Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Сравнение адаптивного и жесткого алгоритмов управления дорожным движением на базе имитационной модели в среде AnyLogic
Аннотация:Рост автомобильного парка и объема перевозок обусловили увеличение интенсивности движения, что в условиях городов с исторически сложившейся застройкой приводит к возникновению транспортной проблемы. Особенно остро она проявляется в узловых пунктах улично-дорожной сети. Проблемы связаны с увеличением транспортных задержек, образованием очередей и заторов, что, в свою очередь, вызывает снижение скорости сообщения, неоправданный перерасход топлива и повышенное изнашивание узлов и агрегатов транспортных средств. Есть два пути решения проблемы: инженерно-строительные работы (расширение проезжей части, применение сложных развязок дорожной сети) и применение АСУ дорожным движением. Использование первого варианта является дорогостоящим и занимает долгое время от разработки до сдачи объекта в применение. Второй вариант менее глобальный в плане изменения дорожной сети, но более продуктивный. АСУ дорожным движением, в свою очередь, также бывает нескольких видов. Жесткий алгоритм настраивается вручную специально обученным оператором, что не всегда удобно и эффективно. Адаптивный алгоритм подстраивается автоматически под поток, что более удобно во время так называемого часа пик. Наблюдаемое в течение суток изменение интенсивности движения требует соответствующего изменения дли-тельности цикла и разрешающих сигналов. Многопрограммное жесткое управление не способно учитывать кратковременные случайные колебания в числе автомобилей, подходящих к перекрестку. Применение АСУ дорожным движением на основе адаптивного алгоритма позволит решить проблему с увеличением интенсивности движения в городах. Общегородская система должна быть основана на принципах, обеспечивающих максимальную эффективность управления и надежность функционирования системы. Совершенствование и развитие АСУ дорожным движением имеет особое значение для любого крупного мегаполиса.
Abstract:The growth of an automobile park and traffic volume led to increasing traffic intensity. This causes a transport problem in the conditions of cities with historically developed buildings. The problem is especially serious in key points of the street-road network. The problem is related to the increase in transport delays, queues and traffic jams, which in turn causes a reduction in the communication speed, unjustified fuel overexpenditure and increased wear of vehicle units and assemblies. There are two ways to solve the problem: engineering and construction works (widening the carriageway, applying complex road interchanges) and using automated traffic control system (ATCS). The first option is expensive and takes a long time from development to putting the object into use. The second option is less global in terms of changing a road network, but more productive. There are several types of ATCS. A specially trained operator sets up a hard algorithm manually, which is not always convenient and effective. The adaptive algorithm automatically adjusts to the flow, which is more convenient during the so-called “rush hour”. The change in traffic intensity observed during the day requires a corresponding change in a cycle duration and enable signals. The multi-program rigid control is not capable of taking into account short-term random fluctuations in the number of cars approaching an intersection. The use of ATCS based on the adaptive algorithm will solve the problem with increasing traffic in cities. The citywide ATCS should be based on principles that ensure maximum management efficiency and reliability of the system. The improvement and development of ATCS is essential to any major metropolis.
| Авторы: Шамлицкий Я.И. (2538357@mail.ru) - Сибирский государственный университет науки и технологий им. академика М.Ф. Решетнева (доцент), Красноярск, Россия, кандидат технических наук, Охота А.С. (okhota.sanya@mail.ru) - Сибирский государственный университет науки и технологий им. академика М.Ф. Решетнева (магистрант), Красноярск, Россия, Мироненко С.Н. (2538357@mail.ru) - Сибирский государственный университет науки и технологий им. академика М.Ф. Решетнева (аспирант ), Красноярск, Россия | |
| Ключевые слова: автоматизированная система управления дорожным движением, адаптивный алгоритм, жесткий алгоритм, испытания, anylogic, методика расчета |
|
| Keywords: automated traffic control system, adaptive algorithm, rigid algorithm, test, anylogic, calculation method |
|
| Количество просмотров: 7875 |
Статья в формате PDF Выпуск в формате PDF (19.46Мб) |
Движение в условиях перегруженности дорог транспортными и пешеходными потоками требует инновационных способов регулирования. В последнее время все большую актуальность приобретают автоматизированные системы управления дорожным движением (АСУДД), представляющие собой комплекс технических средств, реализующий определенные технологические алгоритмы управления транспортными потоками [1–6]. Разработка АСУДД идет и в других странах. Концепция увеличения глубины прогнозирования на сетевом уровне реализовалась в алгоритме, включенном в систему UTOPIA (Urban Traffic Optimization by Integrated Automation – оптимизация городских транспортных потоков посредством интегрированной автоматики), разработка которого началась в 80-х годах в Италии [7]. Эта система установлена в настоящее время в 20 городах Европы, включая Рим (160 перекрестков), Осло и Хельсинки. Право на ее установку принадлежит фирме Mizar (Милан). Алгоритм предполагает реализацию принципа декомпозиции выработки решений, который можно считать общепринятым для сетевых адаптивных методов управления. В основе декомпозиции управления лежит разбиение района на вза- имно перекрывающиеся зоны. Центром каждой зоны является регулируемый перекресток, а сама зона охватывает все перекрестки, смежные с центральным. Основная цель введения АСУДД заключается в уменьшении суммарных задержек транспортных средств на определенном участке дорожной сети, в зоне действия этой системы – на перекрестке, в районе или городе. Общие требования к АСУДД определены ГОСТ 24.501-82. Одним из главных параметров, характеризующих движение на улично-дорожной сети (УДС), является интенсивность движения транспортных средств в потоке. При этом интенсивность движения на регулируемом участке дорожной сети можно разделить на две составляющие [8]: - интенсивность прибытия транспортных средств на подходе к участку дорожной сети; - интенсивность убывания очереди транспортных средств после включения разрешающего сигнала светофора. Основные характеристики (длина очереди в определенный момент времени, продолжительность периода, в течение которого n-е требование ожидает обслуживания, средняя продолжительность пребывания заявки в системе и т.д.) иногда требуют сложных вычислений. Поэтому возникла идея использовать для оценки критериев движения транспортных потоков такую характеристику, как коэффициент загрузки: k = N⁄P, (1) где N – интенсивность поступления требований; P – скорость обслуживания требований. Принципиальное значение имеет точность методики расчета величины средней задержки, так как на ее основе оценивается длина очередей и определяется суммарная задержка. В России для практических расчетов величины средней задержки рекомендуется формула Вебстера, по которой где C – длительность цикла, с; λ – относительная эффективная длительность зеленого сигнала; x – коэффициент насыщения; q – интенсивность движения, прив.ед./с. Входящие в состав формулы (2) λ, x и q определяются следующим образом: λ = g/C; (3)
q = Q/3600. (5) Здесь g – эффективная длительность зеленого сигнала, с; Q – интенсивность движения, прив.ед./ч; M – поток насыщения, прив.ед./ч. Под суммарной задержкой понимается задержка всех транспортных средств за определенный период в пределах рассматриваемой УДС или ее участка. Суммарная задержка как критерий качества управления движением использовалась Миллером [8]. Показатель тесно коррелирует с длиной очереди, средней задержкой и интенсивностью движения. Суммарная задержка более подходит для экономической оценки эффективности ОДД в масштабах целой УДС или городского района, чем средняя задержка, которая в основном характеризует качество обслуживания отдельно взятого транспортного средства [8]. Максимальной задержкой считается наибольшая задержка одного из транспортных средств за рассматриваемый период. Она тесно коррелирует с величиной входящего на перекресток потока и длиной очереди на подходе к перекрестку. Продолжительность максимальной задержки может использоваться как показатель степени перенасыщения перекрестка, но сама методика ее определения значительно сложнее, чем других видов задержек, поэтому ее рассматривают главным образом как дескриптор. В руководстве HCM 2000 [9] в качестве показателя уровня обслуживания на регулируемых и нерегулируемых пересечениях используется задержка, вызванная регулированием (ControlDelay). Термин ControlDelay имеет следующее определение: задержка, возникающая в результате замедле- ния или остановки и измеряющаяся как разница между затратами времени при движении без ре- гулирования. Объяснение этому термину дает диаграмма, изображенная на рисунке 1. В связи с применением нового критерия границы уровней обслуживания на регулируемых пересечениях получили значения, приведенные в таблице 1 [9]. Далее по тексту этот показатель будет называться задержкой, вызванной организацией движения, и обозначаться ACD (AverageControlDelay).
Таблица 1 Градации уровней обслуживания для регулируемых пересечений (HCM 2000) Table 1 Service level gradations for adjustable intersections (HCM 2000)
Если в процессе мероприятий, обеспечивающих оптимизацию работы регулируемого пересечения, удалось добиться улучшения обслуживания хотя бы на один уровень, то такой результат является значительным и свидетельствует о корректности выбора метода управления транспортными потоками. В качестве платформы для создания имитационной модели была выбрана среда моделирования AnyLogic 6.9.0 University (версия для образовательных учреждений).
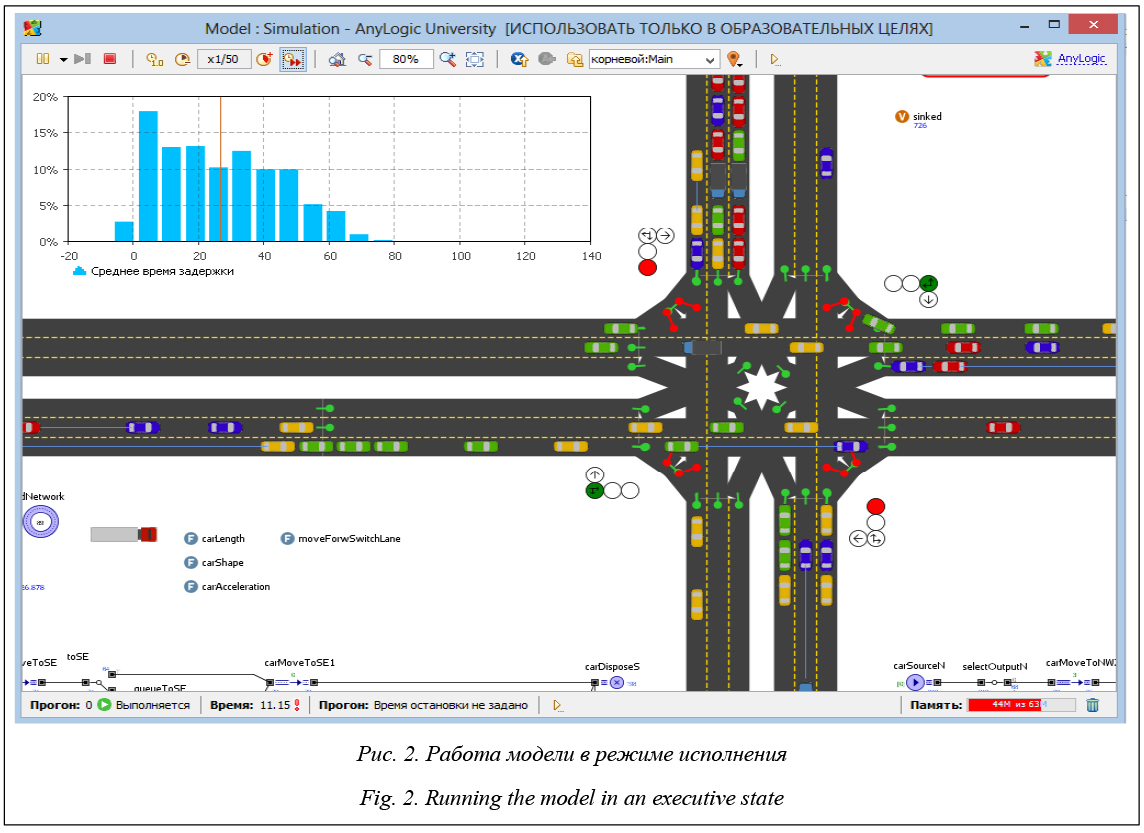
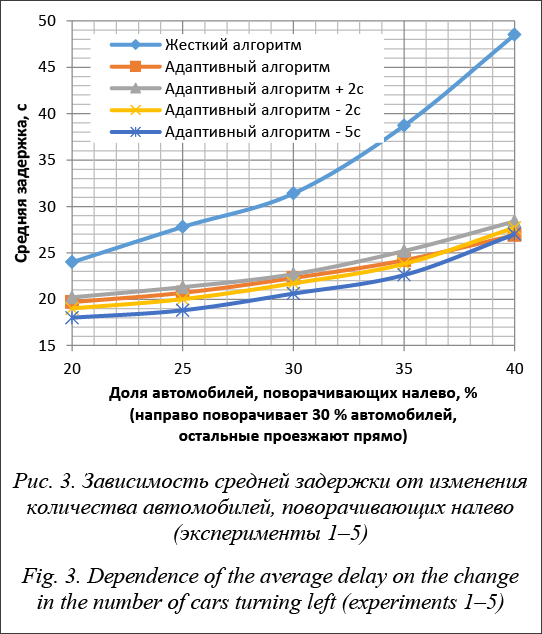
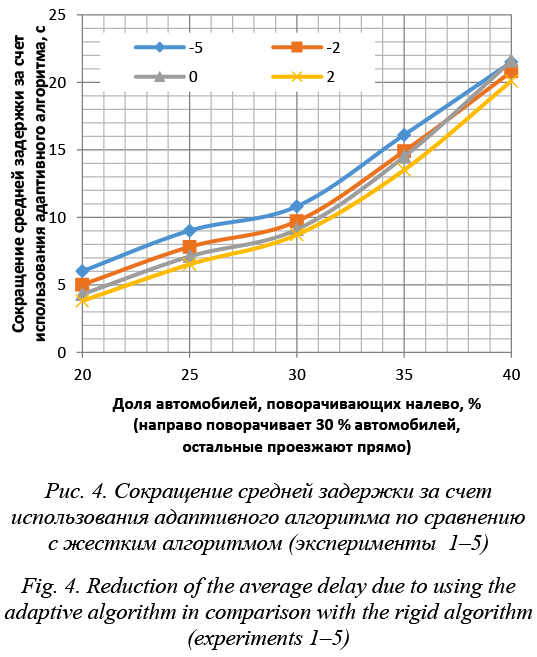
- четырехстороннее пересечение с примыкающими с каждой стороны дорогами; - разделительная полоса на каждой дороге, делящая ее на две проезжие части по три полосы в каждом направлении; - система генерации агентов модели – транспортных средств двух типов: легковой автомобиль и грузовой автомобиль грузоподъемностью от 2 до 6 тонн; - четыре блока логики движения транспортных средств (по одному на каждое направление); - модели элементов световой сигнализации – светофоры типа Т.1.л; - диаграмма состояний, моделирующая ло- гику переключения сигналов светофоров, основан- ную на двухкольцевой фазировке; - модуль системной динамики, моделирующий работу контроллера локального пересечения; - блок управляющих параметров модели; - элементы управления параметрами модели; - модуль чтения параметров цикла жесткого регулирования из внешнего файла MSExcel; - модуль сбора статистики параметров агентов; - гистограмма распределения задержки транспортных средств, показывающая также среднее время задержки всех транспортных средств на всем протяжении эксперимента (рис. 2). Разработанная с помощью AnyLogic 6.9.0 имитационная модель может быть использована для поддержки принятия решений и охватывает все этапы проведения исследований с помощью имитационного моделирования. Для проведения исследований алгоритма была разработана методика проведения эксперимента. Входящими параметрами модели являются: - интенсивности прибытия транспортных средств с северного IN, восточного IE, южного IS и западного IW подходов, авт./мин.; - распределение автомобилей по направлениям (налево, прямо, направо) для каждого подхода, %: для северного подхода – pNлев., pNпрям., pNправ.; для восточного подхода – pEлев., pEпрям., pEправ.; для южного подхода – pSлев., pSпрям., pSправ.; для запад- ного подхода – pWлев., pWпрям., pWправ.. Всего было проведено 6 серий испытаний. Первая серия испытаний (эксперименты 1–5) проводилась с целью определения зависимости средней задержки на пересечении от доли автомобилей, поворачивающих налево. Входящие параметры и результаты первой серии испытаний представлены в таблице 2. Графические зависимости показаны на рисунках 3 и 4.
Таблица 2 Входящие параметры и результаты для серии испытаний с изменяющейся долей транспортных средств, поворачивающих налево Table 2 Incoming parameters and results for a series of tests with a variable part of vehicles turning left
Как видно на рисунках 3 и 4, применение алгоритма адаптивного управления позволяет существенно сократить задержки транспортных средств, которые увеличиваются при повышении интенсивности транспортного потока, поворачивающего налево. При повышении интенсивности автомобилей, движущихся налево, разработанный алгоритм лучше справляется с организацией разъезда транспортных средств. Кроме того, корректирование максимальной продолжительности работы зеленого сигнала показало, что средняя задержка при этом может быть уменьшена на 1–2 с при уменьшении времени работы зеленого сигнала на 3–6 с. Вторая серия испытаний (эксперименты 6–10) проводилась с целью определения зависимости средней задержки на пересечении от доли автомо- билей, поворачивающих направо. Применение алгоритма адаптивного управления дает существенное сокращение средней задержки, которое в данном случае остается относительно постоянным при изменении доли транспортных средств, поворачивающих направо. Тем не менее, при повышении интенсивности автомо- билей, движущихся направо, разработанный алгоритм лучше справляется с организацией разъезда автомобилей. Корректирование длительности зеленого сиг- нала светофора показало, что средняя задержка в этом случае может быть уменьшена на 1–1,5 с при уменьшении длительности зеленого сигнала на 2–5 с. Третья серия испытаний (эксперименты 11–15) проводилась для определения зависимости средней задержки на участке дорожной сети от доли автомобилей, проезжающих в прямом направлении. Применение алгоритма адаптивного управления дает существенное сокращение средней задержки, которое в данном случае уменьшается по мере увеличения доли транспортных средств, проезжающих прямо. В любом случае при повышении интенсивности автомобилей, движущихся прямо, разработанный алгоритм лучше справляется с организацией разъезда автомобилей. Корректирование максимального времени работы зеленого сигнала светофора показало, что число средней задержки может уменьшиться на 0,5–2 с при уменьшении длительности зеленого сигнала на 2–5 с. Четвертая серия испытаний (эксперименты 16–20) проводилась с целью определения зависимости средней задержки от интенсивности движения транспорта при равномерной загрузке подходов. Входящие параметры и результаты четвертой серии испытаний представлены в таблице 2. Применение алгоритма адаптивного управления позволяет существенно сократить величину средней задержки, которая в данном случае увеличивается по мере увеличения интенсивности движения авто. Это свидетельствует о том, что разработанный алгоритм лучше справляется с организацией разъезда транспортных средств, чем алгоритм жесткого регулирования. Корректирование максимального времени работы зеленого сигнала светофора показало, что величина средней задержки может быть уменьшена на 0,5–2,5 с при уменьшении длительности зеленого сигнала на 2–5 с. Пятая серия испытаний (эксперименты 21–25) проводилась с целью определения зависимости средней задержки на пересечении от интенсивности движения транспортных средств при неравномерной загрузке подходов (восточный и западный подходы – на 20 % меньше). Применение алгоритма адаптивного управления дает существенное сокращение средней задержки; особенно сильно эффект проявляется при высокой интенсивности прибытия транспортных средств. Это свидетельствует о том, что разработанный алгоритм лучше справляется с организацией разъезда транспортных средств, чем алгоритм жесткого регулирования. Корректирование максимального времени работы зеленого сигнала показало, что средняя задержка в этом случае может быть уменьшена на 1–2 с при уменьшении длительности зеленого сигнала на 2–5 с. Шестая серия испытаний (эксперименты 26–30) проводилась с целью определения зависимости средней задержки на пересечении от интенсивности движения транспортных средств при неравномерной загрузке подходов (восточный и западный подходы – на 40 % меньше). Как видно из рисунков 3 и 4, применение алгоритма адаптивного управления дает существенное сокращение средней задержки; при увеличении интенсивности прибытия транспортных средств эффект сокращения средней задержки незначительно возрастает. Это свидетельствует о том, что разработанный алгоритм лучше справляется с организацией разъезда транспортных средств, чем алгоритм жесткого регулирования. Корректирование максимальной длительности зеленого сигнала показало, что средняя задержка в этом случае может быть уменьшена на 1–1,5 с при уменьшении длительности зеленого сигнала на 2–5 с. В результате проведенных исследований можно сделать следующие выводы. Применение разработанного алгоритма управления потоками транспортных средств на основе методов адаптивного управления способствует сокращению величины средней задержки на пересечении во всех рассмотренных диапазонах изменения входящих параметров и способствует повышению уровня обслуживания (LOS), что позволяет утверждать о корректности выбора методов адаптивного управления в качестве основ алгоритма. Работа данного алгоритма является более устойчивой по сравнению с работой алгоритмов, основанных на использовании чистых методов локального адаптивного управления транспортными потоками, что подтверждается экспериментальными данными, полученными с помощью имитационной модели в ходе изменения параметров модели в широком диапазоне значений. Сокращение средней задержки варьируется в широком диапазоне в зависимости от входящих параметров транспортных потоков, что свидетельствует о необходимости дальнейшей проработки алгоритма с целью выявления факторов, осложняющих работу алгоритма адаптивного управления, а также способов уменьшения влияния этих факторов на работу алгоритма. При увеличении доли транспортных средств, движущихся в прямом направлении, работа алгоритма адаптивного управления в наибольшей степени приближается к работе алгоритма жесткого регулирования. В общем случае можно утверждать, что выбор способа определения максимальной длительности зеленого сигнала для адаптивного алгоритма в первом приближении является верным. При увеличении интенсивности движения транспортных средств сокращение средней задержки в сравнении с жестким алгоритмом возрас- тает, что обусловливает необходимость примене- ния методов адаптивного управления транспортными потоками в городах районного, областного и федерального значения, особенно на тех улицах, где в моменты пиковых интенсивностей дорожного движения образуются множественные заторы. Проведенный анализ показывает, что мероприятия по реорганизации дорожного движения в крупных городах, основанные на внедрении АСУДД, способствуют оздоровлению городской логистики путем снижения количества заторовых ситуаций на дорогах, уменьшению вредных выбросов выхлопных газов транспортных средств и снижению издержек, связанных с эксплуатацией транспортных средств. Литература 1. Teply S., Allingham D.I., Richardson D.B., Stephen- son B.W. Canadian Capacity Guide for Signalized Intersection, 1995, 117 p. 2. Врубель Ю.А. Исследования в дорожном движении. Минск: Изд-во БНТУ, 2007. 178 с. 3. Кременец Ю.А., Печерский М.П., Афанасьев М.Б. Технические средства организации дорожного движения. M.: Академкнига, 2005. 279 с. 4. Mn/DOT Traffic Signal Timing Coordination Manual, 2011. 184 p. 5. Левашев А.Г., Михайлов А.Ю. Основные параметры оценки пропускной способности регулируемых пересечений. М.: Изд-во ВИНИТИ, 2004. № 3. С. 14–19. 6. Малыханов А.А., Кумунжиев К.В., Черненко В.Е. Среда имитационного моделирования транспортных систем // Автоматизация в промышленности. 2010. № 1. С. 34–37. 7. Mauro V., DiTaranto C. UTOPIA. Control, Computers, Communications in Transportation, 1990, pp. 245–252. 8. Traffic control in oversaturated street networks. NCRHP report, 1978, no. 194, 152 p. 9. Highway Capacity Manual. TRB, Washington, DC. 2000, 1134 p. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , (2)
, (2) ; (4)
; (4)
| Постоянный адрес статьи: http://swsys.ru/index.php?id=4474&page=article |
Версия для печати Выпуск в формате PDF (19.46Мб) |
| Статья опубликована в выпуске журнала № 2 за 2018 год. [ на стр. 403-408 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Сравнение эффективности адаптивных алгоритмов светофорного регулирования в среде AnyLogic
- Моделирование транспортных потоков в среде AnyLogic
- Программа моделирования электронной аппаратуры при ударных воздействиях
- Нейросетевое приложение для оценивания характеристической экспоненты процесса Леви на примере распределения Бандорффa-Нильсена
Назад, к списку статей