Авторитетность издания

Добавить в закладки
Следующий номер на сайте


О реализации средств машинного обучения в интеллектуальных системах реального времени
Аннотация:В работе дан анализ методов обучения с подкреплением (RL-обучения) в плане их использования в интеллектуальных системах реального времени на примере интеллектуальных систем поддержки принятия решений реального времени. Описана реализация алгоритмов обучения с подкреплением на основе временных (темпоральных) различий и рассмотрены основные преимущества использования гибких алгоритмов, которые могут оказывать значительное влияние на эффективность и производительность интеллектуальных систем реального времени. Гибкие алгоритмы могут иметь решающее значение для интеллектуальных систем поддержки принятия решений реального времени, так как они способны находить приемлемые решения в условиях жестких временных ограничений и улучшать их (вплоть до получения оптимальных) при увеличении предоставляемых ресурсов (особенно временных). Предложен гибкий алгоритм, включающий в себя статистический модуль прогнозирования и мультиагентный модуль RL-обучения. Рассмотрены возможности внедрения разработанного гибкого алгоритма в подсистему прогнозирования интеллектуальных систем реального времени типа интеллектуальных систем поддержки принятия решений реального времени для управления и мониторинга сложного технологического объекта. Описываются подход к реализации перехода от обучения интеллектуальных систем, основанных на знаниях, к обучению средств их разработки (при этом архитектура такой интеллектуальной системы рассматривается как основа обеспечения ее гибкости и обучаемости), а также направления обучения и самообучения интеллектуальных систем, их способность приобретать знания и навыки из различных источников. Дается обоснование применения развиваемой в работе технологии OSTIS для разработки интеллектуальных систем, основанных на знаниях, включая интеллектуальные системы реального времени.
Abstract:The paper analyzes the methods of reinforcement learning in terms of using them in real-time intelligent systems (RT IS) on the example of the real-time intelligent decision support systems (RT IDSS). The authors describe implementation of reinforcement learning algorithms based on temporal differences and consider the main advantages of using flexible (anytime) algorithms that can have a significant impact on RT IS efficiency and productivity. Flexible algorithms can be crucial to RT IDSS, as they are able to find acceptable solutions under tight time constraints and improve them (up to optimal ones) while increasing available resources (especially temporary ones). The proposed flexible algorithm includes a statistical forecasting module and a module of multi-agent reinforcement learning. The paper considers the possibilities of implementation of the developed flexible algorithm into a RT IS forecasting subsystem of RT IDSS type to control and monitor a complex technological object. The paper considers the approach to implementation of a transition from knowledge-based intelligent systems training to training of their development tools. At the same time, the architecture of such intelligent systems is considered as the basis for its flexibility and learning capacity. The paper also examines the areas of intelligent system learning and self-learning, as well as their ability to acquire knowledge and skills from different sources. The authors provide rationalization for the application the developed OSTIS technology to develop knowledge-based intelligent systems, including the RT IS.
| Авторы: Еремеев А.П. (eremeev@appmat.ru) - Национальный исследовательский университет «Московский энергетический институт» (профессор), г. Москва, Россия, доктор технических наук, Кожухов А.А. (saaanchezzz@yandex.ru) - Национальный исследовательский университет «Московский энергетический институт» (аспирант), Москва, Россия, Голенков В.В. (golen@bsuir.by) - Белорусский государственный университет информатики и радиоэлектроники (БГУИР) (профессор), Минск, Беларусь, доктор технических наук, Гулякина Н.А. (guliakina@bsuir.by) - Белорусский государственный университет информатики и радиоэлектроники (БГУИР) (доцент), Минск, Беларусь, кандидат физико-математических наук | |
| Ключевые слова: искусственный интеллект, технология разработки интеллектуальных систем, гибкие алгоритмы, обучение с подкреплением, самообучение, машинное обучение, поддержка принятия решений, реальное время, интеллектуальная система, программное средство |
|
| Keywords: artificial intelligence, development technology of intelligent systems, anytime algorithms, time, reinforcem ent learnin, self-learning, machine learning, decision support, real time, intellectual system, software |
|
| Количество просмотров: 11239 |
Статья в формате PDF Выпуск в формате PDF (19.46Мб) |
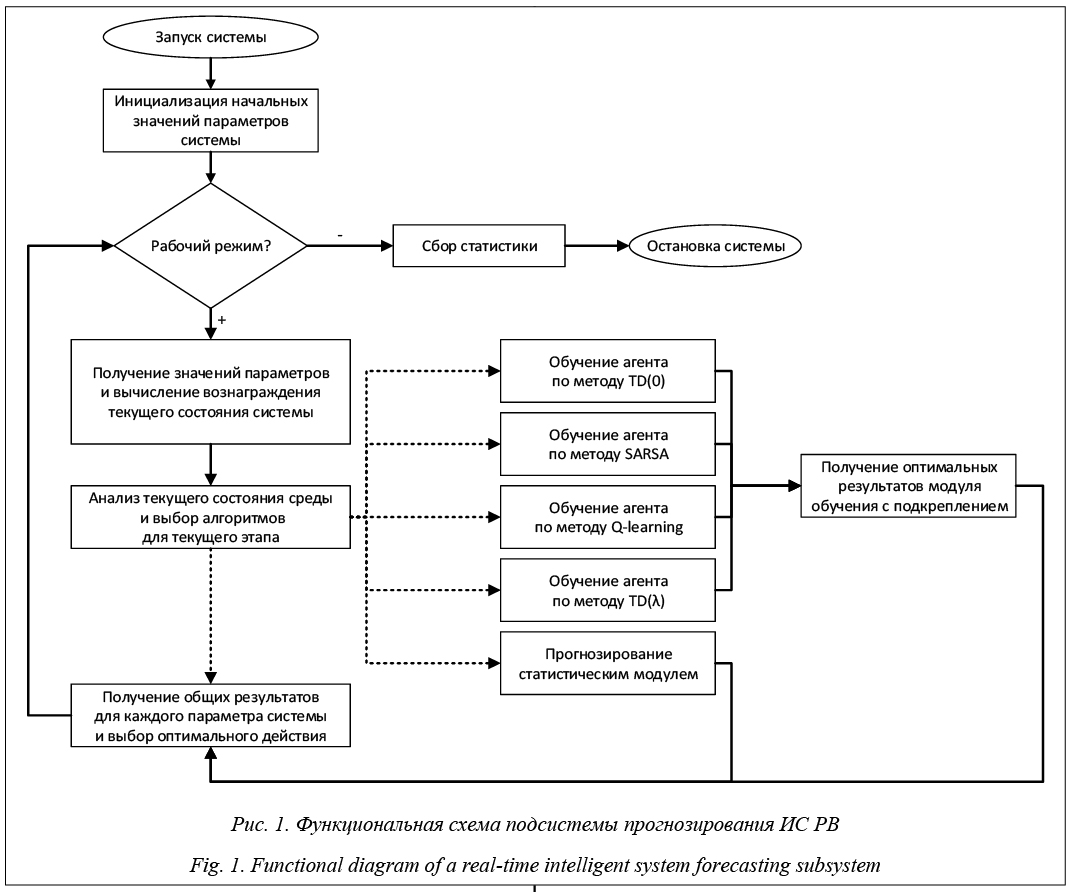
Для реализации Стратегии научно-технологического развития Российской Федерации в плане перехода к передовым цифровым, интеллектуальным производственным технологиям, роботизированным системам, новым материалам и способам конструирования, создания систем обработки больших объемов данных, машинного обучения и искусственного интеллекта, а также аналогичной стратегии Республики Беларусь, актуальной является задача разработки эффективных методов машинного обучения в составе современных интеллектуальных систем (ИС), особенно ИС реального времени (РВ), функционирующих при достаточно жестких временных ограничениях и неопределенности (зашумленности) поступающей информации, а также включения средств машинного обучения в инструментальные средства разработки ИС и ИС РВ. Интеграция методов обучения с подкреплением и гибких алгоритмов в ИС РВ Применительно к ИС и особенно к ИС РВ активно используются методы обучения с подкрепле- нием (reinforcement learning, RL) [1, 2], основанные на использовании довольно большого количества информации для обучения в произвольной окружающей среде. К основным достоинствам RL-обучения в плане использования в ИС РВ относятся: - использование простой обратной связи на основе скалярных платежей; - поддержка режима оперативного реагирования при необходимости быстрой адаптации агента к изменениям внешней среды; - интерактивность и возможность изменения (пополнения) анализируемых данных; - действенность в недетерминированных средах; - эффективность в сочетании с темпоральными моделями для задач нахождения последовательных решений; - открытость к модификации и сравнительная простота включения в ИС различного назначения (планирования, управления, обучения и т.д.). Как показано в [2], одним из наиболее эффективных в плане использования в ИС РВ типа ИС поддержки принятия решений РВ (ИСППР РВ) от- носительно интегрированного критерия «качество обучения – временные затраты» является RL-обучение на основе темпоральных различий (temporal-difference, TD), когда процесс обучения основывается непосредственно на получаемом опыте без предварительных знаний о модели поведения окружающей среды. Отмечено, что ключевой особенностью TD-алгоритмов является обучение на основе различий во временных последовательных предсказаниях. TD-методы, предназначенные для многомерных временных рядов, способны обновлять расчетные оценки, не дожидаясь окончательного результата, то есть являются самонастраиваемыми (и в определенном смысле самообучаемыми). Последнее свойство весьма важно для динамических ИС семиотического типа, способных адаптироваться и подстраиваться к изменениям в управляемом объекте и окружающей среде [3, 4]. С использованием TD-методов в ИС РВ можно решать задачи как предсказания значений некоторых переменных в течение нескольких временных шагов, так и управления, основанные на RL-обучении агента влиянию на окружающую среду. Для возможности обучения и адаптации к изменениям внешней среды агент должен обладать памятью для хранения предыстории. Использование мультиагентного подхода, базирующегося на применении групп автономных взаимодействующих между собой субъектов (агентов), имеющих общую интеграционную среду и способных получать, хранить, обрабатывать и передавать информацию в интересах решения как собственных, так и корпоративных (общих для группы агентов) задач анализа и синтеза информации, является перспективным подходом для динамических ИС РВ. Мультиагентные системы характеризуются возможностью параллельных вычислений, обмена опытом между агентами, отказоустойчивостью, масштабируемостью и т.д. [5]. При разработке современных ИС РВ, а также инструментальных средств создания таких систем особое внимание необходимо уделить средствам прогнозирования развития ситуации на объекте и последствиям принимаемых решений, экспертным методам и средствам обучения, оптимальному использованию доступных ресурсов системы и возможности работы в среде с достаточно жесткими ограничениями по времени. Для решения поставленных задач была разработана инструментальная программная среда с использованием параллельных алгоритмов для статистических методов и методов RL-обучения и спроектирована модель гибкого (anytime) алгоритма, который способен находить приемлемые решения в условиях жестких временных ограничений и доступных ресурсов [2, 6], что необходимо для ИС РВ и, в частности, ИСППР РВ, предназначенных для помощи оперативному персоналу при управлении сложными технологическими объектами типа энергообъектов (энергоблоков) в пределах допустимых отклоне- ний, с учетом текущего состояния окружающей среды и использования параллельных и фоновых вычислений. Разработанный алгоритм способен улучшать свои решения (вплоть до нахождения оптимального) при увеличении временных интервалов. Использование гибких алгоритмов открывает возможности оперативной модификации и адаптации ИС РВ к различным изменениям на объекте и во внешней среде, расширяет область применения и способность увеличивать производительность таких систем в целом. Гибкие алгоритмы все чаще используются в ряде практических областей, включая планирование и поиск решения, глубокие сети доверия, оценку диаграмм влияния, обработку запросов к БД, контроль и сбор информации и т.д. Данный подход может иметь решающее значение для ИС РВ при наличии большого количества датчиков, способных к анализу, и большой вычислительной сложности алгоритмов планирования для нахождения приемлемых в случае ограниченного времени или оптимальных при наличии достаточных временных ресурсов решений и может значительно повысить производительность и расширить область применения ИС РВ. На примере ИСППР РВ для ИС РВ была разработана подсистема прогнозирования на основе интеграции методов прогнозирования с использованием статистических и экспертных методов, алгоритмов TD-методов обучения и гибкого алгоритма поиска решения, способная получать результаты в условиях достаточно жестких временных ограничений [2]. В идеальном варианте работы алгоритма при наличии достаточного времени и ресурсов будут выполнены параллельное прогнозирование комбинированным статистическим методом, обучение на основе RL-обучения различными методами, анализ полученных результатов и нахождение оптимального решения. В условиях жестких временных ограничений применяется технология разбиения на этапы [7], согласно которой алгоритм выбирает наиболее перспективный относительно точности прогноза и времени выполнения путь и рассчитывает результат только наиболее адекватными в текущий момент методами. При этом все остальные этапы могут исполняться в фоновом режиме с целью включения их в анализ на последующих шагах.
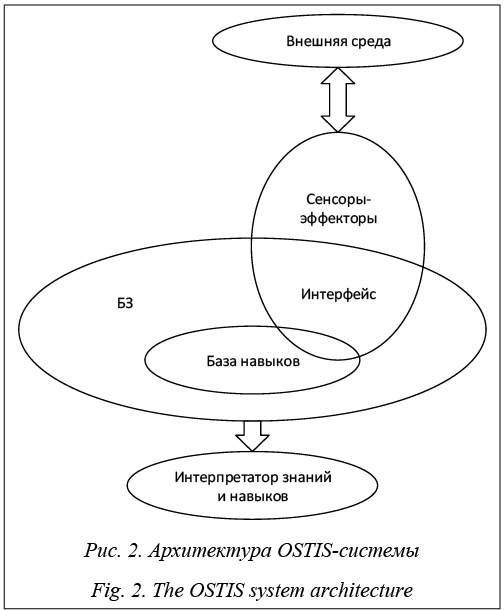
Интеграция методов позволила реализовать следующие преимущества: - гибкость и адаптируемость: в зависимости от состояния среды могут использоваться различные параллельные алгоритмы обучения и прогнозирования и их комбинации; - возможность расчета предполагаемого действия независимо от доступных времени и ресурсов памяти; - возможность практически немедленной выдачи решения по запросу и продолжение расчетов в фоновом режиме; - выявление наиболее эффективных алгоритмов для текущей среды и нахождение наилучших (локально или глобально оптимальных) решений. От обучения ИС к обучению средств их разработки на основе технологии OSTIS Обучаемость ИС создает необходимые условия для обеспечения быстрых темпов их эволюции, для расширения множества решаемых ими задач и для повышения качества решения, для быстрой адаптации ИС к изменениям внешней среды и условий эксплуатации [8–12]. Уровень обучаемости ИС определяется уровнем развития ее средств самообучения и прежде всего уровнем ее рефлексивности, способности к самоанализу. Важнейшим критерием качества предлагаемых технологий разработки ИС и ИС РВ является то, какой уровень обучаемости разрабатываемых ИС они обеспечивают. ИС, разрабатываемые на основе технологии OSTIS (которые будем называть OSTIS-системами), обладают высоким уровнем гибкости и обучаемости [8]. Гибкость OSTIS-систем определяется следующими факторами: - смысловой характер внутреннего представления знаний; - развитые средства систематизации хранимых знаний, структуризации базы знаний (БЗ); - развитый уровень ассоциативной организации памяти; - агентно-ориентированная организация обработки знаний, которая управляется самой обрабатываемой БЗ. Обучаемость OSTIS-систем определяется их способностью обнаруживать противоречия (ошиб- ки), информационные дыры (пропуски) и информа- ционный мусор, которые появляются в текущем состоянии БЗ как в результате приобретения знаний и навыков извне, так и в процессе решения различных задач. При этом во втором случае каждое обнаруженное противоречие, информационная дыра или информационный мусор явно связываются с породившим их информационным процессом для уточнения причины их возникновения.
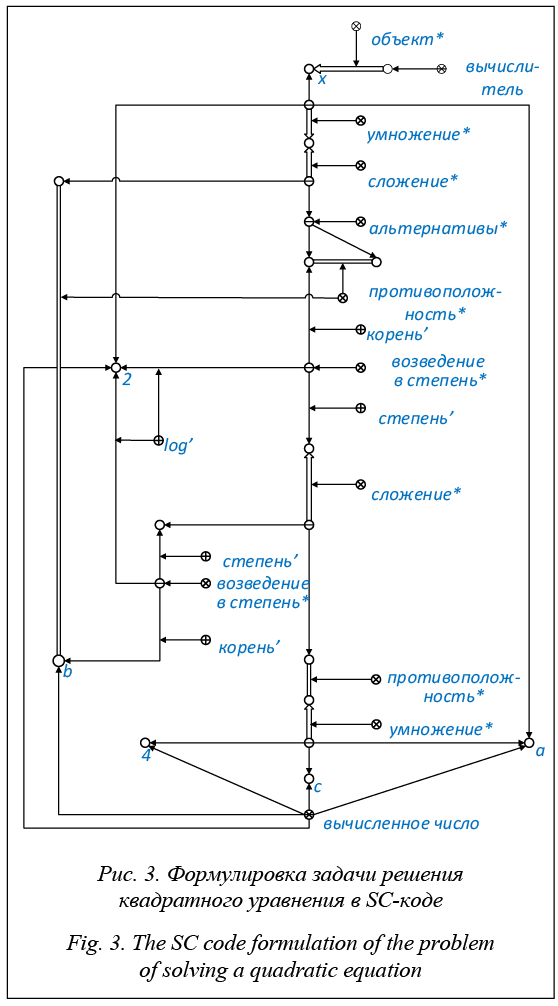
Под самообучением ИС понимается автоматизация различных процессов, направленных на обучение ИС и осуществляемых самой ИС. К таким автоматизируемым процессам относятся следующие: - перманентный анализ качества БЗ и интегрированного решателя задач обучаемой ИС, результатом которого являются, например, выявление различного рода ошибок (противоречий), информационного мусора, информационных дыр (недостающих знаний и навыков), оценка достоверности (правдоподобия) новых приобретаемых (в том числе вводимых) знаний и навыков, а также формирование спецификации этих знаний и на- выков (кто автор, момент появления в системе, тип и т.д.); - автоматизируемые виды совершенствования текущего состояния БЗ и интегрированного решателя задач, автоматическое исправление неко- торых ошибок, ликвидация информационного мусора, спецификация информационных дыр, си- стематизация приобретенных знаний и навыков, извлечение неявно представленных знаний из заданных (индуктивный вывод, самообучение по прецедентам и на основе аналогий и т.д.); - координация деятельности учителей-разработчиков (экспертов, ЛПР – лиц, принимающих решения) ИС, которые становятся самостоятельными агентами (субъектами) разработки ИС, управляемыми БЗ этой системы. Отметим, что разработка ИС, обладающей развитыми навыками самообучения, принципиально отличается от разработки ИС, не обладающей такими возможностями. Это обусловлено тем, что самообучаемая ИС сама становится одним из субъектов собственного обучения, то есть одним из своих учителей. И это является существенным фактором повышения эффективности обучения, поскольку никто лучше самой обучаемой ИС не знает о ее внутреннем состоянии (состоянии БЗ, интегрированного решателя и других компонентов). Методика обучения ИС во многом определяется тем, какими средствами самообучения обладает обучаемая ИС. Направления самообучения ИС типа OSTIS-систем: - приобретение новых знаний из разных источников; - извлечение неявных знаний из приобретенных знаний; - обнаружение закономерностей; - структуризация БЗ; - поддержание целостности БЗ (непротиворечивости, полноты, отсутствие «мусора» и т.д.); - повышение эффективности решения задач на основе анализа собственного функционирования. В основе обучаемости ИС лежат способность к рефлексии, то есть способность анализировать и оценивать собственное качество и качество своей деятельности, а также способность оперативно (что особенно важно для ИС РВ типа ИСППР РВ) усваивать новые знания и навыки и совершенствовать уже приобретенные. Так, например, обучаемость искусственных нейронных сетей определяется наличием способа автоматической корректировки параметров искусственной нейронной сети на основе результатов ее тестирования, направленной на построение оптимальной структуры связей, настройку параметров связей (метод стохастического градиента, метод обратного распространения ошибки). Таким образом, обучаемость ИС обеспечивается: - систематизацией внутреннего представления знаний и навыков (все накапливаемые знания и навыки должны быть приведены в стройную систему); - достаточно простой моделью интеграции (погружения) новых знаний и навыков в состав БЗ; - неограниченными возможностями представлять в БЗ всю необходимую для самоанализа информацию о себе (содержащую знак собственного «Я», полную документацию, описание своих связей с другими сущностями и в том числе связей собственной точки зрения с точками зрения других субъектов); - способностью к рефлексии и достаточно простой моделью анализа качества текущего состояния БЗ (качества структуры БЗ, полноты, наличия и локализации обнаруженных противоречий и ошибок); - уровнем развития средств обнаружения и устранения нештатных (в том числе ошибочных) ситуаций в процессе функционирования ИС; - уровнем развития средств повышения качества текущего состояния БЗ (совершенствования системы накапливаемых знаний и навыков). Гибкость (адаптируемость, модифицируемость) ИС является основой ее обучаемости (самообучаемости) и определяется трудоемкостью внесения различных изменений в ИС, осуществляемых на различных уровнях ИС в ходе ее обучения. Гибкость OSTIS-систем обеспечивается предложенными в технологии OSTIS базовыми принципами: кодирования информации в памяти ИС на основе SC-кода (Semantic Computer Code); организации памяти ИС (SC-памяти), обеспечивающей хранение и обработку текстов SC-кода (SC-текстов); обработки информации в SC-памяти ИС. Отметим, что важным достоинством смыслового представления информации на основе SC-кода является то, что в нем явно и четко задаются связи между описываемыми сущностями в виде связей между знаками этих сущностей, а также указывается семантический тип каждой такой связи. Любую знаковую конструкцию можно представить как множество знаков описываемых сущностей и множество знаков связей, связывающих эти описываемые сущности с другими сущностями. При этом на описываемые сущности и на связи между ними не накладывается никаких ограничений. Знаковая конструкция, являющаяся смысловым представлением информации, в общем случае не может быть линейной, поскольку каждая описываемая сущность, являющаяся денотатом соответствующего знака, может иметь множество связей с другими сущностями, описываемыми в этой же знаковой конструкции. Таким образом, смысловое представление информации есть сетевая (графовая) структура в виде семантической сети (СС) или совокупности СС [4], что дает возможность в полной мере использовать теорию графов для исследований и построения алгоритмов обработки СС. Память OSTIS-системы (SC-память) представляет собой нелинейную (графовую) ассоциативную структурно перестраиваемую (графодинамическую) память, в которой обработка информации сводится к изменению не только состояния элементов памяти, но и конфигурации связей между ними. С формальной точки зрения SC-память является динамическим SC-текстом, в котором могут проис- ходить следующие события: удаление SC-узла вместе с удалением всех инцидентных ему SC-связок (знаков различных связей); удаление SC-связки вместе с удалением всех SC-связей, компонентом которых она является; замена типа элемента SC-текста (например, SC-узел может быть преобразован в SC-коннектор); добавление нового элемента SC-текста с указанием связи нового генерируемого в памяти SC-элемента с каким-либо уже присутствующим (хранимым) в памяти SC-элементом. В SC-памяти обеспечивается возможность хранения и обработки любых внешних информационных конструкций (терминов, иероглифов, текстов, изображений, видеоинформации, аудиоинформации), представленных в электронной форме в виде соответствующих файлов. Через такие файлы осуществляется, в частности, обмен информацией между OSTIS-системой и внешними по отношению к ней субъектами (пользователями, другими OSTIS-системами). Особое значение для обеспечения гибкости OSTIS-системы имеет развитая форма ассоциативного доступа к любым видам знаний и навыков, хранимых в памяти системы, благодаря развитым средствам спецификации искомых знаний. Так, например, существенно упрощается процедура ассоциативного поиска знаков на основе априорной информации о связях между ними. Такой поиск осуществляется с помощью волновой навигации по пространству связанных знаков. Существенно упрощается также процедура ассоциативного поиска фрагментов хранимой БЗ, удовлетворяющих заданным запросам (требованиям), а также существенно расширяется многообразие видов таких запросов. Интегрированный решатель задач OSTIS-системы представляет собой иерархическую систему агентов, которые осуществляют обработку БЗ, представленную в SC-коде и хранимую в SC-памяти, и взаимодействуют между собой только через указанную память. Таким образом, весь процесс обработки БЗ в OSTIS-системе управляется самой БЗ. Агенты (называемые SC-агентами) подразделяются на неатомарные, представляющие собой коллективы SC-агентов более низкого уровня, и атомарные, не являющиеся коллективами SC-агентов. При этом каждому SC-агенту соот- ветствует свой класс ситуаций или событий в SC-памяти, инициирующих деятельность этого агента, порождая соответствующий информационный процесс в SC-памяти, основные характеристики и текущее состояние которого представляются в памяти и используются при выполнении этого процесса.
Заключение Обучаемость ИС, являясь их важнейшим свойством, создает хорошие предпосылки для существенного расширения жизненного цикла систем и обеспечения высокого уровня конкурентоспособности по сравнению с традиционными компьютерными системами. Но для обеспечения конкурентоспособности ИС, кроме их обучаемости, необхо- дима хорошо продуманная методика обучения (со- вершенствования). Управление обучением ИС имеет свою достаточно сложную специфику прежде всего в силу специфики объекта обучения. Особенно, если речь идет об ИС РВ. Рассмотрены методы машинного обучения с подкреплением (методы RL-обучения) на основе временных различий (TD-методы), ориентированные на перспективные ИС РВ, а также интеграция методов обучения с подкреплением и гибких алгоритмов, ориентированная на использование в составе ИС РВ типа ИСППР РВ. Предложена функциональная схема подсистемы прогнозирования для ИС РВ, интегрирующая методы машинного RL-обучения на основе темпоральных различий с гибким алгоритмом поиска решения. В настоящее время данная подсистема внедряется в разрабатываемый прототип ИСППР РВ для управления сложным технологическим объектом (одной из подсистем энергоблока АЭС) и его мониторинга. Отмечено, что высокий уровень обучаемости OSTIS-систем является основой для обеспечения высоких темпов эволюции самой технологии OSTIS, поскольку эта технология реализуется также в виде OSTIS-системы (метасистемы IMS.ostis). Важнейшими направлениями эволюции технологии OSTIS являются расширение и совершенствование структуры библиотеки многократно используемых компонентов OSTIS-систем, что обеспечивает существенное снижение трудоемкости разработки ИС и ИС РВ. Высокие темпы эволюции технологии OSTIS, открытый характер этой технологии, а также открытый характер участия в ее развитии (в рамках open-source проекта IMS.ostis) обеспечивают высокую конкурентоспособность и перспективность технологии OSTIS. Работа выполнена при финансовой поддержке РФФИ (проекты №№ 17-07-00553, 18-51-00007) и БРФФИ (проект № Ф16Р-102). Литература 1. Саттон Р.С., Барто Э.Г. Обучение с подкреплением; [пер. с англ.]. М.: БИНОМ. Лаборатория знаний, 2011. 400 c. 2. Еремеев А.П., Кожухов А.А. Реализация методов обучения с подкреплением на основе темпоральных различий и мультиагентного подхода для интеллектуальных систем реального времени // Программные продукты и системы. 2017. № 1. С. 28–33. 3. Башлыков А.А., Еремеев А.П. Методы и программные средства конструирования интеллектуальных систем поддержки принятия решений для объектов энергетики // Вестн. МЭИ. 2018. № 1. С. 72–85. 4. Осипов Г.С. Методы искусственного интеллекта. М.: Физматлит, 2015. 296 с. 5. Busoniu L., Babuska R., and De Schutter B. Multi-agent reinforcement learning: An overview. Berlin, Germany, Springer, 2010, vol. 310, рp. 183–221. 6. Еремеев А.П., Кожухов А.А., Гулякина Н.А. Исследование и реализация методов обучения с подкреплением для интеллектуальных систем реального времени // Нечеткие системы, мягкие вычисления и интеллектуальные технологии (НСМВИТ-2017): тр. VII Всерос. науч.-практич. конф. СПб: Политехника-сервис, 2017. С. 50–62. 7. Hansen E.A., Zilberstein S. Monitoring and control of anytime algorithms: A dynamic programming approach. J. of Artificial Intelligence, 2001, vol. 126, рp. 139–157. 8. Golenkov V.V., Gulyakina N.A., Grakova N.V., Nikulen- ka V.Y., Eremeev A.P., Tarasov V.B. From training intelligent systems to training their development means. Proc. Intern. Conf. OSTIS-2018. Minsk, 2018, pp. 81–98. 9. Тарасов В.Б. От многоагентных систем к интеллекту-альным организациям. М.: Эдиториал УРСС, 2002. 352 с. 10. Никуленков С.И., Тулупьев А.Л. Самообучающиеся системы. М.: Изд-во МЦНМО, 2009. 288 с. 11. Sutton R.S., Barto A.G. Reinforcement learning. London, The MII Press, 2012, 320 p. 12. Флах П. Машинное обучение. Наука и искусство поcтроения алгоритмов, которые извлекают знания из данных. М.: ДМК Пресс, 2015. 402 с. |
| Постоянный адрес статьи: http://swsys.ru/index.php?id=4451&like=1&page=article |
Версия для печати Выпуск в формате PDF (19.46Мб) |
| Статья опубликована в выпуске журнала № 2 за 2018 год. [ на стр. 239-245 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Реализация методов обучения с подкреплением на основе темпоральных различий и мультиагентного подхода для интеллектуальных систем реального времени
- Интеграция методов обучения с подкреплением и нечеткой логики для интеллектуальных систем реального времени
- Метод адаптивной классификации изображений с использованием обучения с подкреплением
- Автоматизированное детектирование и классификация объектов в транспортном потоке на спутниковых снимках города
- Адаптация модели нейронной сети LSTM для решения комплексной задачи распознавания образов
Назад, к списку статей