Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Программа расчета настроек регуляторов методом расширенных частотных характеристик
Аннотация:В статье рассмотрена постановка задачи расчета настроек типовых общепромышленных регуляторов в системах автоматического управления технологическими объектами. Показана возможность применения критерия устойчивости Найквиста для расширенных частотных характеристик систем. Сформулирована задача обеспечения необходимого качества переходного процесса в замкнутой системе за счет обеспечения заданной степени колебательности. Получено условие заданной колебательности системы, обеспечивающее нахождение настроек регулятора на линии равного затухания. Рассмотрена расширенная частотная характеристика ПИД-регулятора для случая введения в нее составляющей в виде реального дифференцирующего звена. Получены формулы для нахождения настроек ПИД-регулятора с использованием расширенных частотных характеристик в виде параметрических зависимостей. Приведены соотношения, получающиеся из общих формул для ПИ- и ПД-регуляторов. На основе предложенного метода в среде MatLab разработана программа, позволяющая рассчитать оптимальные настройки регулятора по критерию минимального отклонения времени переходного процесса и перерегулирования от заданных значений. Приведены результаты расчета настроек ПИД-регулятора для контрольного примера и полученные линии равного затухания. Показаны наилучшие по критерию качества переходные процессы для каждой из линий равного затухания и оптимальный процесс, удовлетворяющий требуемым характеристикам качества. Показаны недостатки метода расширенных частотных характеристик в предложенной постановке. Рассмотрены возможности альтернативной постановки задачи синтеза настроек регуляторов и применение предложенных методов для нахождения настроек регуляторов в многоконтурных системах автоматического управления технологическими объектами.
Abstract:The paper considers the problem of calculating settings of typical general industrial controllers in automatic control systems for technological objects. It shows the possibility of applying the Nyquist stability criterion for extended system frequency characteristics. It also formulates the problem of ensuring the necessary quality of a transient process in a closed system due to the provision of the given degree of oscillation. The obtained condition for the given system oscillation ensures that the controller settings are located on the equal damping line. The paper considers the extended frequency characteristic of the PID controller for the case when a component is introduced into it as a real differentiating element. The authors have obtained the formulas for finding PID controller settings using extended frequency characteristics in the form of parametric dependencies. There are also relations obtained from general formulas for PI and PD controllers. A program developed in MatLab based on the proposed method allows calculating optimal controller settings by the criterion of minimum deviation of transient time and overshoot from the set values. There are also the results of calculating PID controller settings for a control example and the obtained equal damping lines. The paper presents the best transient processes for each of the equal damping lines and the optimal process satisfying the required quality characteristics. It also shows the disadvantages of the method of extended frequency characteristics in the proposed formulation. The paper considered the possibilities of alternative formulation of the problem of synthesizing controller settings and the application of the proposed methods for finding controller settings in multi-loop systems for automatic control of technological objects.
| Авторы: Марголис Б.И. (borismargolis@yandex.ru) - Тверской государственный технический университет (зав. кафедрой), г. Тверь, Россия, доктор технических наук, Мансур Г.А. (gubran_ali@mail.ru) - Тверской государственный технический университет (аспирант), Тверь, Россия | |
| Ключевые слова: система автоматического управления, перерегулирование, оптимальные настройки, программа расчета, линия равного затухания, степень колебательности, переходный процесс, расширенная частотная характеристика, расчет настроек, регулятор, объект, критерий качества |
|
| Keywords: the system of automatic control, overshoot, optimal settings, calculation program, equal damping line, oscillation degree, transient response, extended frequency response, calculation of settings, controller, subject, quality criteria |
|
| Количество просмотров: 10165 |
Статья в формате PDF Выпуск в формате PDF (29.03Мб) |
При автоматизации технологических процессов важную роль играет определение настроек регуляторов. Наибольшее применение находят одноконтурные замкнутые системы автоматического регулирования (САР) с типовыми линейными законами регулирования. В разомкнутой цепи такой системы находятся последовательно соединенные регулятор и объект регулирования с передаточными функциями W(p) и Wp(p) соответственно [1]. В отличие от большинства существующих методов расчета настроек регуляторов [2–4], в которых показателем качества являются интегральные критерии, метод расширенных частотных характеристик (РЧХ) обеспечивает определение множества настроек регулятора (линии равного затухания (ЛРЗ)), обеспечивающих заданную степень колебательности m переходного процесса замкнутой системы [5]. Согласно критерию Найквиста [5, 6], для расширенной частотной характеристики (РЧХ) [7] условием заданной колебательности в замкнутой САР является прохождение расширенной амплитудно-фазовой характеристики (АФХ) разомкнутой системы через точку (–1, j×0). Обозначая расширенные частотные характеристики объекта и регулятора через W(m, w) и Wp(m, w), получим вышеуказанное условие в виде
откуда Wp(m, w) = – 1/ Wp(m, w). (1) Находя значения расширенной частотной передаточной функции объекта W(m, w) и подставляя их в формулу (1), получим значения РЧХ регулятора Wp(m, w). Пусть действительная часть РЧХ регулятора – R(w), а мнимая часть – I(w), тогда Wp(m, w) = – 1/W(m, w)= R(w) + jI(w). (2) Подставляя в (2) выражения для РЧХ объекта регулирования и регулятора и разрешая систему относительно настроечных параметров регулятора, можно получить уравнение ЛРЗ в параметрическом виде, где параметром является частота w. Произведем вывод расчетных соотношений ЛРЗ для случая типового общепромышленного ПИД-регулятора, рассматривая остальные законы регулирования как частный случай ПИД-закона. В отличие от приведенных в [6, 7] соотношений для описания дифференциальной составляющей ПИД-регулятора используется не идеальное, а реальное дифференцирующее звено [6]. Запишем РЧХ ПИД-регулятора:
Избавляясь от комплексности в знаменателе второй и третьей частей уравнения, получим:
Приравнивая действительную часть выражения (4) к R(w), а мнимую к I(w) и решая систему этих двух уравнений относительно пропорциональной K1 и интегральной K0 настроек, получим уравнения ЛРЗ для системы с ПИД-регулятором в виде
При K2 = 0 получим уравнения ЛРЗ для системы c ПИ-регулятором. Подставляя в (5) K0 = 0, получим уравнения ЛРЗ для системы c ПД-регулятором:
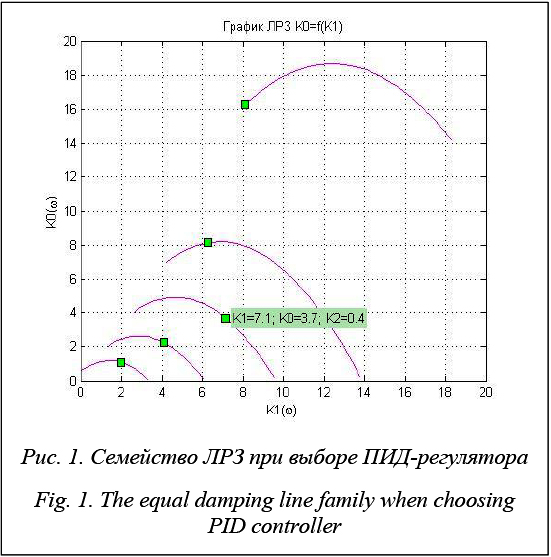
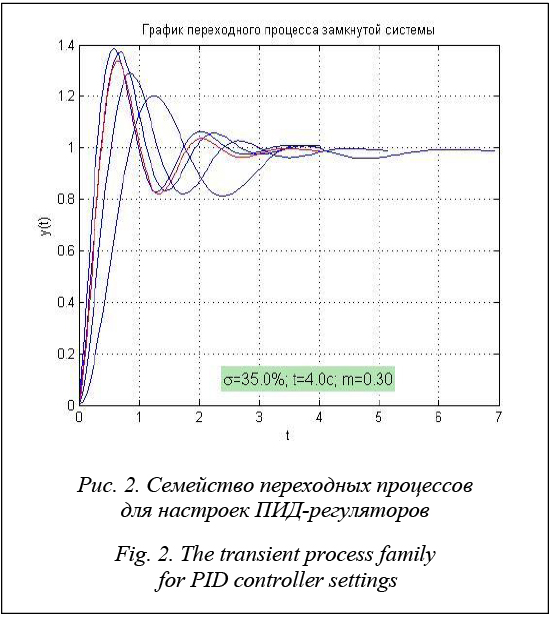
Приведем текст программы для нахождения настроек регуляторов методом РЧХ [8, 9] в среде Matlab: clear close all clc W=tf([3],[1 2 2]) m=0.3 % степень колебательности w=[0.1:0.1:7]; % диапазон частот tz=4; % желаемое время регулирования sigz=32; % желаемое перегулирование Tf=0; % постоянная времени фильтра [num,den]=tfdata(W,'v'); r=roots(den); Wreg=-polyval(den,(j-m)*w)./polyval(num,(j-m)*w); % РЧХ регулятора R=real(Wreg); % действительная часть РЧХ регулятора I=imag(Wreg); % мнимая часть РЧХ регулятора K2=[0 0.2 0.4 0.6 1 2 5] n=length(K2); for i=1:n % по настройкам K2 znam=(1-Tf*m*w).^2+(Tf*w).^2; K1=R-m*I+m*K2(i)*w.*(2-Tf*(m+1)*w)./znam; K0=-(m^2+1)*I.*w+((m^2+1)*K2(i)*w.*w)./znam; kp=0; K1_plus=[]; K0_plus=[]; % положительные настройки for j=1:length(K1) if (K1(j)>0) && (K0(j)>0) && (K0(j)*K2(i)/K1(j)^2<=0.25) kp=kp+1; K1_plus(kp)=K1(j); K0_plus(kp)=K0(j); end; end; if (length(K1_plus)>0) figure(1) plot(K1_plus,K0_plus,'m') grid on; title('График ЛРЗ K0=f(K1)'); xlabel('K1(\omega)'); ylabel('K0(\omega)'); hold on krit=[]; for k=1:kp WPID=tf([K2(i)+Tf*K1_plus(k) K1_plus(k)+Tf*K0_plus(k) K0_plus(k)],[Tf 1 0]); Wzam=feedback(W*WPID,1,-1); krit(k)=Jkrit(Wzam,tz,sigz,m); end; [Jmin,kmin]=min(krit); K1_min=K1_plus(kmin); K0_min=K0_plus(kmin); K1_opt(i)=K1_min; K0_opt(i)=K0_min; Jopt(i)=Jmin; Wreg_opt=tf([K2(i)+Tf*K1_min K1_min+Tf*K0_min K0_min],[Tf 1 0]) plot(K1_min,K0_min,'--rs','MarkerEdgeColor', 'k','MarkerFaceColor','g','MarkerSize',8) Wzam_opt=feedback(W*Wreg_opt,1,-1); [y,t]=step(Wzam_opt); figure(2) plot(t,y,'b') grid on; title('График переходного процесса замкнутой системы'); xlabel('t'); ylabel('y(t)'); hold on chars=Quality(Wzam_opt); chars_opt(i)=chars; end; end; [Jbest,kbest]=min(Jopt) K1_best=K1_opt(kbest); K0_best=K0_opt(kbest); K2_best=K2(kbest); Wreg_best=tf([K2_best+Tf*K1_best K1_best+Tf*K0_best K0_best],[Tf 1 0]) figure(1) inf=strcat('K1=',num2str(K1_best,'%0.1f'),'; K0=',num2str(K0_best,'%0.1f'),... '; K2=',num2str(K2_best,'%0.1f')); text(1.05*K1_best,K0_best,['\fontsize{10}',inf],'BackgroundColor',[.7 .9 .7]); figure(2) Wzam_best=feedback(W*Wreg_best,1,-1); [y,t]=step(Wzam_best); plot(t,y,'r') inf=strcat('\sigma=',num2str(chars_opt(kbest).perereg,'%0.1f'),'%; t=',... num2str(chars_opt(kbest).tproc,'%0.1f'),'c; m=', num2str(chars_opt(kbest).m,'%0.2f')); text(0.6*t(end),0.1,['\fontsize{12}',inf],'BackgroundColor',[.7 .9 .7]); Семейство ЛРЗ для приведенных в программе значений K2 представлено на рисунке 1.
При расчете использована колебательная передаточная функция объекта регулирования W(p) = = 3/(p2 + 2p +2). Для выбора оптимальных настроек регулятора используется критерий, характеризующий минимальное отклонение перерегулирования s, времени tp и степени колебательности m переходного процесса замкнутой системы с регулятором от их заданных значений, соответственно sзад., tзад. и mзад.:
Текст функции Jkrit для расчета критерия оптимальности: function J=Jkrit(Wzam,tz,sigz,m) chars=Quality(Wzam); J=abs(chars.tproc-tz)/tz+abs(chars.perereg-sigz)/sigz+abs(chars.m-m)/m; Определение характеристик качества chars производится с помощью функции Quality, текст которой выглядит следующим образом: function chars=Quality(sysw) [numw,denw]=tfdata(sysw,'v'); chars.numw = numw; chars.denw = denw; [y,t]=step(sysw); chars.y=y; chars.t=t; maxy=max(y); np=length(y); yyst=y(np); if yyst<=1.E-3 chars.perereg=1.E6; else chars.perereg=(maxy-yyst)/yyst*100; end; chars.tproc=t(np); p=pole(sysw); chars.roots=p; re=real(p); im=imag(p); re_im=abs(nonzeros(diag(im~=0)*re)./nonzeros(im)); if isempty(re_im) chars.m=1.E6; else chars.m=min(re_im); end;
Недостатком приведенного метода РЧХ является сведение пространственной задачи нахождения настроек ПИД-регулятора K1, K0, K2 к решению двухмерной задачи в области параметров K1, K0 при фиксированных значениях K2. В связи с этим в качестве дальнейшего развития метода РЧХ можно предложить переход от набора параметров (K1, K0, K2) к набору (K1, Tд/Tu, Tu), где Tu = K1/K0 и Tд = K2/K1 – постоянные времени, соответственно интегрирования и дифференцирования. Кроме того, метод работает некорректно, если желаемая степень колебательности системы m больше степени колебательности объекта mоб. Полученные результаты расчета настроек регуляторов можно использовать для оптимального управления объектами в технологических процес- сах, а также распространить на многоконтурные системы управления [10]. Наличие в Matlab возможностей удобной работы с массивами и графического вывода данных позволяет эффективно использовать эту среду программирования для решения задач нахождения оптимальных настроек регуляторов. Литература 1. Иванов В.А., Медведев В.С., Чемоданов Б.К., Ющенко А.С. Математические основы теории автоматического управления. М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. Т. 1. 551 с. 2. Писарев А.В., Новиков С.И. Сравнительные исследования расчетных методов определения параметров настроек промышленных ПИД-регуляторов // Энергетика и теплотехника: Сб. науч. тр. 2007. Вып. 11. С. 191–200. 3. Денисенко В. ПИД-регуляторы: вопросы реализации. Ч. 2 // Современные технологии автоматизации. 2008. № 1. С. 86–97. 4. Смирнов Н.И., Сабанин В.Р., Репин А.И. Структурная и параметрическая оптимизация каскадных САР с использованием эволюционных алгоритмов // Автоматизация и IT в энергетике. 2010. № 5. С. 26–34. 5. Ротач В.Я. Теория автоматического управления. М.: Изд-во МЭИ, 2005. 396 с. 6. Марголис Б.И. Компьютерные методы анализа и синтеза систем автоматического регулирования в среде Matlab. Тверь: Изд-во ТГТУ, 2015. 92 с. 7. Токарев В.В., Ягубов З.Х., Приезжаев А.Б., Скаб- кин Н.Г. Расчет оптимальных параметров промышленных автоматических систем регулирования. Ухта: Изд-во УГТУ, 2003. 84 с. 8. Лазарев Ю. Моделирование процессов и систем в MATLAB. СПб: Питер, 2005. 512 с. 9. Дьяконов В.П. MATLAB 7.*/ R2006/ R2007: самоучитель. М.: ДМК Пресс, 2008. 768 с. 10. Марголис Б.И., Мешков И.С. Синтез регуляторов в каскадных системах автоматического управления // Вестн. ТвГТУ. 2016. Вып. 29. № 1. С. 74–79. References
|
 ,
, (3)
(3) (4)
(4) (5)
(5) (6)
(6)
 (7)
(7)
| Постоянный адрес статьи: http://swsys.ru/index.php?id=4511&like=1&page=article |
Версия для печати Выпуск в формате PDF (29.03Мб) |
| Статья опубликована в выпуске журнала № 3 за 2018 год. [ на стр. 636-639 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Структурная схема нечеткого регулятора на основе лингвистических переменных с четкими термами
- Построение структуры предметной области на основе анализа концептуальной схемы
- Использование энтропийных мер в задачах оценки информативности признаков распознавания образов
- Некоторые технологические аспекты создания учебно-тренировочных средств подготовки командиров и специалистов Военно-морского флота
- Разработка программного обеспечения для системы автоматического управления по выравниванию полуфабрикатов
Назад, к списку статей