Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Алгоритмы управления процессами в реагирующих сенсорных сетях для задач защиты объектов
Аннотация:Локализация, классификация и отслеживание объектов вторжения в защищаемую зону особо важных объектов составляют основу системы их защиты. Цель автора статьи – исследование путей повышения эффективности функционирования системы путем использования распределенных сенсорных сетей в составе киберфизических систем. Показано, что достижение этой цели предполагает организацию взаимодействия алгоритмов отслеживания с традиционными алгоритмами инициализации/маршрутизации в сенсорных сетях. Рассматривается проблема совместной обработки данных узлами в распределенных сенсорных сетях. Предметом рассмотрения являются актуальные и сложные методы отслеживания множества движущихся объектов в защищаемой зоне, реализация которых средствами сенсорных сетей предполагает решение ряда проблем, среди которых следует выделить две основные. Первая – это разработка эффективных методов обмена информацией между локальными узлами в зоне вторжения, вторая – организация совместной обработки сигналов группой узлов на основе собранной информации о состоянии среды в зоне их ответственности в результате наступления событий. Показано, что основные этапы процедуры отслеживания состоят из обнаружения целей, их классификации, оценок местоположения и прогнозирования траектории передвижения цели. Модельным примером реализации процедуры принята задача обнаружения, локализации и отслеживания проникновения одного объекта в защищаемую зону. Рассмотрены подходы, лежащие в основе этих алгоритмов, а также основные аспекты их реализации. Предлагаемые решения учитывают ограничения, связанные с возможностями локальных уз-лов, сетью в целом и маршрутизацией. Источником данных для предлагаемых алгоритмов являются сигналы от звуковых, сейсмических, тепловых и т.п. сенсоров, у которых мощность сигнала имеет выраженный максимум в зависимости от расстояния от цели до узла сети. Полученные результаты распространяются на проблему отслеживания множества объектов, что предполагает оценку применимости методов идентификации и классификации в условиях, когда наблюдается наложение воспринимаемых сигналов сенсорами разных объектов. Обсуждаются алгоритмы для решения таких задач.
Abstract:Localization, classification and tracking of objects intruding into the protected zone of especially im-portant objects form the basis of their protection system. The purpose of the article is to study ways to improve the efficiency of the system by using distributed sensor networks as a part of cyber-physical systems. It is shown that achieving this goal involves organizing the interaction of tracking algorithms with traditional initialization/routing algorithms in sensor networks. The paper considers the problem of joint data processing by nodes in distributed sensor networks. The subject of consideration is actual and complex methods for tracking a multitude of moving objects in a protected area, their implementation by means of sensor networks involves solving a number of problems including the two main ones that should be singled out. The first problem is the development of effective methods of information exchange between local nodes in the invasion zone. The second problem is the organization of joint processing of signals by a group of nodes based on the collected in-formation about the environmental state in their area of responsibility as a result of the occurrence of events. It is shown that the main tracking procedure stages consist of target detection, their classification, location estimates and target movement trajectory prediction. A model example of the procedure im-plementation is the task of detecting, localizing and tracking the penetration of one object into the pro-tected area. The paper considers the approaches underlying these algorithms, as well as the main as-pects of their implementation. The proposed solutions take into account the limitations associated with the capabilities of local nodes, the network as a whole and routing. The source of data for the proposed algorithms are signals from sound, seismic, thermal, etc. sensors, in which the signal power has a pronounced maximum de-pending on the distance from the target to the network node. The obtained results are applied to the problem of tracking a plurality of objects, which involves as-sessing the applicability of identification and classification methods under conditions where there is an overlap of perceived signals by sensors by different objects. There is also a discussion of the algo-rithms for solving such problems.
| Авторы: Виноградов Г.П. (wgp272ng@mail.ru) - Тверской государственный технический университет (профессор), Тверь, Россия, доктор технических наук | |
| Ключевые слова: распределенная обработка данных, сенсорные сети, обнаружение, локализация цели, классификация, отслеживание |
|
| Keywords: synthetic flexible model, sensor networks, detection, target localization, classification, tracking |
|
| Количество просмотров: 4300 |
Статья в формате PDF |
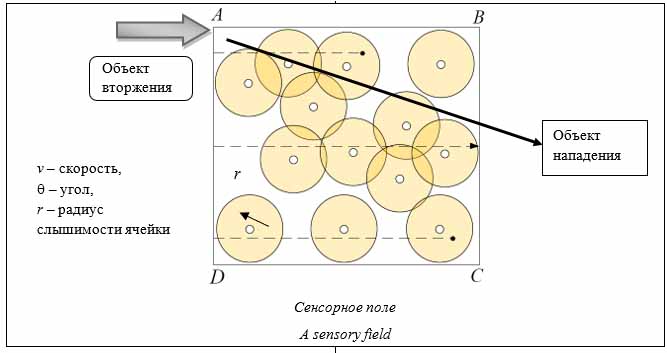
Системы защиты от вторжения в настоящее время рассматриваются как составная часть киберфизических систем, в которых беспроводные сенсорные сети (БСС) осуществляют интерфейс между физическим миром и информационными технологиями [1–4]. Важнейшей характеристикой этих приложений является длительность жизненного цикла, определяемая возможностями энергетической системы сенсорной сети [5]. Ограниченное количество энергии, содержащейся в аккумуляторе каждого узла, должно обеспечивать множество функций, таких как работа датчиков, обработка сигналов на борту и связь с соседними узлами. Мониторинг зоны защиты средствами БСС требует решения задач обнаружения, классификации, идентификации и отслеживания в общем случае множества целей. Известно, что детерминированный поток вторжений в сенсорную сеть оказывает наиболее сильное воздействие на длительность ее жизненного цикла, особенно при вторжении быстродвижущихся целей [5]. Их отражение требует от системы защиты быстрой реакции и значительных вычислительных затрат. Это ставит перед разработчиками ряд проблем. Одна из них связана с тем, что, хотя узел БСС может воспринимать информацию в нескольких модальностях, он имеет ограниченные коммуникационные и вычислительные возможности по локализации и отслеживанию целей. Другая – это организация совместной обработки сигналов (Collaborative Signal Processing, CSP) группой узлов без привлечения ресурсов сети в целом, например, при определении типов целей, на основе собранной информации в зоне их ответственности в результате обработки событий проникновения. Возможные подходы и варианты решения описаны в [6]. Рассматриваемые алгоритмы обнаружения и отслеживания основаны на обработке сигналов одним узлом, в то время как локализация и отслеживание множества целей требуют совместной работы группы узлов. Централизованная обработка данных в сети требует интенсивной работы вычислительных средств как отдельного узла, так и сети в целом, а значит, больших энергетических затрат. Требование повышения живучести системы защиты от вторжения предполагает разработку энергоэффективных методов и алгоритмов обработки сигналов, низкую частоту дискретизации, малоэнергоемких протоколов обмена информацией между узлами. Его выполнение связано с наделением CSP набором следующих функций. Распределенная обработка. Сигналы сенсоров после считывания должны предварительно обрабатываться на отдельных узлах, а не передаваться напрямую по беспроводному каналу. Результат обработки должен храниться на локальных узлах и передаваться другим узлам по запросу или после обработки событий. Обработка по событию. Каждый узел выполняет только те задачи обработки сигналов, которые имеют отношение к текущему событию [7]. При отсутствии события/запроса узел должен переходить в режим сна, чтобы минимизировать потребление энергии. Информация от конкретного узла в пункт управления пересылается только после обработки события определения факта проникновения или по запросу, а не автоматически с заданным шагом дискретизации. Агрегирование информации. Для обобщения информации о состоянии защищаемой зоны на основе локальных данных пространственно-временной природы CSP должна выполнять эффективное иерархическое агрегирование информации. Тогда низкая пропускная способность сети будет достаточной для передачи информации от отдельных узлов к пункту управления и через него к узлам сети при отслеживании целей. Более высокая пропускная способность потребуется при выполнении классификации целей по данным временных рядов, которыми должны обмениваться соседние узлы сети. Динамическая кластеризация. В зависимо- сти от характера решаемой задачи, например, при локализации объектов вторжения, могут потребоваться использование кластеров меньшего размера, чем полученные при инициализации сети, и более высокая частота опроса узлов. Шаг дискретизации по времени и пространственным координатам должен либо настраиваться, либо иметь достаточное количество возможных значений. Входные данные для обнаружения и локализации объектов БСС Защиту границ критически важных инфраструктур, таких как атомные и гидроэлектростанции, обеспечивают БСС, содержащие реагирующие узлы [7]. Объекты вторжения обнаруживаются, когда входят в зоны ответственности узлов сети. Объект проникновения в процессе движения генерирует акустические, сейсмические, тепловые и другие сигналы. Величина уровня мощности воспринимаемого сенсорами сигнала определяется расстоянием узел–цель. Спектр сигналов будет иметь максимум при прохождении цели над узлом или в непосредственной близости и может рассматриваться как индивидуальная характеристика цели. Это позволяет рассматривать спектр сигналов как сигнатуру и использовать при определении типа цели. Подобное предположе- ние обсуждалось, например, в работах [8–10]. Положение узла, фиксирующего максимум сигнала, можно также использовать для определения координат цели, а локализация цели равносильна отслеживанию местоположения максимума во времени и пространстве при прохождении целью точек доступа сети. Событие «обнаружение цели» будет возникать тогда, когда выход сенсора узла превысит некоторый порог, величина которого регулируется так, чтобы частота ложной тревоги не превышала некоторую настраиваемую норму, чтобы исключить влияние шумовых эффектов. Узел кластера передает головному узлу следующие данные: время начала события, при котором выход датчика превышает порог; показание датчика во время прохождения целью зоны ответственности узла; значение максимума; время окончания события, когда выход датчика падает ниже порога. Отметим, что в существующих БСС частота дискретизации по времени определяется протоколом и рядом других факторов, таких как рельеф местности, наличие преград, градиенты температуры и характер сигнала. Шаг дискретизации может превышать 20 секунд для экономии энергии и определяется также требованиями скрытности сети. Таким образом, возникает проблема поиска компромисса между сохранением живучести сети и ее эффективностью, решаемая протоколом CSP. Значение сигнала сенсора конкретного узла изменяется при перемещении объекта в его зоне ответственности и воспринимается широковещательно, то есть все узлы, в радиусе восприятия которых находится цель, ее «слышат». Узлы, «слышащие» цель, считывают значения спектра сигнала цели в определенные моменты времени при ее движении. Тем самым формируются пространственная и временная выборки поля фактической сигнатуры цели. В этом случае плотность размещения узлов должна быть достаточной для определения зависимости уровня сигнала от расстояния узел–цель. По аналогии временные ряды значений уровня сигнала от датчиков каждого узла должны формироваться с частотой, соизмеримой со скоростью движения цели. Таким об- разом, характер изменения поля пространственно-временной сигнатуры и характер запроса определяют требуемую частоту дискретизации в пространстве-времени и количество активизируемых узлов. Для обеспечения отслеживания цели и эффективной локальной обработки данных в сенсорной сети в [11] предложено разделить область проникновения на пространственно-временные ячейки (окна). Их размер зависит от скорости, направления движения цели и от показателя затухания прохождения сигнала в среде. Размер ячейки должен приблизительно соответствовать области, внутри которой в течение некоторого времени спектр считываемой сигнатуры остается практически постоянным, а его падение на границах не превышает некоторого порогового значения. Это предполагает введение пространственно-временных координат в анализ, а также динамическую коррекцию размера пространственно-временных ячеек на основе прогнозируемых местоположений, типов целей и показателей их движения. Усреднение пространственно-временного сигнала по узлам в каждой ячейке-кластере позволит уменьшить влияние шума и повысить эффективность алгоритмов локализации, определения типа цели и ее отслеживания, а также уменьшить объем передаваемых данных. Задачи обнаружения, локализации и отслеживания цели в БСС Экономичное в смысле затрат энергии решение задач обнаружения, локализации и отслеживания одной цели в распределенной сенсорной сети предполагает взаимодействие между сетевыми протоколами, протоколами маршрутизации и алгоритмами CSP. Маршруты передачи информации сетевыми протоколами в сенсорной сети традиционно определяются по минимуму расстояния прохождения сигнала [5, 9]. То есть структура сети не ориентирована ни на обработку событий в локальной области зоны, ни на распределенную форму решения задач локализации, классификации и отслеживания группой узлов для снижения расхода энергии аккумуляторов. Пространственно-временная коррекция размера ячеек в регионе проникновения защищаемой зоны путем разделения на более мелкие области (пространственные ячейки), в которых выполняется предположение о постоянстве сигнатуры, позволяет исключить эту ситуацию. Одиночная цель. Пусть область, в которой расположены сенсорные узлы и фиксируется факт появления объекта вторжения, имеет вид прямоугольника ABCD (см. рисунок). Определим на углах этой области четыре ячейки – A, B, C и D и предположим, что цель может войти в контролируемую область через один из четырех углов области, например, через ячейку A. Узлы этой ячейки активируются при обнаружении цели. Активизированный узел запускает алгоритм обнаружения объекта вторжения.
Шаг 1. Часть, а возможно, все узлы в ячейке A обнаруживают цель. Эти узлы становятся активными узлами, а ячейка A – активным кластером. Активные узлы передают информацию о времени проникновения и результатах измерений спектра сигнала головному узлу в N последовательные моменты времени. Шаг 2. В каждый момент времени головные узлы определяют местоположение цели по выходам сенсоров активных узлов. Простейшей оценкой местоположения цели в данный мо- Шаг 3. Головные узлы используют данные о местоположении цели в N последовательные моменты времени для прогнозирования местоположения цели в M (< N) на цикл опроса узлов. Шаг 4. Предсказанные положения цели используются протоколами для активизации или создания новых ячеек, в которые цель, скорее всего, может попасть. Подмножество этих ячеек активируется протоколами для продолжения обнаружения и отслеживания цели. Шаг 5. Как только цель обнаружена в одной из новых ячеек, она обозначается как новая активная ячейка, а узлы в исходной активной ячейке переводятся в состояние сна для экономии энергии. Все шаги повторяются для новой активной ячейки. Для каждой обнаруженной цели передается сообщение, содержащее информацию об отслеживании: местоположение цели, время обнаружения, время прохождения зоны ответственности от текущей активной ячейки в следующую. Аналогичные алгоритмы рассматриваются в [6]. Множественные цели. Пусть несколько целей проникают в разные области защищаемой зоны в разные моменты времени и эти области достаточно разделены пространственно. Это допущение означает, что выходной сигнал датчика спектра конкретного узла будет содер- жать различимые пики в конкретные моменты, соответствующие сигнатурам разных целей. Тогда может быть использована процедура, описанная выше: для каждой цели инициируется и поддерживается свой трек отслеживания. Если предположение о достаточном разделении положения цели в пространстве и/или времени не соответствует реальности, то необходимы алгоритмы классификации, которые используют базу пространственно-временных сигнатур целей. Ее формирование предполагает наличие априорных знаний о типовых сигнатурах для различных классов целей. Использование этих знаний позволяет предложить алгоритм определения типа цели одним узлом (без взаимодействия между узлами) на основе отслеживания сигнатур целей во времени. Узел формирует сегмент временного ряда обнаруженного события и направляет его для классификации в головной узел. Соответствующий алгоритм выполняет обработку, например, с помощью быстрого преобразования Фурье (БПФ), преобразованный вектор сравнивается с имеющимися в базе и определяется наиболее подходящая сигнатура. Выходные данные классификатора о такой сигнатуре, соответствующей цели, передаются на головные узлы для определения отличий от выходных данных результатов измерения другими узлами. Ша- ги 1–5 повторяются для создания и поддержания треков при построении и прогнозировании направления и будущего местоположения нескольких классифицированных целей. Алгоритмы обработки сигналов Обнаружение выполняется путем измерения спектра сигнала цели. Для этого выходной сигнал активных узлов отбирается с заданным шагом. Размер окна и частота дискретизации определяются характеристиками цели, такими как скорость движения сигнатуры и ожидаемая продолжительность ее нахождения в активной ячейке, и конкретным способом измерения. Событие обнаруживается, когда выходной сигнал детектора превышает пороговое значение. Выходные параметры узла, передаваемые головным узлам, состоят из начального времени, когда выход детектора превышает пороговое значение, времени фиксации максимума энергии сигнала (CPA), текущих значений выходного сигнала детектора во время CPA и времени ухода, когда выход датчика узла падает ниже порогового значения. Для локализации цели выходной сигнал узла фиксируется и передается в моменты времени начала проникновения и ухода цели из зоны узла. Определение местоположения цели в последовательные моменты времени может быть реализовано различными алгоритмами [8–10, 12, 13]. Задачи минимизации расхода энергии сети предполагают использование простых алгоритмов оценки местоположения цели в конкретный момент времени с помощью измерений спектра в нескольких (четырех и более) узлах. Например, использование алгоритмов, основанных на оценке временной задержки сигнала, требует применения точной временной синхронизации узлов по времени и дорогого оборудования. Применение алгоритмов, основанных на использовании нейронных сетей, предполагает измерение уровня сигнала от всех доступных по уровню сигнала точек доступа, называемых опорными, создание математической модели позиционирования, обучение модели [14]. Поддержание работоспособности устройств на основе данного метода требует значительных затрат. Методы когерентной локализации, например, метод формирования луча [8], требуют допущений о плоской волне. Такие предположения часто нарушаются в сенсорных сетях: например, цели могут находиться довольно близко к узлам во время опроса. Альтернативные методы, которые устраняют такие требования, также могут быть использованы, но предполагают необходимость получения дополнительной статистической информации [13, 14]. Ряд алгоритмов классификации предполагает передачу данных о временных рядах от локальных узлов кластера к голов- ному больших объемов, что приводит к потреблению слишком большого количества энергии. Это делает их реализацию проблематичной. Известен алгоритм локализации цели, основанный на измерении уровня сигнала, излучаемого целью, и на предположении об экспоненциальном затухании уровня сигнала с увеличением расстояния от цели: yi(t) = s(t)/úçr(t) – riúçµ, где yi(t) – значение уровня сигнала, считываемое i-м датчиком; r(t) – неизвестные координаты цели с относительно известного репера; ri – координаты i-го датчика; s(t) – уровень сигнала цели; a – показатель степени затухания, который предполагается известным (или его можно оценить экспериментально [10]). Алгоритм сначала вычисляет соотношения yi(t)/yj(t) для всех пар датчиков, чтобы исключить неизвестную переменную s(t). Каждое соотношение определяет окружность, на которой может находиться r(t). В работе [10] доказано, что при отсутствии шума четыре и более окружности, определенные на показаниях четырех или более датчиков, пересекаются в одной точке. Для измерений с шумом для надежности могут использоваться более n – 1 показаний, а неизвестное местоположение цели r(t) определено методом наименьших квадратов:
где (x, y) – неизвестные координаты цели; oi,x, oi,y – координаты i-го узла; ri – радиус окружности, связанный с i-м соотношением. Например, на основе шести показаний датчиков можно построить семейство окружностей, внутри которых, возможно, находится цель. Три различные точки, в которых пересекают- ся три из шести окружностей, будут указывать на местоположение цели. Точность оценок положения зависит от точности, с которой могут быть измерены координаты узлов и показатель затухания. На основе выборки местоположения целей в различные моменты времени можно построить с использованием метода наименьших квадратов модель для прогнозирования будущих местоположений целей [6, 7]. Для одной движущейся цели достаточно точное отслеживание может быть достигнуто с помощью линейной или полиномиальной модели. При наличии нескольких целей отслеживания такой метод определения траектории движения целей может приводить к необходи- мости нахождения решения системы одновре- менных уравнений. В реальных условиях ре- шение проблемы локализации и отслеживания целей будут осложнять вариабельность константы затухания, зависимость уровня сигнала от направления движения и наложения сигналов от различных целей. Классификация целей Классификация целей основана на предположении, в основном выполняемым на практике, что сигнатуры объектов вторжения для разных классов довольно значительно различаются. Сигнатуры строятся на основе временных рядов измерений в пределах интервала между временем начала фиксации и ухода цели. Каждый узел пространственно-временной ячейки определяет тип цели, используя данные, фиксируемые собственными сенсорами. Это позволяет реализовать алгоритмы совместной классификации. Для повышения точности классификации измеренные пространственно-временные сигнатуры, соответствующие нескольким модальностям, таким как акустические и сейсмические, могут быть объединены для повышения эффективности. Однако этот прием вызывает значительную нагрузку на сеть, связанную с необходимостью передачи в головные узлы кластера данных временных рядов с используемыми модальностями от нескольких узлов ячейки. Рассмотрим алгоритмы классификации одним узлом, которые работают с сегментами временных рядов, связанными с обнаруженными событиями. Следует отметить, что изменчивость временных сигнатур для конкретного класса целей создает серьезную проблему при разработке классификатора. Тем не менее, эффект вращающихся механизмов (двигателя, шестерен, колес и т.д.), а также других периодических явлений, таких как воздействие протектора колес на дорогу, определяющих акустические и сейсмические сигнатуры, спектры временных рядов, следует считать признаками, несущими полезную информацию. Но для успешного определения типов целей требуется априорное знание характеристик сигнатур для различных классов целей. Сформулируем задачу классификации в общем виде. Классификация в машинном обучении – это отнесение объекта к одному из заранее определенных классов на основании данных его признаков, то есть классификатор сопоставляет каждый вектор x элементу ω Î Ω таким образом, чтобы вероятность неправиль- ной классификации (вероятность того, что метка классификатора отличается от истинной метки) была бы сведена к минимуму. Для достижения этой минимальной вероятности ошибок оптимальный классификатор решает правило вида: x имеет метку ωi, если p(ωi|x) > > p(ωj|x) для всех j ≠ i, ωi, ωj ∈ Ω. Практически оценку апостериорной вероятности p(*) получить довольно сложно. Вместо этого вводят дискриминантную функцию gi(x), для которой справедливо следующее неравенство: gi(x) > > gj(x) имеет место, если p(ωi|x) > p(ωj|x) для j ≠ i, и для всех x. Тогда минимальная ошибка классификации может быть получена по правилу: принять, что x имеет метку ωi, если gi(x) > gj(x) для j ≠ i. Минимальная вероятность неправильной классификации известна как ошибка Байеса, а классификатор минимальной ошибки – как классификатор Байеса, или классификатор максимальной апостериорной вероятности. Рассмотрим три классификатора, которые требуют минимальной вычислительной работы и по характеристикам приближаются к классификатору Байеса: классификатор k-ближайших соседей (k-Nearest Neighbors, kNN), классификатор максимального правдоподобия и классификатор машины опорных векторов (Support Vector Machines, SVM). Классификатор kNN. Это самый простой классификатор. Он использует набор объектов, для которых заранее определены классы или данные в виде набора прототипов {pk}. На этапе тестирования вычисляется расстояние между каждым тестовым вектором и каждым прототипом и определяются k векторов-прототипов, наиболее близких к тестовому вектору. Метки классов этих k-ближайших векторов-прототипов затем объединяются с использованием большинства голосов или какого-либо другого метода для определения метки класса тестового вектора. Когда k = 1, классификатор называется kNN. В [15] показано, что асимптотически (по числу обучающих векторов) вероятность неправильной классификации kNN приближается к удвоенной (оптимальной) ошибке Байеса. Следовательно, оценка эффективности этого классификатора может быть использована в качестве базовой для оценки производительности других классификаторов. По мере увеличения числа прототипов классификатор kNN начинает требовать для работы достаточно много памяти и вычислительной мощности. Классификатор максимального правдоподобия. Этот метод классификации с обучением позволяет не только разделять классы с различ- ными типами функций плотности распределе- ния признаков, но и минимизировать среднюю ошибку классификации. Предположим, что закон распределения обучающих векторов – это смесь гауссовских функций плотности распределения. Как показано в [15], для оценки неизвестных параметров q Î X можно использовать дискриминантную функцию вида
где qi = [mi1, ..., mip, Λi1, ..., Λip] – параметры средней и ковариационной матриц плотностей смеси P, соответствующих классу wi. Тогда классы целей могут быть идентифицированы путем применения алгоритма кластеризации, такого как алгоритм k-средних [15], к обучающим векторам. Дискриминантная функция вычисляется как gi(x) = Gi(x|θi)p(wi), где априорная вероятность p(wi) аппроксимируется относительным числом обучающих векторов в классе i. Классификатор SVM. Основная идея метода заключается в построении гиперплоскости, разделяющей объекты выборки оптимальным способом [16]. Алгоритм работает в предположении, что, чем больше расстояние (зазор) между разделяющей гиперплоскостью и объектами разделяемых классов, тем меньше средняя ошибка классификатора. Его идею без потери общности можно проиллюстрировать на примере бинарной классификации. Пусть Результаты Отработка алгоритмов управления процессами в реагирующей сети осуществлялась на имитационной модели. Моделирование проводилось при отсутствии возмущающих факторов. Зона с размещенными узлами задавалась как прямоугольник размером 200 ´ 100 м. Число размещенных сенсорных узлов варьировалось от 700 до 900 для получения различных значений коэффициента перекрытия в сети. Дальность связи принималась равной 30 м. Скорость движения объекта проникновения изменялась от 10 до 30 м/сек. Моделирование показало увеличение «времени жизни» сети в среднем на 25,1 % методами и алгоритмами протокола LEACH. Введение в модель таких факторов, как неопределенность результатов измерений во времени и пространстве, влияние доплеровских эффектов, обусловленных движением, изменчивость условий среды, показало необходимость усложнения алгоритмов для повышения степени успешности их работы. Так, введение помех в сигналы, генерируемые объектом проникновения, существенно изменяет воспринимаемые сигнатуры. В реальных условиях такие помехи возникают из-за переключения передач, ускорения или за счет доплеровских эффектов и могут привести к значительному изменению спектра и уровня воспринимаемого сигнала. Практика показала, что доплеровские эффекты в акустических и сейсмических сигналах особенно значительны из-за низкой скорости распространения волн. Это приводило к ошибкам классификации при использовании сигнатур, полученных на фазе обучения. Испытания показали, что использование алгоритма SVM наиболее предпочтительно, однако обеспечение робастности классификатора, напри- мер, за счет простых схем адаптации, хотя и су- щественно увеличивает успешность их применения, является сложной задачей в условиях жестких ограничений по вычислительным возможностям узлов. Точность алгоритма локализации цели и соответствующих алгоритмов оценки пеленга цели существенно зависит от точности информации о времени и местоположении цели. Ошибки в локализации узлов в таких случаях могут привести к ошибкам в направлении и скорости движения цели, а значит, в определении ее будущего местоположения. Часть ошибок можно устранить путем усреднения сигнала внутри пространственных ячеек и тем самым повысить точность этих оценок. Введение помех в оценки местоположения объекта проникновения приводило к зацикливанию алгоритма построения трека цели, что потребовало усложнения алгоритма отслеживания и дополнительных вычислительных затрат. Исследования показали достаточно сильную зависимость воспринимаемой сигнатуры узлом от его расстояния от источника помех и сигнала. Оказалось, что допущение о достаточно хорошей согласованности характеристик воспринимаемых сигналов об одной и той же цели конкретного класса целей, полученных при различных событиях, не выполняется. Например, узлы, расположенные ближе к источнику помех, значительно сильнее подвержены доплеровским эффектам, чем более удаленные узлы. Это приводило к различиям в спектральных сигнатурах для одного и того же транспортного средства в разных точках защищаемой зоны. Введение подтипа внутри класса, то есть большего количества измерений и представления сигнала с достаточно высокой размерностью, позволило повысить надежность классификации, но увеличило энергозатраты. Отметим, что в работе [12] описан подход для выявления и оценки влияния доплеровских эффектов. Полученные результаты позволяют включить в модель влияние доплеровских эффектов на сигнатуру цели для m-го класса как реализацию стационарного процесса с нулевым средним значением, модулируемого изменяющейся во времени мгновенной частотой f(qm) с параметризованным вектором qm = [am vm dm]. Тогда классификатор осуществляет операции следующим образом: сначала для каждой гипотезы получают оценку ML доплеровских параметров Следует ожидать, что распределенная форма обработки сигналов и данных в задачах обнаружения, локализации и классификации, учет влияния множества факторов могут снижать эффективность и результативность работы алгоритмов в сети. Это предполагает поиск компромисса между эффективностью и сложностью реализации и переноса акцента на взаимодействие (кооперацию) между узлами за счет обмена информацией между ними. Установка на узлах сенсоров, воспринимающих различные модальности от цели, позволяет агрегировать данные по различным способам измерения на каждом узле, что не требует связи по сети. Результат может использоваться для определения типа цели. Параллельная работа нескольких алгоритмов классификации также может повысить робастность классификации. Заключение В статье представлены соображения, которые можно положить в основу разработки системы отслеживания нескольких целей средствами сенсорной сети. Основные компоненты системы включают обнаружение событий, оценку, прогнозирование местоположения и классификацию целей. На примере отслеживания одной цели и измерениях акустического или сейсмического сигналов от цели такая задача может быть решена. Определение типа и отслеживание нескольких целей одновременно требуют развития простых алгоритмов классификации. Спектры уровней сигналов от целей могут быть использованы для достаточно точного определения типа цели. Влияние ряда факторов, включая доплеровские эффекты, приводит к значительному искажению спектров сигналов, что создает серьезную проблему при определении типа цели. Это предполагает формирование базы сигнатур для классификации, например, колесных и гусеничных транспортных средств, и сравнение на этой ос- нове эффективности алгоритмов классификации. Алгоритмы, описанные в статье, представляют собой только один из подходов решения сложной проблемы отслеживания нескольких целей беспроводной сетью датчиков. В заключение следует отметить, что распределенные БСС превращаются в мощную технологию для дистанционного управления и мониторинга в различных предметных областях. Литература 1. Бородин А.С., Волков А.Н., Мутханна А.С.А., Кучерявый А.Е. Искусственный интеллект в сетях связи пятого и последующих поколений // Электросвязь. 2021. № 1. С. 17–22. DOI: 10.34832/ELSV.2021.14.1.001. 2. Shit R.C., Sharma S., Puthal D. Ubiquitous localization (UbiLoc): A survey and taxonomy on device free localization for smart world. IEEE Communications Surveys and Tutorials, 2019, vol. 21, no. 4, pp. 3532–3564. DOI: 10.1109/COMST.2019.2915923. 3. Hsua J.M., Chenb C.C., Li C.C. POOT: An efficient object tracking strategy based on short-term optimistic predictions for face-structured sensor networks. Computers and Mathematics with Applications, 2012, vol. 63, no. 2, pp. 391–406. DOI: 10.1016/j.camwa.2011.07.034. 4. Mikusz M. Towards an understanding of cyber-physical systems as industrial software-product-service systems. Proc. CIRP, 2014, vol. 16, pp. 385–389. DOI: 10.1016/J.PROCIR.2014.02.025. 5. Shit R.C., Sharma S., Puthal D., Zomaya A.Y. Location of things (LoT): A review and taxonomy of sensors localization in IoT infrastructure. IEEE Communications Surveys and Tutorials, 2018, vol. 20, no. 3, pp. 2028–2061. DOI: 10.1109/COMST.2018.2798591. 6. Iyengar S.S., Brooks R.R. Distributed Sensor Networks. Image and Sensor Signal Processing. Chapman and Hall/CRC Publ., 2012, 764 p. DOI: 10.1201/b12991. 7. Виноградов Г.П., Емцев А.С., Федотов И.С. Беспроводные сенсорные сети в защищаемых зонах // Изв. ЮФУ. Технические науки. 2021. № 1. С. 19–30. DOI: 10.18522/2311-3103-2021-1-19-30. 8. Suryadevara N.K., Mukhopadhyay S.C., Kelly S.D.T., Gill S.P.S. WSN-based smart sensors and actuator for power management in intelligent buildings. IEEE/ASME Transactions on Mechatronics, 2015, vol. 20, no. 2, pp. 564–571. DOI: 10.1109/TMECH.2014.2301716. 9. Богуренко П.А., Бурлаков М.Е. Обзор методов локального позиционирования объектов в Wi-Fi сетях // Вестн. ПНИПУ. Электротехника, информационные технологии, системы управления. 2017. № 3. С. 146–158. 10. Рева И.А., Богданов А.А., Малахова Е.А. Применение точек доступа WI-Fi для регистрации движения на объекте // Научный вестн. НГТУ. 2017. № 3. C. 104–125. DOI: 10.17212/1814-1196-2017-3-104-125. 11. Li D., Wong K.D., Hu Y.H., Sayeed A.M. Detection, classification and tracking of targets in distributed sensor networks. IEEE Signal Processing Magazine, 2002, vol. 19, no. 2, pp. 17–29. DOI: 10.1109/79.985674. 12. Toor A.S. Jain A.K. A survey on wireless network simulators. BEEI, 2017, vol. 6, no. 1, pp. 62–69. DOI: 10.11591/eei.v6i1.568. 13. Rodriguez-Zurrunero R., Utrilla R., Rozas A., Araujo A. Process management in IoT operating systems: cross-influence between processing and communication tasks in end-devices. Sensors, 2019, vol. 19, no. 4, p. 805. DOI: 10.3390/s19040805. 14. Lee E.A., Seshia S.A. Introduction to Embedded Systems. A Cyber-Physical Systems Approach, 2015, 566 p. 15. Виноградов Г.П., Мальков А.А. Модели поиска структур данных на основе конкуренции и кооперации // УБС. 2008. № 22. С. 98–110. 16. Xu Y., Winter J., Lee W.-C. Prediction-based strategies for energy saving in object tracking sensor networks. Proc. IEEE Int. Conf. on Mobile Data Management, 2004, pp. 346–357. DOI: 10.1109/ MDM.2004.1263084. References
|
| Постоянный адрес статьи: http://swsys.ru/index.php?id=4899&like=1&page=article |
Версия для печати |
| Статья опубликована в выпуске журнала № 2 за 2022 год. [ на стр. 229-239 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Кластеризация документов интеллектуального проектного репозитария на основе FCM-метода
- Реализация программных средств для классификации данных на основе аппарата сверточных нейронных сетей и прецедентного подхода
- Грамматика запросов для хранилища разнородных данных в проактивных системах
- Инструментальная система для решения задач многокритериального выбора
- Применение метода анализа однородности для визуализации и анализа данных библиометрии и наукометрии
Назад, к списку статей