Алгоритм распознавания ситуаций в распределенной системе видеонаблюдения
| Кручинин А.Ю. (kruchinin-al@mail.ru) - Оренбургский государственный университет (доцент), Оренбург, Россия, кандидат технических наук, Колмыков Д.В. (malin.chyn@gmail.com) - Оренбургский государственный университет (магистр), Оренбург, Россия, Галимов Р.Р. (rin-galimov@yandex.ru) - Оренбургский государственный университет (доцент), Оренбург, Россия, кандидат технических наук | |
| Ключевые слова: распределенная система видеонаблюдения, распознавание нештатных ситуаций, многоагентная система |
|
| Keywords: distributed video surveillance system, contingency detection, multiagents systems |
|
|
|
|
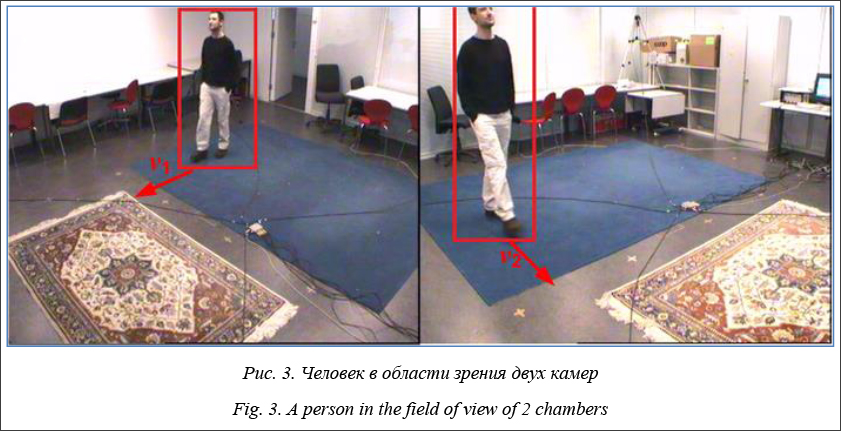
Современные системы видеонаблюдения часто охватывают большие территории с большим количеством видеокамер, за которыми операторам невозможно уследить. Поэтому для детектирования, слежения и идентификации объектов применяются алгоритмы компьютерного зрения [1, 2]. Однако в современных системах видеонаблюдения недостаточно только распознавать графические образы – требуется детектировать опасные ситуации, происходящие с этими образами. В данной работе принимается, что объект – это графический образ, событие – мгновенное совершение действия объектом или без объекта, ситуация – последовательность событий, то есть распознавание ситуаций – верхний уровень алгоритмов распознавания, которые оперируют с результатами распознавания графических образов. В простейшем случае ситуации можно разделить на два типа: нормальные и опасные. При возникновении опасной ситуации необходимо оповещать о ней заинтересованных лиц. Распределенная система видеонаблюдения характеризуется большим количеством камер и значительной территорией контроля, в которой объекты могут перемещаться из зоны наблюдения одной видеокамеры в другую. В связи с этим су- ществует необходимость в разработке новых алго- ритмов распознавания опасных ситуаций, позволя- ющих учитывать данные с множества камер. В настоящей статье предлагается алгоритм распознавания ситуаций в условиях объединения результатов с нескольких камер. При распознавании графического образа можно идентифицировать не только сам объект, но и совершаемое им действие. В результате распознавания последовательности кадров будет распознана последовательность образов: W = (w1, w2, w3, …, wN), где N – размер последовательности образов, каждый из которых соответствует одному из эталонных классов W1, W2, W3, …, WM, где M – общее количество классов образов. Из этой последовательности образов формируется последовательность событий: S = (s1, s2, s3, …, sK), где K ≤ N – размер последовательности событий. Известны структурные методы распознавания, применяемые в случае, когда объект распознавания сложен и для него можно составить грамматику для его описания. Если каждое событие обозначить символом грамматики и использовать вероятность того или иного события, можно построить и применить стохастическую грамматику. Сам процесс распознавания ситуаций аналогичен процессу поиска подстрок (шаблонов) в строке (цепочке собы- тий) в структурных методах распознавания [3]. Для распознавания ситуации в распределенной системе видеонаблюдения часто необходима информация о событиях, которые фиксируются в разных зонах, подконтрольных разным камерам. Например, человек что-то сделал в одной зоне, затем перешел в другую и сделал что-то там. События должны складываться, а общая последовательность событий анализироваться. С другой стороны, событие может происходить в области зрения одновременно нескольких камер, что может повысить достоверность распознавания за счет объединения результатов детектирования с разных точек наблюдения. В результате для распределенной системы видеонаблюдения можно выделить две основные задачи: - повышение достоверности распознавания события за счет совмещения результатов с нескольких камер; - распознавание ситуаций на основе событий, распределенных во времени и по местоположению. Решение этих задач позволит повысить достоверность распознавания ситуаций. При этом нужно понимать, что события, принадлежащие к определенной ситуации, происходят в одной или близлежащих зонах за небольшой период времени. В результате получается последовательность событий во времени с небольшими интервалами. Распределенные системы видеонаблюдения могут быть реализованы в виде двух основных архитектур: централизованной (с единым центром) и многоагентной (без единого центра). В централизованной архитектуре (рис. 1а) все камеры передают видеоданные в центр обработки для распознавания. Большое количество камер может привести к увеличению времени отклика системы из-за большой нагрузки на центр обработки данных. Скорость передачи видеоизображения может зависеть от расположения камеры. Недостатком подобной архитектуры является ее низкая надежность, так как выход из строя видеосервера приведет к отказу всей системы [4].
- передают соседям предварительно распознанные образы с целью совместного распознавания; если несколько камер распознают событие с низкой достоверностью, совмещение результатов их работы повышает достоверность распознавания; например, если среднее значение ошибки распознавания некоторого образа равно 0.4, то при совместной работе двух камер можно допустить, что применяется правило перемножения вероятностей для независимых образов, и вероятность ошибки составит 0.16; - передают распознанные цепочки событий соседним камерам для их объединения с цепочками с разных камер и распознавания ситуации в целом. Преимуществом данной архитектуры является высокая степень масштабируемости, надежности и оперативности. Недостаток подобного решения в необходимости использования высокопроизводительных камер с встроенной видеоаналитикой. При проектировании алгоритма распознавания ситуаций необходимо исходить из того, что в распределенной системе видеонаблюдения существуют несколько вариантов анализа ситуации: - распознавание в одной камере; - распознавание в камерах с пересекающимися областями зрения; - распознавание в камерах с известными координатами, но без пересечения области зрения, на основе объединения цепочек событий. Очевидно, что для реализации этих вариантов все камеры необходимо откалибровать с точки зрения координат камер и их углов поворота в пространстве. Автоматическая предварительная калибровка может осуществляться с помощью метода, описанного в работе [7]. Идентифицироваться объекты могут по уникальным признакам (особые точки, гистограммы яркости, скелет или контур объекта и др.), однако из-за низкого каче- ства изображения и малых размеров объектов сделать это не всегда возможно. Поэтому имеются некоторые контуры объектов, которые можно соотнести друг с другом в разных камерах, например по координатам. При невозможности определить местоположение объектов используются векторы движения распознанных объектов в кадре [8]. Образы с двух камер соотносятся друг с другом следующим образом:
где b – двумерный массив булевых переменных; vi – i-й вектор скорости, распознанный в первой камере; vj – j-й вектор скорости, распознанный во второй камере; thresh – некоторое заранее заданное пороговое значение. Если bij равно 1, то i-й объект первой камеры является объектом j второй камеры. Если разность нескольких векторов движения из одной камеры мало отличается от разности векторов движения из другой, то образы дополнительно соотносятся по цвету с помощью алгоритма сегментации watershed [9] и HOG-дескрипторов.
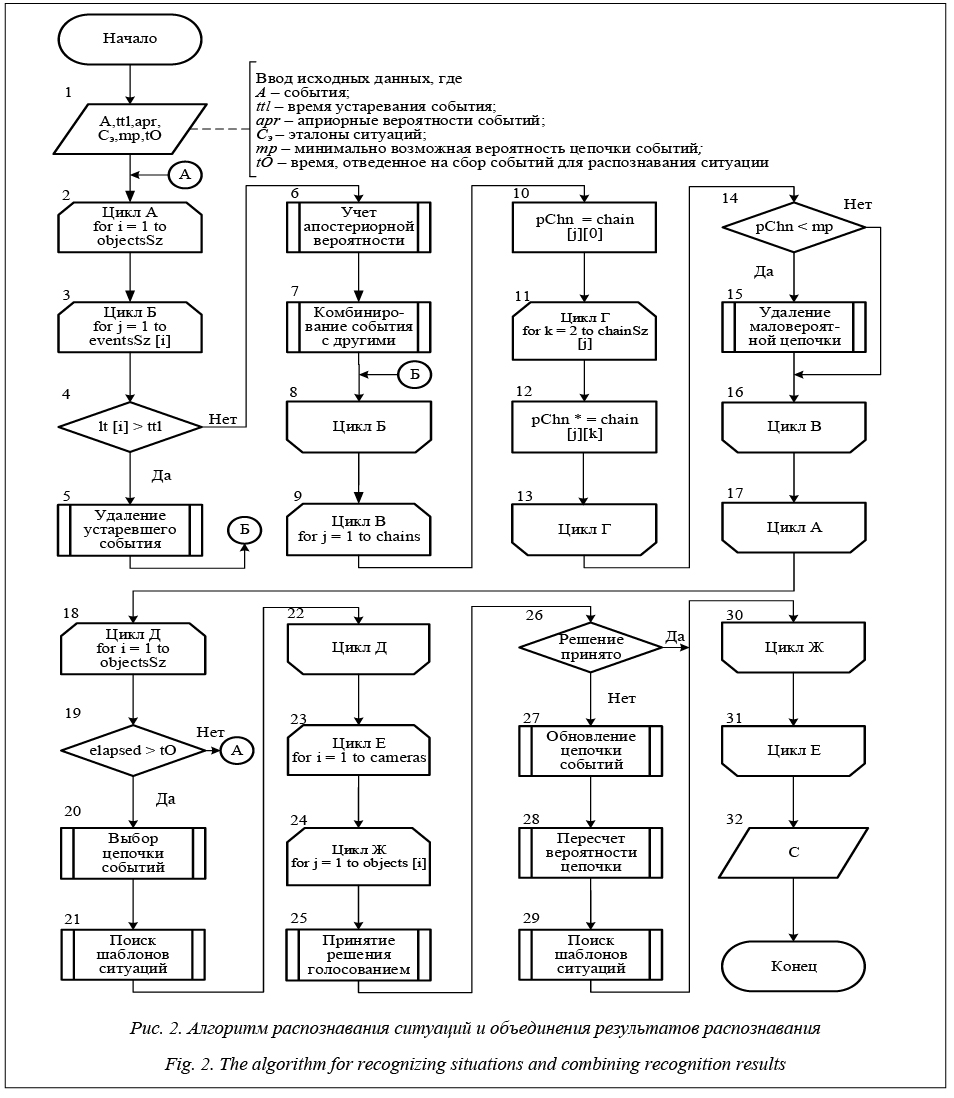
В блоках 2–17 осуществляется подготовка потока событий к распознаванию ситуаций. В связи с конечностью числа цепочки событий в распознаваемой ситуации и снижением требований к вычислительным ресурсам средств обработки данных устаревшие события удаляются из памяти. Если событие не устарело, в блоке 6 будет произведен пересчет вероятности события по формуле Байеса с учетом априорной и апостериорной вероятности этого события и результатов его распознавания с других камер. Сопоставление объектов в одной и другой камерах производится при помощи идентификаторов, в качестве которых выступают HOG-дескрипторы объектов, векторы скорости, а также цвет объекта. При превышении оценкой достоверности распознавания события в данной камере заданного порогового значения результаты текущего распознавания событий передаются близлежащим камерам. Это позволит формировать цепочки событий и у тех камер, в области зрения которых объект еще не появлялся. В блоке 7 происходит комбинирование событий во все возможные цепочки. Для каждого объекта формируется свое множество цепочек. В блоках 9–16 происходит вычисление вероятности цепочки событий в результате перемножения вероятности всех событий, входящих в нее. Если вероятность цепочки меньше минимально допустимой, эта це- почка будет удалена в блоке 15. В блоке 19 проверяется, вышло ли время, отведенное на сбор событий для распознавания ситуации. Если время не вышло, цепочка событий продолжает формироваться, если время вышло, в блоке 20 выбирается наиболее вероятная цепочка событий. Затем в блоке 21 происходит распознавание ситуации для объекта в отдельной камере. В блоках 23–31 объединяются результаты распознавания с разных камер. В блоке 25 делается первоначальная попытка быстро принять решение. Вначале данные запрашиваются со всех интересующих камер, затем сопоставляются объекты одной и другой камер (сравнение идентификаторов). Далее осуществляется попытка принятия решения через взвешенное умножение вероятностей распознанных ситуаций на разных камерах для одного объекта в некоторый момент времени. Значимость камеры зависит от ее характеристик, размещения и общего числа камер. Здесь же учитывается число камер, в которых была распознана одна ситуация, а также учитывается, что вероятность цепочек в разных камерах не должна превышать некоторое пороговое значение. Если полученный результат не меньше требуемого (то есть достоверен), то решение принимается, иначе выполняются блоки 27–29. В блоке 27 происходит пересоздание цепочки событий, но в новую цепочку входят все события, распознанные на всех камерах в заданный промежуток времени. В блоке 28 идет пересчет вероятности цепочки событий, а уже в блоке 29 выполняется распознавание новой, расширенной цепочки событий. В блоке 32 выводятся распознанные ситуации.
Алгоритм реализован в виде тестовой утилиты на языке программирования C++ в среде разработки Visual Studio 2013 и на первых этапах работает не с камерами, а с видеофайлами. В качестве методов распознавания низкого уровня использовались методы из библиотеки OpenCV (http:// opencv.org/). Утилита включает в себя следующие основные модули: - main (обработка аргументов программы и вызов функций распознавания); - video (получение и обработка видеопотока от устройства); - detection (детектирование графических объектов в кадре); - obj_recog (распознавание графических объектов); - event_recog (распознавание событий с графическими объектами); - probability (перерасчет вероятностей); - situation (распознавание ситуаций). Выходные результаты работы утилиты формируются в видеофайл, на рисунке 4 представлен пример изображения из него. Изображение взято из видеофайлов [11]. На рисунке вверху показан исходный кадр 326 из видеопотока, справа вверху – маска переднего плана, слева внизу – результаты распознавания без учета апостериорной информации, справа внизу – результаты распознавания с учетом апостериорной вероятности. В правом верхнем углу нижних частей изображения по- казано событие с наибольшей вероятностью. Тестирование утилиты проводилось в операционной системе Windows на различных вычислительных машинах. Результаты эксперимента показали увеличение достоверности распознавания при использовании данного алгоритма на 40 % по сравнению с вариантом, учитывающим только независимые события.
Так как данный алгоритм предполагает одновременное формирование цепочек событий камерами, которые связаны с возможной ситуацией, это позволит снизить время отклика системы. Алгоритм дает возможность распознавать ситуации на высоком уровне, оперируя с событиями, как с символами грамматики, и используя данные мно- жества камер. Преимуществом данного подхода является повышение достоверности распознавания ситуации за счет совмещения результатов работы нескольких узлов. Дальнейшая работа направлена на исследование стохастических грамматик, построенных по событиям в области зрения системы видеонаблюдения. Исследование выполнено при финансовой поддержке РФФИ и Министерства образования Оренбургской области в рамках научного проекта № 17-47-560368 р_а. Литература 1. Скрипкина А.А. Обзор методов обнаружения движущегося объекта по видеоизображениям // Перспективы развития информационных технологий. 2011. № 3-1. С. 126–129. 2. Обухова Н.А. Обнаружение и сопровождение движущихся объектов методом сопоставления блоков // Информационно-управляющие системы. 2004. № 1. С. 30–35. 3. Фу К. Структурные методы в распознавании образов; [пер. с англ. З.В. Завалишина, С.В. Петрова, Р.Л. Шейнина; под ред. М.А. Айзермана]. М.: Мир, 1977. 319 с. 4. Степин Д. Некоторые аспекты проектирования IP-систем видеонаблюдения // Алгоритм безопасности. 2014. № 6. С. 34–37. 5. Бурков А.В. IP-видеонаблюдение глазами разработчика. Ч. 1: Базовые понятия и IP-камера // Алгоритм безопасно- сти. 2016. № 6. С. 76–78. 6. Портнов Д. Современные тенденции встроенной видеоаналитики видеокамер // Алгоритм безопасности. 2016. № 6. С. 20–21. 7. Кручинин А.Ю. Автоматическая внешняя калибровка камер на основе анализа траекторий движений объектов // Информационные технологии в науке, образовании и производстве (ИТНОП): сб. тр. V Междунар. науч.-технич. конф. 2012. С. 1–6. 8. Колмыков Д.В., Кручинин А.Ю. Распознавание ситуаций в распределенной системе видеонаблюдения без единого центра // Прикладная математика и информатика: современные исследования в области естественных и технических наук: сб. тр. III науч.-практич. Всерос. конф. 2017. С. 276–280. 9. Meyer F. Colour image segmentation. Proc. IEE Int. Conf. Image Processing and Its Applications, 1992, pp. 303–306. 10. Сomputer Vision Laboratory CVLab. URL: http://cvlab. epfl.ch/data/pom (дата обращения: 20.08.2017). 11. CAVIAR Test Case Scenarios URL: http://homepages. inf.ed.ac.uk/rbf/CAVIARDATA1/ (дата обращения: 20.08.2017). |



http://swsys.ru/index.php?id=4469&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Кроссплатформенная поисковая мультиагентная система
- Ресурсно-целевые сети
- Проблема специализации в иерархических обучающихся системах управления на примере задачи фуражировки
- Интегрированная система обработки структурированных физических знаний
- Технология и средства автоматизации имитационного моделирования процессов управления региональной безопасностью