Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Стенд эргономической отработки пилотируемого транспортного корабля как средство проектирования и отработки интерфейсов экипажа
Аннотация:В статье представлены основные технические и программные решения для стенда эргономической отработки пилотируемого транспортного корабля нового поколения, предназначенного для эргономического проектирования и экспериментальной отработки интерфейсов экипажа с кораблем: варианты дисплейных форматов для информационного обеспечения экипажа, новая ручка управления ориентацией и движением. Инновационная составляющая стенда заключается в возможности итеративного создания и экспериментальной проверки вариантов информационного обеспечения экипажа, а также отработки эргономических характеристик перспективных органов управления, таких как ручка управления ориентацией и движением с полноразмерного макета рабочих мест экипажа. Все работы проводятся параллельно с проектированием и созданием пилотируемого корабля нового поколения. Приводятся функциональный состав стенда и два основных режима работы по подготовке экспериментальных данных и по их апробации на программно-технических средствах. Рассмотрены особенности конструкции стенда, построенной по модульному принципу, что способствует его легкой сборке и разборке, транспортировке, доработке и модернизации с учетом появляющихся новых требований по результатам отработки. Приведены особенности разработки и применения специализированного ПО, позволяющего выполнять ряд задач по удаленному мониторингу и управлению режимами моделирования с места руководителя, используя в том числе беспроводную голосовую связь. Все компоненты объединены во взаимосвязанную систему, обмен данными осуществляется посредством локальной вычислительной сети. В макете применены общепромышленные изделия, доработанные с учетом специфики использования в составе стенда эргономической отработки.
Abstract:The article considers basic hardware and software solutions for ergonomic testing of new generation spacecraft. It is supposed to create a stand for ergonomic design and pilot testing of crew interfaces: display formats options to inform the crew, a new joystick to control orientation and movement. The article provides a functional composition of the stand and two main operation modes to prepare experimental data and their validation on the basis of software and hardware platforms. These are the ergonomic features of such perspective control devices as orientation and motion control handle on the one hand and various options of information support for the crew using the latest transforming cosmonaut’s console on the other hand that are the most important. All the works are performed along with the development and creation of a unique product. The article describes the main mechanical features of building cosmonauts’ workplace that enable easy assembling and disassembling of the product, its transportation, adaptations and update with regards to emerging requirements and conditions of use. The specialized software provides a number of tasks with remote monitoring and management of new generation spacecraft systems from the workplace of the person in charge using wireless voice communications as well. All the components are unified into a correlated system; data exchange is performed via local computing network. The training hardware includes general purpose industrial objects adapted to the use in the ergonomic stand.
В настоящее время в России создается перспективная пилотируемая транспортная система (ППТС), включающая в себя многоразовый пилотируемый транспортный корабль (ПТК) нового поколения, который не только заменит пилотируемые корабли серии «Союз», но и откроет новые возможности, такие как увеличенная грузоподъемность, многоразовость, полеты к Луне [1, 2]. В отличие от ранее принятого подхода к проектированию автоматического пилотируемого корабля [3, 4], приоритет в котором отдается автоматике, а человек осуществляет функции контроля автоматических режимов и выполнения резервных режимов управления, в процессе проектирования ПТК и его составных частей предлагаются итеративное создание и экспериментальная отработка интерфейса экипажа с ПТК, обеспечивающего космонавту активное участие в контроле и управлении кораблем. Стенд эргономической отработки (СЭО) ПТК, разрабатываемый ракетно-космической корпорацией «Энергия» совместно с Центром тренажеро- строения и подготовки персонала с 2014 г., предназначен для эргономической оценки, экспериментальной отработки вариантов информационного обеспечения экипажа ПТК, новых органов управления (ОУ) и систем отображения информации (СОИ), моделирования деятельности экипажа и процессов управления ПТК в наземных условиях. Объект испытаний – интерфейс экипажа с ПТК, включающий экспериментальные и опытные образцы ОУ и СОИ, а также информационная модель систем ПТК в виде набора дисплейных форматов для контроля и управления кораблем. Программно-аппаратное обеспечение дает возможность подготовки вариантов информационного обеспечения экипажа ПТК с использованием системы разработки информационной модели систем ПТК и экспериментальной отработки интерфейсов экипажа при моделировании вариантов информационного обеспечения ПТК в полноразмерном макете командного отсека (КО) корабля. Система разработки информационных интерфейсов экипажа обеспечивает создание вариантов дисплейных форматов для представления данных о процессах управления, состоянии и работе бортовых систем, а также о внешней обстановке с целью экспериментальной отработки и эргономической оценки ОУ и СОИ: – интерактивное создание и изменение информационных кадров с помощью программного пакета разработки; – создание и пополнение библиотеки графических образов для создания мнемосхем и других элементов информационных кадров; – настройку связей отображаемой информации с моделями систем и параметрами моделируемых процессов; – интерактивную настройку параметров информационных моделей; – отладку информационных интерфейсов экипажа. Система моделирования предназначена для моделирования процессов взаимодействия экипажа с ПТК в автоматических и ручных режимах управления посредством технических и программных средств и обеспечивает – имитационное моделирование работы основных бортовых систем ПТК; – моделирование на рабочих местах экипажа (РМЭ) процессов контроля и управления ПТК; – моделирование внутренней и внешней коммуникации экипажа с использованием имитационной модели бортовой системы связи (между членами экипажа ПТК, с исследователями и операторами – рабочее место исследователя-оператора (РМ-ИО)); – управление с РМ-ИО процессами моделирования управления ПТК экипажем, а также внешними связями стенда, отображение информации и управление стендом на РМ-ИО, регистрацию параметров процессов и характеристик деятельности испытателей ПТК на стенде; – разработку сценариев процессов моделирования, моделей систем ПТК, БД, ПО контроля и анализа; – изменение состава и конфигурации РМЭ в соответствии с задачами испытаний. Структура и состав стенда Стенд эргономической отработки ПТК состоит из следующих составных частей (рис. 1): полноразмерный макет КО (рис. 2), оснащенный действую- щими макетами пульта космонавтов, кресел космонавтов и другим оборудованием, необходимым для отработки режимов управления и контроля систем ПТК; технологическая стойка для размещения вычислительных средств, сетевого оборудования, системы электропитания и модулей устройств сопряжения (УСО); РМ-ИО, предназначенное для управления работой стенда и контроля проводимых космонавтами операций внутри КО; рабочее место разработчика, предназначенное для создания и корректировки интерфейсов экипажа с ПТК.
Интерьер макета КО представлен на рисунке 3. Макеты кресел позволяют отрабатывать деятельность экипажа на двух основных рабочих местах – РМЭ1, РМЭ2. Пульт космонавта установлен на поворотной раме, которая с помощью механизма может принимать два положения: рабочее и транспортное. На раме размещены три цветных жидкокристаллических сенсорных дисплея с накладными рамками для физической имитации кнопок, расположенных по периферии экрана и обеспечивающих выбор форматов, отображаемых в центральной области экрана. Каждый монитор пульта космонавта подключен к соответствующему макету процессорного блока отображения информации, представляющего собой мини-компьютер, обеспечивающий формирование изображения на экране и интерфейс с моделирующей системой. Это обеспечивает три независимых канала управления системами ПТК, ввод команд, мониторинг работы систем и управление отдельными приборами и устройствами с пульта космонавтов.
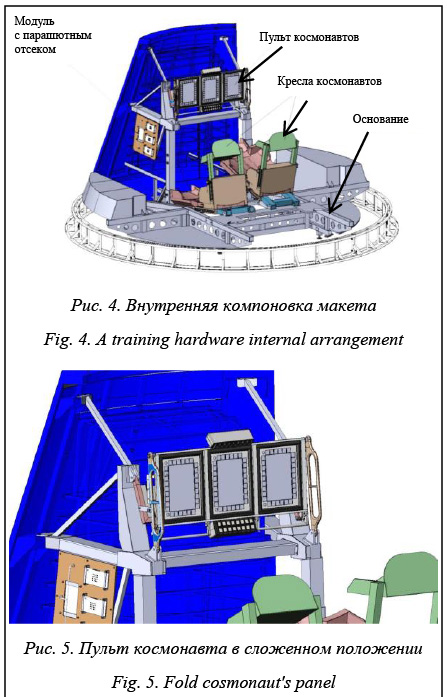
Действующий макет ручки управления движением и ориентацией (РУДО) объединяет в себе функции двух раздельных органов управления – ручки управления движением (РУД) и ручки управления ориентацией (РУО), имеющихся на существующих транспортных кораблях «Союз-ТМА». РУДО обеспечивает на стенде ручное управление двумя членами экипажа с левого РМЭ и при необходимости с правого РМЭ (левой рукой). РУДО через специализированный преобразователь сигналов, как и мини-компьютеры пульта космонавтов, подсоединены к локальной вычислительной сети стенда ПТК. Это позволяет всем составным компонентам системы обмениваться данными в процессе работы и моделирования. Беспроводная технологическая связь обеспечивает имитацию системы связи для внутренних переговоров между двумя членами экипажа и взаимодействия с наземными операторами связи. Комфортные условия работы в командном отсеке обеспечиваются набором вытяжных вентиляторов и светильниками. Контроль (наблюдение) за действиями экипажа с целью оценки их выполнения ведется на РМ-ИО в реальном времени с помощью отдельной IP-камеры. РМ-ИО оснащено монитором большой диагонали, на котором отображаются состояние каждого из сенсорных мониторов пульта космонавтов, вспомогательная информация о ходе отработки интерфейсов и изображение IP-камеры также для отслеживания выполнения и отработки интерфейсов. Помимо наблюдения, исследователь-оператор может вмешиваться в процесс управления и при необходимости вызывать форматы и управлять системами ПТК: выдавать команды управления, работать с информационными кадрами и форматами, изменять конфигурацию форматов на РМЭ. ПО стенда Для работы стенда используются специализированное ПО формирования моделей и форматов, отображаемых на пульте космонавта, на основе коммерческой версии системы Master SCADA; ПО режима захвата экранов пульта космонавтов Lite Manager; ПО технологической связи Team Speak; ПО работы с IP-камерой командного отсека ПТК. Загрузка системного и прикладного ПО осуществляется на следующих компонентах стенда: АРМ разработчика – после включения загружаются ОС Windows и среда разработки информационных интерфейсов экипажа; АРМ исследователя-оператора – после включения загружаются ОС Windows и системное ПО для выполнения операций захвата экранов пульта космонавтов Lite Manager и организации технологической связи Team Speak, ПО работы с IP-камерой командного отсека ПТК, а также прикладное ПО управления работой стенда; мини-компьютеры, обеспечивающие вывод информации на пульт космонавтов, – после включения загружаются ОС Windows, системное ПО организации технологической связи Team Speak и прикладное ПО отображения форматов Master SCADA [5]. Специализированное ПО формирования моделей и форматов, отображаемых на пульте космонавта, представлено программным продуктом Master SCADA – программным пакетом для проектирования систем диспетчерского управления и сбора данных. Основными свойствами являются модульность, масштабируемость и объектный подход к разработке. Система предназначена для сбора, архивирования, отображения данных, а также для управления различными технологическими процессами. Помимо создания так называемого верхнего уровня, система дает возможность программировать контроллеры с открытой архитектурой. Таким образом, Master SCADA позволяет создавать единый комплексный проект автоматизации [6, 7]. Функционал MasterSCADA может быть расширен за счет использования дополнительных мо- дулей. В базовый функционал входят среда раз- работки, внутренний архив данных, сообщений и документов, OPC DA- и OPC HDA-клиенты, редактор мнемосхем, редактор отчетов, модуль трендов и модуль журналов, обработка данных, базовые библиотеки функциональных блоков, формирование расписаний и событий. В опциональный набор входят возможность создания сетевого проекта, резервирование, взаимодействие с БД, отраслевые библиотеки функциональных блоков. Проект разрабатывается в единой интегрированной среде (независимо от модульного состава программы). Основным способом создания структуры проекта является установление связей между элементами проекта (объектами, функциональными блоками и переменными) в дереве объектов. При дублировании и копировании связи могут восстанавливаться. При создании проекта могут использоваться стандартные функциональные блоки (ФБ исполни- тельных механизмов, математические блоки, об- работка сигналов и т.д.) либо самостоятельно разработанные пользователем на языках программирования ST, FBD и C#. Использование MasterSCADA как средства проектирования отработки интерфейсов экипажа обусловлено тем, что применяемое ПО позволяет относительно просто создавать и изменять сцена- рии моделирования. Для разработки модели системы ПТК используется многофункциональный графический редактор, позволяющий строить мнемосхемы различной сложности с помощью как готовых визуальных элементов из библиотеки, так и новых элементов, создаваемых разработчиком. Логика работы любой системы описывается специализированным скриптом, работа которого обеспечивает моделирование числовых параметров и последующее отображение изменения состояния функциональных блоков на мнемосхемах системы. Такое разделение и наличие достаточно простого пользовательского редактора позволяет при необходимости дорабатывать и изменять получаемые визуальные представления дисплейных форматов в процессе отработки различных эргономических характеристик. Режим захвата экранов пульта космонавтов обеспечивает программный продукт Lite Manager Free, который обладает основными функциями и позволяет одновременно управлять несколькими компьютерами (до 30) [8]. Преимущества продукта: управление и просмотр удаленного рабочего стола компьютера Remote Desktop, файловый менеджер для работы с файлами и папками, управление питанием компьютера. LiteManager предоставляет понятный и простой интерфейс для удаленного администрирования. Выбираются необходимый режим работы, управление компьютером, передача файлов, просмотр процессов и т.д., осуществляется подключение к удаленному компьютеру. Компьютеры могут отображаться в виде эскизов, на которых видно их текущее состояние. В режиме управления удаленным рабочим столом можно использовать функции Drag&Drop, системный буфер обмена, переключаться между мониторами удаленного компьютера. После автозагрузки ПО и завершения процесса включения стенда выбираются эскизы в главном окне программы удаленных рабочих столов мини-компьютеров пульта космонавтов и выполняется команда их вывода на общий монитор для наблюдения действия и удаленного управления. ПО Lite Manager может быть настроено на дублирование экранов как в 100 %-ном, так и в уменьшенном или увеличенном масштабе. Специализированное ПО технологической связи Team Speak – программа, предназначенная для голосового общения посредством технологии VoIP [9]. От классического телефона отличается практически неограниченным количеством абонентов, разговаривающих одновременно. ПО состоит из серверной и клиентских частей (серверная часть установлена на АРМ исследователя-оператора, клиентские – на двух мини-компьютерах пульта космонавтов). Для того чтобы пользоваться Team Speak, необходимо знать адрес сервера, на котором установлена серверная часть программы, и пароль, если он требуется для соединения. Для полноценной работы с Team Speak пользователю требуются наушники или колонки и микрофон – в данном случаем используются беспроводные гарнитуры Logitech Wireless Headset Mono H820e. Процесс общения представляет собой конференцию в реальном времени, в которой разговаривающие могут произносить реплики одновременно. Во избежание этого каждый участник может заблокировать лично для себя звук от другого участника. Возможен режим записи всех сообщений в отдельный аудиофайл. Выбор данного ПО обусловлен тем, что оно полностью реализует все требуемые задачи по созданию циркуляров голосовой связи и отображению дублей экранов пульта космонавта, а также по оперативному изменению параметров и настройке приложений для новых задач на РМ-ИО. Конструктивные особенности построения макета КО При проектировании макета ПТК использовались следующие принципы: подобие макета проекту КО по размерам, форме и внутренним объемам, модульность конструкции макета, минимальные весовые характеристики, технологичность сборки и разборки макета [10]. Корпус макета ПТК выполнен из сборно-разборного основания с установленными на нем шестью модулями наружной обшивки. Конструкция основания и наружные обводы корпуса выполнены из алюминиевых тонкостенных прессованных профилей и листового алюминия. На основании макета, кроме ограждающей конструкции, установлены все элементы интерьера: каркасы кресел, кресла, конструкции механизма пульта космонавтов и другие. Они не связаны с конструкцией ограждения, что позволяет в процессе компоновки, монтажа и отработки эргономических характеристик оперативно удалять любой из модулей ограждения, не внося радикальных изменений в конструкцию интерьера КО, оперативно вносить изменения в компоновку интерьера без существенной переделки всей конструкции макета (рис. 4).
Механизм пульта космонавтов в макете КО функционально подобен механизму, созданному в процессе проектно-конструкторской разработки ПТК, и позволяет устанавливать пульт в транспортное и рабочее положение (рис. 5, 6). Это дает возможность эргономической оценки компоновки рабочих мест космонавтов в КО ПТК и своевременного внесения изменений в конструкцию пульта на этапе выпуска рабочей документации. Модульное построение макета КО ПТК позволяет вносить изменения в конструкцию макета на стадиях проектно-конструкторской проработки ПТК по результатам эргономической оценки рабочих мест экипажа. В итоге экспериментальной от- работки интерфейсов экипажа с кораблем вносятся корректировки в проект ПТК. Представленный стенд эргономической отработки ПТК рассматривается в качестве пилотажного средства, обеспечивающего эффективное взаимодействие экипажа с высокоавтоматизированным космическим кораблем на разных уровнях: контроль и управление отдельными системами, выполнение полетных операций, контроль и оперативное изменение полетных задач и программы полета в целом. СЭО ПТК должен обеспечить решение этой за- дачи на базе РКК «Энергия» с использованием но- вых программных, технических, конструктивных и технологических решений. Литература 1. Корабль нового поколения (ПТК НП). URL: http://kosmolenta.com/index.php/new-tech/ptknp (дата обращения: 20.08.2015). 2. Афанасьев И. Перспективный транспортный корабль нового поколения // Новости космонавтики. 2014. № 09. С. 58–61. 3. Голиков Ю.Я. Современные концепции автоматизации и подходы к человеку и технике // Психол. журнал. 2002. Т. 23. № 1. С. 18–30. 4. Кукин О.Н., Серов М.В. О реализации методов инженерно-психологического проектирования пилотируемых космических аппаратов. Человеческий фактор: проблемы психологии и эргономики. 2013. № 4 (67). С. 34–38. 5. Общая информация о MasterSCADA. URL: http://www. masterscada.ru/?additional_section_id=26 (дата обращения: 20.08.2015). 6. Среда пользовательского программирования и автоматизация проектирования в MasterSCADA. URL: http://isup.ru/ articles/2/763/ (дата обращения: 20.08.2015). 7. MasterSCADA – полнофункциональный пакет программ для разработки АСУ ТП. URL: http://www.rlda.ru/MasterSCADA.htm (дата обращения: 20.08.2015). 8. Удаленное управление компьютерами при помощи бесплатной программы LiteManager. URL: http://www.ixbt.com/soft/ litemanager.shtml (дата обращения: 20.08.2015). 9. Установка и настройка TeamSpeak 3. URL: https://cfire. mail.ru/forums/showthread.php?t=132893 (дата обращения: 20.08.2015). 10. Шукшунов В.Е., Циблиев В.В., Потоцкий С.И. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации. М.: Машиностроение, 2005. 384 с. |




| Постоянный адрес статьи: http://swsys.ru/index.php?id=4063&like=1&page=article |
Версия для печати Выпуск в формате PDF (9.58Мб) Скачать обложку в формате PDF (1.29Мб) |
| Статья опубликована в выпуске журнала № 4 за 2015 год. [ на стр. 28-33 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Информационные модели и механизмы процесса коммерциализации результатов инновационной деятельности
- Компьютерная система для разработки цифровых информационных моделей процессов вторичной переработки нефти
- Об информационном обеспечении поддержки принятия решений
- Метод организации информационного и программного обеспечения системы технической подготовки производства для процессов глубокой вытяжки
- Комплекс проблемно-ориентированных программ анализа микрофотоизображений текстуры нанокомпозитов «FRA_VA_T»
Назад, к списку статей