Метод испытания радиолокационных станций с использованием беспилотного летательного аппарата и бортового оборудования
| Калабин А.Л. (alex.ka.86@gmail.com) - Тверской государственный технический университет, г. Тверь, Россия, доктор физико-математических наук, Морозов А.К. (yerdnavozorom@gmail.com) - Тверской государственный технический университет (аспирант), Тверь, Россия | |
| Ключевые слова: программная модель, компьютерное моделирование, имитирование радиолокационной цели, беспилотный летательный аппарат, тестирование радиолокатора |
|
| Keywords: software model, computer modeling, imitation of a radar target, unmanned aerial vehicle, radar testing |
|
|
|
|
Для испытания и подтверждения характеристик радиолокаторов часто используются испытательные стенды [1–3]. Они позволяют при приемлемых затратах ресурсов получать необходимую информацию об изделии [4, 5]. Например, при испытании датчиков автомобилей используются тестовые камеры с имитаторами, взаимодействующими с оборудованием автомобиля [2]. Требуемое воздействие на датчики определяется моделируемой дорожной ситуацией. Задача стенда – сформировать условия функционирования, приближенные к реальным для испытываемого изделия, путем генерации тестовых сигналов. Подобным образом можно проводить испытания для наземных радиолокационных станций (РЛС). При испытании отдельно только приемников РЛС тестовые сигналы формиру- ются на основе математической модели, учи- тывающей основные факторы [6]. Но есть факторы, для учета которых требуются значительные вычислительные мощности, например, отражения от земли, особенности рельефа, влияние погодных условий, электромагнитная обстановка в точке развертывания и другие. Поэтому для испытания наземных импульсных РЛС аппаратуру имитирования сигнала целей предлагается размещать на беспилотном летательном аппарате (БПЛА). В таком случае сигнал, излучаемый с борта носителя, принимается антенной РЛС с влиянием всех присутствующих факторов.
Угловые координаты моделируемой цели определяются положением носителя: αмц = αн, φмц = φн, (1) где αмц – азимут моделируемой цели; φмц – угол места моделируемой цели; αн – азимут носителя; φн – угол места носителя. Дальность имитируемой цели складывается из расстояния проведения измерений и дальности, которую добавляет бортовое оборудование. Применительно к ситуации, представленной на рисунке 1, дальность имитируемой цели рассчитывается следующим образом [7]:
где rмц – дальность моделируемой цели; rмцmin – минимально возможная дальность моделируемой цели; tзг – время задержки, формируемое бортовым генератором; c – скорость света. Минимально возможная дальность моделируемой цели складывается из текущего расстояния, на котором находится носитель с бортовым оборудованием, а также паузы, которую вносят вычислитель и схема синхронизации бортового оборудования с излучателем РЛС, и рассчитывается по формуле
где rн – текущее удаление носителя от РЛС; tп – пауза, вносимая запаздыванием сигнала синхронизации и работой вычислителя. Таким образом, из выражений (2, 3) следует, что контроль дальности имитируемой цели можно осуществлять, добавляя время задержки для импульса, излучаемого бортовым генератором:
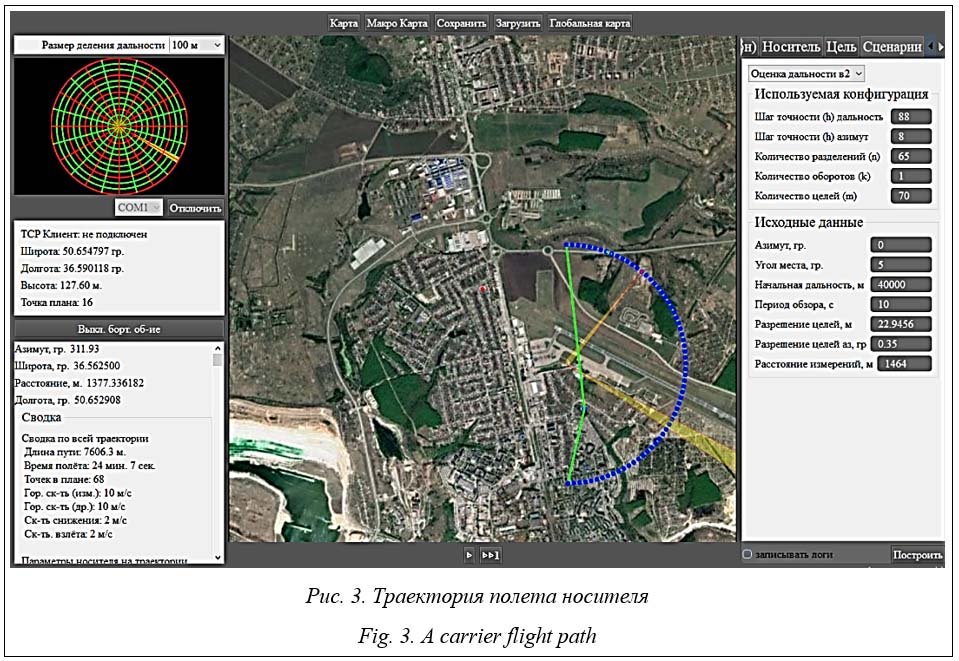
В процессе испытаний носитель останавливается в заданной точке траектории и ждет прохождения луча РЛС на этих координатах, затем перемещается в следующее положение и опять ожидает. Таким способом носитель переме- щается во все указанные точки траектории. Во время полета бортовое оборудование излучает сигнал, количество импульсов в котором соответствует требуемому количеству моделируемых целей, а время задержки каждого импульса требуемой дальности. По окончании испытаний на РЛС формируется файл с указанием координат обнаруженных целей, а оборудование носителя фиксирует в файл ожидаемые координаты моделируемых целей. Далее эти два файла сопоставляются и определяется адекватность функционирования РЛС. Было выполнено компьютерное моделирование с использованием разработанного приложения для планирования испытаний описываемым методом.
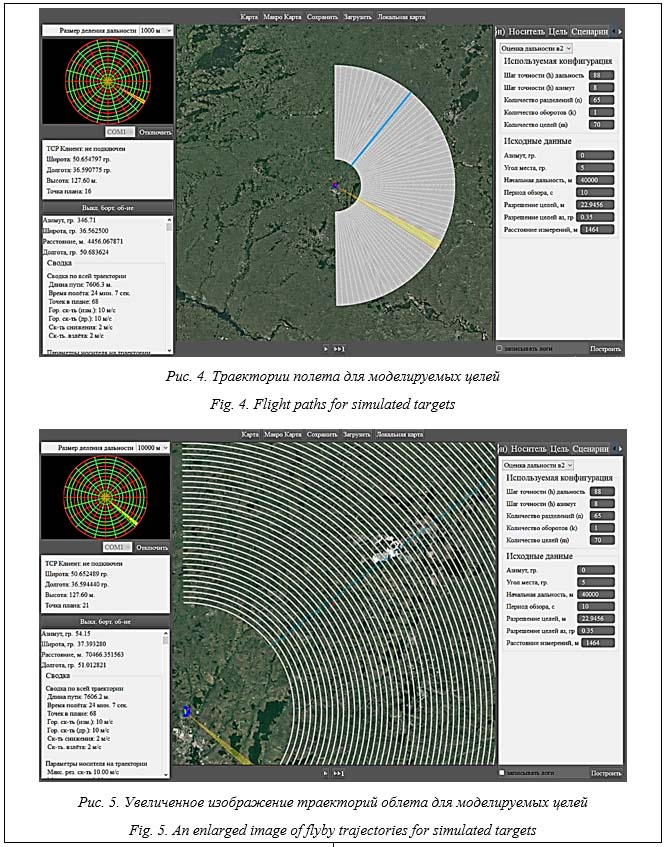
На рисунке 4 изображены траектории моделируемых целей. Они, как и траектория носителя, являются дугами окружности, но с гораздо большим радиусом – от 40 до 180 км с шагом 2 км. Дальность целей во время испытаний будет определяться временем задержки излучаемых импульсов, а в приложении отображаются ожидаемые траектории целей.
Ожидается, что при использовании БПЛА с программируемым генератором и приведенными траекториями облета можно измерить некоторые функциональные характеристики РЛС. Например, максимальную дальность обнаружения, разрешающую способность по дальности, ошибку определения азимута, угла места, дальности. Для оценки возможностей метода было выполнено моделирование для программной модели РЛС. Цель его – определение характеристик программной модели РЛС предлагаемым методом. В таблице приведены результаты моделирования. Характеристики программной модели РЛС, полученные после обработки данных моделирования Characteristics of the radar software model obtained after processing simulation data
По полученным результатам можно сделать вывод, что измеренные показатели достаточно близки к заданным. Это свидетельствует о це- лесообразности применения указанного метода для определения характеристик РЛС. Возможно измерение и других характеристик, например, разрешающая способность по дальности, по угловым координатам, точность определения координат. Литература 1. Chan C.C., Kurnia F.G., Al-Hournani A. et al. Open-source and low-cost test bed for automated 5G channel measurement in mmWave band. J. Infrared Milli Terahz Waves, 2019, vol. 40, no. 5, pp. 535–556. DOI: 10.1007/S10762-019-00587-Z. 2. Gadringer M.E., Schreiber H., Gruber A. et al. Virtual reality for automotive radars. e & i Elektrotechnik und Informationstechnik, 2018, vol. 135, no. 4-5, pp. 335–343. DOI: 10.1007/s00502-018-0620-9. 3. Vorderderfler M., Gadringer M.E., Schreiber H. et al. Frequency dividers in radar target stimulator applications. e & i Elektrotechnik und Informationstechnik, 2018, vol. 135, no. 4-5, pp. 344–351. DOI: 10.1007/s00502-018-0626-3. 4. Jarrar A., Balouki Y. Formal modeling of a complex adaptive air traffic control system. Complex Adaptive Systems Modeling, 2018, vol. 6, no. 1, art. 6. DOI: 10.1186/s40294-018-0056-4. 5. Merkulov V.I., Sadovskii P.A. Estimation of the range and its derivatives in an active two-position radar system. J. of Communications Technology and Electronics, 2018, vol. 63, no. 4, pp. 346–353. DOI: 10.1134/S1064226918040083. 6. Costanzo S., Spadafora F., Borgia A., Moreno O.H., Costanzo A., Di Massa G. High resolution software defined radar system for target detection. In: Advances in Intelligent Systems and Computing, 2013, vol. 206, pp. 997–1005. DOI: 10.1007/978-3-642-36981-0_94. 7. Сколник М. Справочник по радиолокации. Ч. 1. М.: Техносфера, 2014. 672 с. References
| |||||||||||||||||||||||


http://swsys.ru/index.php?id=4924&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Компьютерное моделирование эксперимента по имитации наличия целей для радиолокационной станции
- Модель ускорителя идеальных частиц
- Концепция математического и компьютерного моделирования тепловых процессов в электронных системах
- Компьютерное моделирование для интеллектуальной оценки динамического взаимодействия твердых тел
- Программно-аппаратный комплекс для исследования, проектирования и управления процессом переработки пластических масс