Алгоритмическое обеспечение программного комплекса технического обслуживания с контролем уровня надежности средств обеспечения полетов
| Допира Р.В. (rvdopira@yandex.ru) - НПО РусБИТех, пр-т Калинина, 17, г. Тверь, 170001, Россия (профессор, зав. отделом), г. Тверь, Россия, доктор технических наук, Дикарев В.А. (dikva@mail.ru) - Институт математики, информатики и естественных наук Московского городского педагогического университета (профессор, зав. кафедрой), Москва, Россия, доктор технических наук, Потапов А.Н. (potapov_il@mail.ru) - Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (доцент, зам. начальника кафедры), Воронеж, Россия, кандидат технических наук, Буешев Е.Е. (rvdopira@yandex.ru ) - Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (адъюнкт), Воронеж, Россия, Юрьев И.А. (rvdopira@yandex.ru ) - Центральный научно-исследовательский радиотехнический институт им. академика А.И. Берга (зам. начальника), Москва, Россия, кандидат технических наук | |
| Ключевые слова: программный комплекс, техническое средство, контроль, уровень надежности, техническое обслуживание, алгоритмическое обеспечение |
|
| Keywords: software package, technical means, control, level of reliability, maintenance service, algorithmic support |
|
|
|
|
Для успешного решения задачи определения рациональной периодичности проведения технического обслуживания (ТО) с использованием методов статистического прогнозирования предлагается алгоритм прогнозирования ТО технических средств (ТС) обеспечения полетов с контролем уровня надежности [1]. В отличие от известных постановок задачи при использовании предлагаемой системы ТО учитывалось требование периодичности ТО, а также то, что объем работ очередного ТО включает в себя все виды предшествующих. В качестве критерия эффективности проведения ТО с контролем уровня надежности рассматривается максимальная вероятность безотказной работы системы на заданном отрезке времени при ограничениях на суммарные затраты, связанные с проведением профилактических работ [2]. При этом предполагается, что отказ любого изделия приводит к отказу системы в целом. Таким образом, максимальная вероятность безотказной работы является гарантированным уров- нем надежности. Для большинства сложных объек- тов, содержащих большое количество различных элементов, используется экспоненциальный закон распределения вероятности безотказной рабо- ты [3]. Исходя из того, что отказ любого элемента приводит к отказу системы, математическую постановку задачи сформулируем следующим образом. Пусть функциональная система состоит из m элементов. Элемент j (j Î {1, 2, …, m}) имеет интенсивность отказов lj. При ТО с контролем уровня надежности вида i (i Î {1, 2, …, n}) контролю подвергается множество элементов Si (Si Ì Si+1, Sn, n = {1, 2, …, m}) c соответствующими затратами ri. Задано время эксплуатации Т. Требуется определить оптимальный набор периодов ТО элементов E* {t i* , i = 1, …, n} Ì E, при котором суммарные затраты R(E) не превышают допустимую величину R0 и выполняется условие
где t Î [0, T], P(E, t) – вероятность безотказной работы системы. С учетом повторяемости процесса изменения P(E, t) с периодом tn определялось Р(Е) как вероятность безотказной работы системы в момент времени, предшествующий очередной проверке n: P(E) = где Аi = Si /Si–1 – множество элементов системы, которые не проверялись к моменту ti ( Суммарные затраты R(E) с учетом того, что ТО вида i на интервале [0, ti+1] проводится ti+1/tI – 1 раз, определялись следующим образом:
Задача выбора оптимального набора периодов ТО сводится к отысканию набора Е* = {ti, i = 1, 2, …, n} интервалов времени между проверками ti, при котором
Данная задача решалась методом динамического программирования. Для этого вводились переменные xi (xi = ti+1/ti 1, 2, …, xn = T/tn = 1, 2, …) и t выражалось через xi: Тогда ai = T
Требуется найти набор Х* = (хi*, i = 1, 2, …, n), соответствующий оптимальной периодичности проверок, при котором выполняется условие (4). С помощью рекуррентного уравнения, полученного путем применения принципа оптимальности Беллмана, на каждом этапе вычислений определялась функция fi(Ri) – min суммарной интенсивности отказов при проведении проверок, решения о проведении которых были приняты на этапах 1, 2, …, i – 1 при заданном состоянии затрат R:
При последовательном вычислении fi(Ri) (i = 1, 2, …, n) на шаге n определяется fin(R0) = –ln P* (X*). Для решения уравнения (8) на каждом шаге i предварительно перебором находится множество значений вспомогательной функции:
0 £ Фi,b £ R0, a = 1, li-1, xi =1, 2, … Тогда {fi(Ri)} Í {Li(Ri)} определим в виде мажорирующей последовательности, потребовав для каждого члена a{fi(Ri)} выполнение условия fi,a =
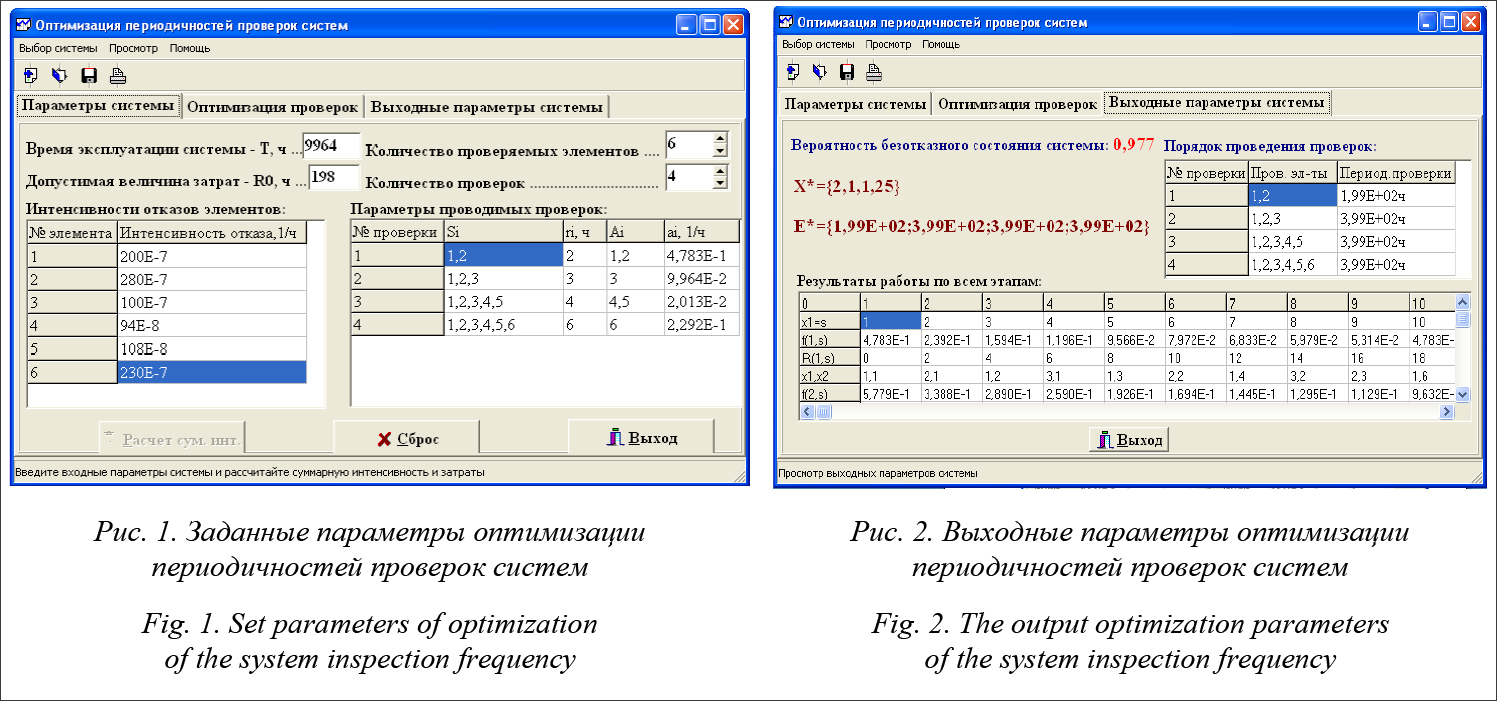
Программная реализация алгоритма ТО с контролем уровня надежности комплексов ТС обеспечения полетов Разработанный алгоритм ТО с контролем уровня надежности ТС обеспечения полетов, входящих в состав комплекса средств руководства полетами (КСРП-А), предназначенного для решения задач по автоматическому сбору и обработке информации о воздушной обстановке в аэродромной зоне и непосредственного управления полетами и посадкой воздушных судов с командно-диспетчерского пункта аэродрома, реализован в виде программного комплекса, позволяющего определить оптимальные периоды ТО [6, 7]. Работоспособность алгоритма была проверена на основе функционирования АРМ руководителя ближней зоны для контроля ТС радиосвязи [8]. С этой целью определена периодичность прове- дения четырех проверок шести элементов – интенсивность отказов элементов λj = ={2×10-7, 8×10-7, 1×10-7, 0,4×10-7, 0,8×10-7, 3×10-7}; – время эксплуатации элементов, входящих в состав КСРП-А, Т = 8640 ч; – затраты на проведение профилактических работ R0 = 15 ч. Из формул (2) и (5) определяются Ai и ai. Например: A3 = S3 \ S2 = {1, 2, 3, 4, 5} \ {1, 2, 3} = {4, 5}. Значения количества элементов – Si, затрат на проведение профилактических работ – ri (i = Таблица 1 Значения количества элементов, затрат на проведение профилактических работ, множество элементов системы и интенсивности отказов Table 1 The number of elements, the cost of maintenance works, a set of system elements and failure rate
Таблица 2 Значения элементов Table 2 The values of elements
Например, при х2 = 2 и 1,a = 1,3: L2,11 = (f1,3 = 2,88×10-2) (x2 = 2) + (a2 = 0,864×10-2) + + (a2 = 0,864×10-2) / (x2 =2) = 1,872×10-2, F2,11 = (R1,3 = 4)×(x2 = 2) + ((x2 = 2) – 1)×(r2 = 3) = 11. Из выражений (10) и (11) выделяется последовательность {f2(R2)}, члены которой отмечены номерами a в правом верхнем углу соответствующих клеток таблицы 2.
Например, пусть выделены первые четыре члена {f2(R2)}. Для определения члена a = 5 предварительно определяется подмножество С2,5. Для этого, используя (11), в таблице 2 отыскиваются члены {L2(F2)} с номерами b = 4, 8, 10, 17, отвечающие условию L2,b < f2,4 = L 2,3 = 3,744×10-2, и выделяется среди них подмножество С 2,5 = {4, 13} членов, обладающих минимальным F2,b = R2,b = 6, На следующих i = 3, 4 шагах поиска проводятся аналогичные вычисления, результаты которых приведены в таблице 3. Это означает, что элементы 1 и 2 необходимо проверять с периодичностью 199 ч, а элементы 1, 2, ..., 6 с периодичностью 399 ч. При этом вероятность безотказной работы Р* = 0,964 [9]. Из таблицы 3 –ln P* = f4,10 = 3,686, Х* = {3, 1, 1, 2} и Это означает, что элементы 1, 2 необходимо проверять с периодичностью 1 440 ч, а элементы 1–6 с периодичностью 4 320 ч. При этом вероятность безотказной работы Р* = 0,964. На рисунках 1 и 2 показаны, соответственно, заданные и выходные параметры оптимизации периодичностей проверок ТС обеспечения полетов на основе программного комплекса ТО с контролем уровня надежности.
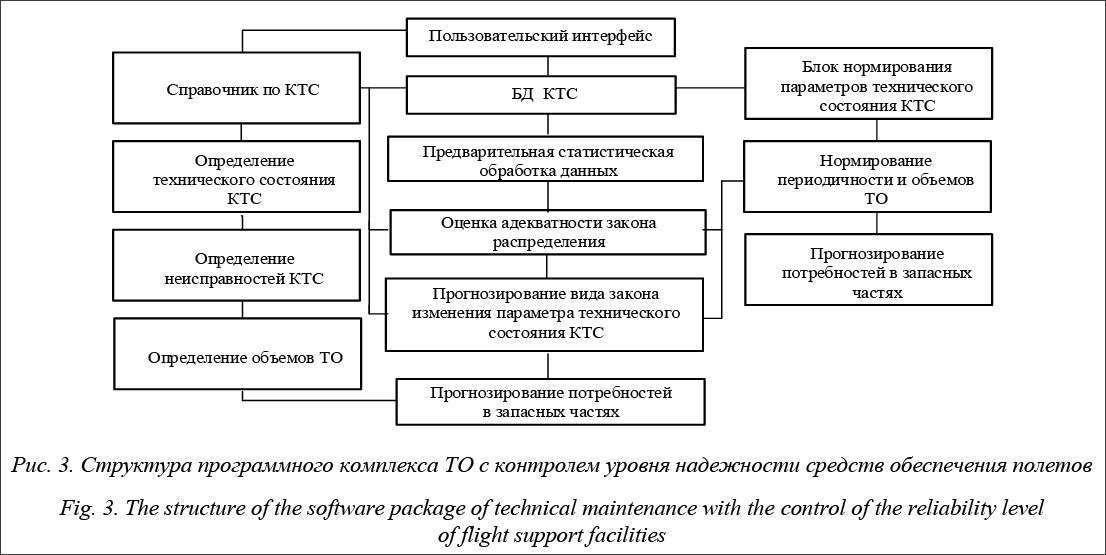
Структура программного комплекса ТО с контролем уровня надежности средств обеспечения полетов Разработанный алгоритм ТО с контролем уровня надежности комплекса технических средств (КТС) обеспечения полетов реализован в виде программного комплекса, структура которого представлена на рисунке 3.
Работоспособность данного алгоритма проверена на основе функционирования АРМ руководителя ближней зоны для контроля ТС средств радиосвязи. Программный комплекс ТО с контролем уровня надежности средств обеспечения полетов позволяет по техническому состоянию определить оптимальные периоды ТО КТС. Литература 1. Дикарев В.А. Обработка параметров системы информационного обеспечения авиационных комплексов радиоэлектронной борьбы // Радиотехника. 2001. № 4. С. 59–64. 2. Абу-Абед Ф.Н., Помазуев О.Н., Платонов А.Ю., Миро- нов А.М., Рюмшин А.Р. Методика определения показателей качества обнаружения радиолокационных станций // Программные продукты и системы. 2014. № 2. С. 118–124. 3. Буешев Е.Е. Техническая эксплуатация радиоэлектронных средств по состоянию // Основные направления адаптации объединенной системы ПВО государств-участников СНГ к решению задач воздушно-космической обороны: сб. матер. Междунар. воен.-науч. конф. 2016. Т. 1. С. 33–38. 4. Кирпичников А.П., Моисеев С.Н., Лебедев В.В., Сухарев В.А., Герасимов И.В., Олешко В.С., Ткаченко Д.П. Оп- тимизация методов технического обслуживания радиотехнических систем // Вестн. Казанского технологич. ун-та, 2013. № 14. С. 178–181. 5. Сысоев В.В., Крутских П.П., Свинцов А.А. Математическая модель информационного конфликта // Радиотехника. 2001. № 3. С. 77–80. 6. Лебедев В.В., Потапов А.Н. Оптимизация периодичности и объема профилактических работ при планировании и организации технического обслуживания комплексов («ОПОПР – ПОТОК»). Свид. о гос. регистр. прогр. для ЭВМ 2007610585. Российская Федерация. № 2006614190; заявл. 08.12.06; зарегистр. 06.02.07. 7. Бунин А.В., Потапов А.Н., Буешев Е.Е. Модернизированный метод формирования смешанной системы управления техническим состоянием на основе декомпозиции комплексов радиотехнических средств // Науч. вестн. МГТУ ГА. 2017. Т. 20. № 5. С. 61–74. 8. Александровская Л.Н. Современные методы обеспечения безотказности сложных технических систем. М.: Логос, 2003. 208 с. 9. Isermann R. Fault diagnosis of machines via parameter estimation and knowledge processing. Ibid. 2003, vol. 29, no. 4, pp. 815–835. 10. Gertler J. Survey of model-based failure detection and isolation in complex plants. Proc. IEEE Control Systems Magazine, 2008, vol. 21, no. 4, pp. 361–376. |
 , (1)
, (1) Pi(ti) =
Pi(ti) =  , (2)
, (2) = {1, 2, …, m}) [5].
= {1, 2, …, m}) [5]. , где tn+1 = T. (3)
, где tn+1 = T. (3) . (4)
. (4)
 (5)
(5) (6)
(6) . (7)
. (7) . (8)
. (8) ,
, (9)
(9) , (10)
, (10) . (11)
. (11) , (микросхемы со средней степенью интеграции, тран- зисторы германиевые до 2мВт, конденсаторы ке- рамические, резисторы пленочные, дроссели, катушки индуктивности), входящих в состав КСРП-А в ходе проведения профилактических работ, при следующих начальных данных [9]:
, (микросхемы со средней степенью интеграции, тран- зисторы германиевые до 2мВт, конденсаторы ке- рамические, резисторы пленочные, дроссели, катушки индуктивности), входящих в состав КСРП-А в ходе проведения профилактических работ, при следующих начальных данных [9]: ), множество элементов системы – Аi, которые не проверялись к моменту ti и интенсивности отказов ai, представлены в таблице 1. Далее находятся
), множество элементов системы – Аi, которые не проверялись к моменту ti и интенсивности отказов ai, представлены в таблице 1. Далее находятся  и R1,a = (x1 –1)×r1 £ R0 (х1 = a = 1, 2, ...). Значения суммарной интенсивности отказов f1,a, затрат R1,a и переменных х1 = a записываются в верхнюю строку таблицы 2. Для каждого возможного x2 и 1,a вычисляется L2,b, F2,b, X2,b = {x1, x2}, b =
и R1,a = (x1 –1)×r1 £ R0 (х1 = a = 1, 2, ...). Значения суммарной интенсивности отказов f1,a, затрат R1,a и переменных х1 = a записываются в верхнюю строку таблицы 2. Для каждого возможного x2 и 1,a вычисляется L2,b, F2,b, X2,b = {x1, x2}, b =  [10].
[10].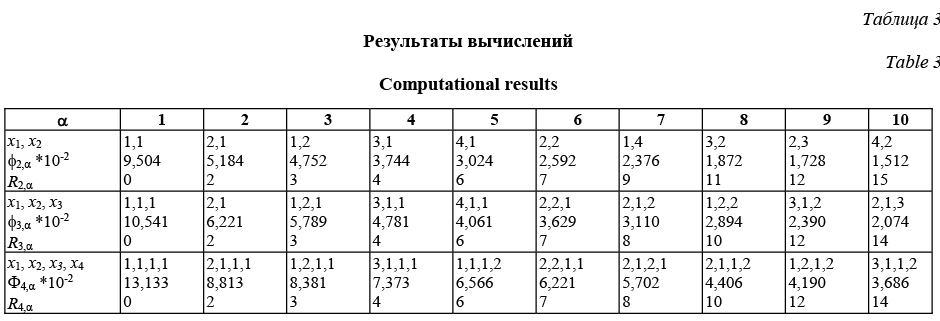
 Таким образом, пятым членом {f2(R2)} является член {L2,b} с номером b = 4.
Таким образом, пятым членом {f2(R2)} является член {L2,b} с номером b = 4. .
.
http://swsys.ru/index.php?id=4465&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Программное обеспечение АСУ тренажной подготовкой операторов эрготехнических радиоэлектронных средств
- Многофункциональный программный комплекс теплового проектирования электронных систем: требования к архитектуре и функциональным возможностям моделирования
- Программный комплекс обнаружения аномалий формы рельсовых путей
- Программный комплекс моделирования диаграммынаправленности фазированной антенной решетки и вычисления кодов фазовращателей
- Алгоритмическое и программное обеспечение символьных вычислений для логического дифференциального и интегрального исчислений