. При этом требуемые характеристики процессов регулирования достигаются при соотношении КИ×t = a @ 0,8¸1,2 [2].
где τ – запаздывание при переносе ЗВ от источника до датчика измерительной системы ЗСУ. При этом требуемые характеристики процессов регулирования достигаются при соотношении КИ×t = a @ 0,8¸1,2 [2]. и является функцией τ =F(V, T0, P, W, N), где величина расстояния от источника ЗВ до датчика N считается заданной.
и является функцией τ =F(V, T0, P, W, N), где величина расстояния от источника ЗВ до датчика N считается заданной.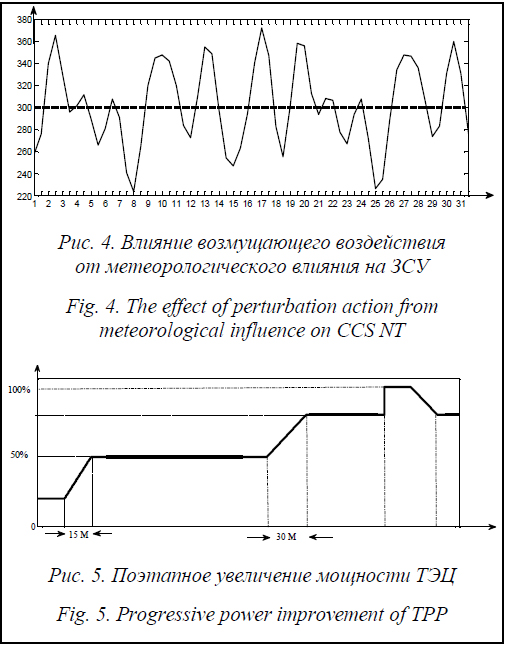

 , ti< t < ti+1, i=1, …, 12 (месяцы) – математическое ожидание усредненной скорости потока по основной составляющей, скорости ветра V(t) с учетом колебаний по месяцам, соответствующее τср;
, ti< t < ti+1, i=1, …, 12 (месяцы) – математическое ожидание усредненной скорости потока по основной составляющей, скорости ветра V(t) с учетом колебаний по месяцам, соответствующее τср;  – условное математическое ожидание дополнения к усредненной скорости потока, соответствующее Δτ – дополнению к τср от влияния остальных метеорологических составляющих T0, P, W, при этом t меняется в диапазоне ti
– условное математическое ожидание дополнения к усредненной скорости потока, соответствующее Δτ – дополнению к τср от влияния остальных метеорологических составляющих T0, P, W, при этом t меняется в диапазоне ti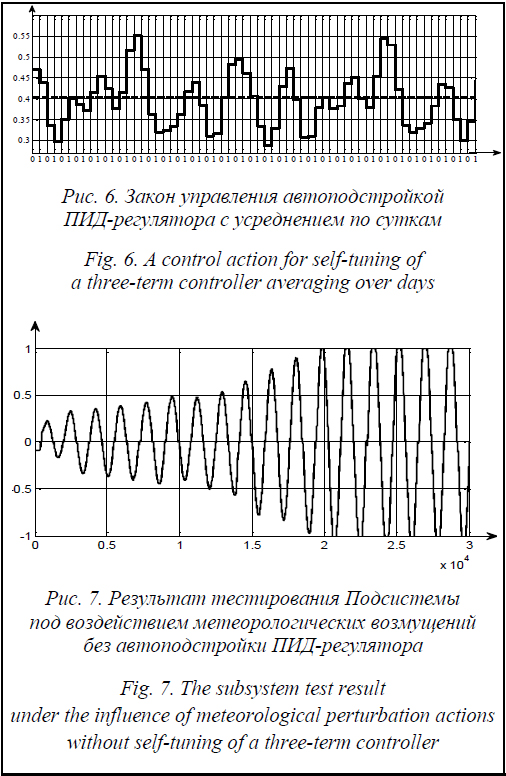
| Постоянный адрес статьи: http://swsys.ru/index.php?id=4053&page=article |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
| Статья опубликована в выпуске журнала № 3 за 2015 год. [ на стр. 204-209 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Построение баз данных метеорологической информации в замкнутой системе управления «Природа–Техногеника»
- Библиотека компонентов внутрисхемного тестирования смешанных интегральных схем
- Программная реализация адаптивной компонентной автоматизированной обучающей системы
- Комплекс программ оптимизации компоновки объектов химических производств
- Генетический алгоритм автоматизированного проектирования подготовительных переходов ковки
Назад, к списку статей