Применение искусственных нейронных сетей в системах автоматического управления магнитной левитацией
| Коробейников А.Г. (korobeynikov_a_g@mail.ru) - Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики (Университет ИТМО) (профессор), Санкт-Петербург, Россия, доктор технических наук | |
| Ключевые слова: искусственные нейронные сети, lstm, narx, машинное обучение, сау, магнитная левитация, matlab |
|
| Keywords: artificial neural networks, lstm, narx, machine learning, acs, magnetic levitation, matlab |
|
|
|
|
Сложности, возникающие при описании некоторых задач в виде аналитических математических моделей и при их решении, вызвали практический и теоретический интерес в предметной области, связанной с развитием ме- тодов и систем, которые взаимосвязаны с разными особенностями, возникающими при использовании методов искусственного интеллекта. К ним относят системы нечеткой логики, экспертных оценок, искусственных нейронных сетей (ИНС) и/или их интеграции [1, 2]. Возникающие в этих предметных областях задачи имеют ряд свойств, определяющих сложность их решения, таких как нелинейность математических моделей, неполнота знаний в протекающих процессах, сложность прогнозирования и ситуационного управления, случайный характер внешних воздействий. При проектировании систем автоматического управления (САУ) сложными техническими динамическими объектами (СТДО) используют хорошо зарекомендовавший себя мощный математический аппарат на базе ИНС. Нейроуправление СТДО является одним из перспективных направлений, развивающихся на стыке теорий САУ и искусственного интеллекта. По сравнению с классическими методами, применяемыми при разработке САУ СТДО, можно выделить следующие уникальные для используемых ИНС преимущества: - проведение параллельных вычислений; - нахождение ранее неизвестных взаимосвязей между входными и выходными последовательностями цифровых сигналов; - обеспечение более эффективного управления нелинейными системами за счет применения нелинейных функций активации. Такие преимущества вызывают большой научный интерес к постановке задач, связан- ных с практическим применением нейроконтроллеров в САУ СТДО. Тем не менее необходимо отметить и основные недостатки ИНС: - при обучении ИНС необходимо учитывать эффект переобучения, который может привести к нежелательному результату; - применение немасштабированных данных на входе ИНС достаточно часто вызывает эффект насыщения, что приводит к нечувствительности ИНС; - при использовании большого количества переменных ИНС, как правило, возникает эффект «проклятия размерности». Однако правильный учет этих недостатков даст возможность успешно решить поставленную задачу. Данная работа базируется на подражающем нейроуправлении [3–5]. Основная идея такого управления заключается в обучении нейроконтроллера на примере динамики обычного контроллера с обратной связью, а в качестве обучающей выборки берутся значения на входе и выходе контроллера. Выход является ожидаемой реакцией нейроконтроллера. Для оценки вектора состояния СТДО будут использованы ИНС модели нелинейной авторегрессии с экзогенными входами NARX (Nonlinear Autoregressive with Exogenous Inputs) и модели с долгой краткосрочной памятью LSTM (Long Short-Term Memory) [6, 7]. ИНС LSTM – разновидность архитектуры рекуррентных ИНС, предложенная в 1997 г. З. Хохрайтером и Ю. Шмидхубером [6]. Выбор для исследования LSTM-сети обусловлен ее способностью хорошо прогнозировать временные ряды в ситуациях разделения их значений временными лагами с точно неизвестной продолжительностью ключевых событий. ИНС NARX тоже имеет архитектуру рекуррентных ИНС, называемых также динамическими моделями NARX [7]. Эти модели хорошо зарекомендовали себя при моделировании нелинейных систем. Кроме того, одним из основных приложений применения моделей NARX являются различные САУ. Анализ использования сетей NARX показывает, что наибольший эффект достигается в случаях, когда имеется зависимость прогнозируемых результатов от входных данных, существующих в предыдущие моменты времени [8]. В качестве объекта управления выбрана система магнитной левитации, являющаяся СТДО. Выбор обусловлен мировым трендом развития транспортных технологий [9–10]. Вы- числительные эксперименты были проведены под управлением Windows 11 при помощи системы MATLAB, позволяющей решать задачи в различных предметных областях [11–13]. Постановка задачи Целью данной работы является анализ результатов на предмет эффективности использования вышеназванных ИНС для случая САУ левитирующим телом, математическая модель которого имеет следующий вид [14]: где x1(t) – ток; x2(t) – вертикальное расстояние от центра левитирующего тела до подложки; x3(t) – вертикальная скорость левитирующего тела; u(t) – управление; t – время; g – ускорение свободного падения; kD – коэффициент демпфирования; m – масса левитирующего тела; km – постоянный коэффициент, зависящий от параметров катушки; L и R – соответственно индуктивность и сопротивление катушки.
На этих данных необходимо произвести обучение ИНС NARX и LSTM, а затем сравнить результаты. Создание, обучение и результаты применения обученных нейронных сетей Сначала создадим и обучим ИНС LSTM с числом скрытых слоев, равным 50 и 100. Кроме этого, зададим величины для прогноза и учета предыдущих значений. В системе MATLAB это можно сделать, например, при помощи следующих операторов: my_Maglev_numFeatures = 1; my_Maglev_numResponses = 1; my_Maglev_numHiddenUnits = 50; %100 my_Maglev_layers = [ ... sequenceInputLayer(my_Maglev_numFeatures) lstmLayer(my_Maglev_numHiddenUnits) fullyConnectedLayer(my_Maglev_numResponses) regressionLayer];
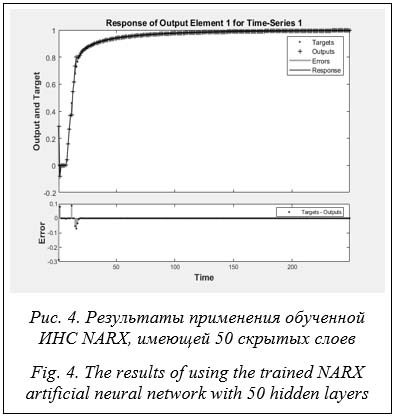
Результаты моделирования показали, что при numHiddenUnits = 100 сеть обучается лучше. Для этих данных обученная ИНС LSTM на тестовых данных выдает среднеквадратичную ошибку RSME = 0.0597, для numHiddenUnits = 50, RSME = 0.0728. Теперь создадим и обучим ИНС NARX с числом скрытых слоев, равным 50 (100). В си- стеме MATLAB это можно сделать, например, при помощи следующих операторов: my_MagLev_net = narxnet(1:5,1:5, my_Maglev_numHiddenUnits); [my_MagLev_net,my_MagLev_tr]=train(my_MagLev_net,my_MagLev_Xs,my_MagLev_Ts,… my_MagLev_Xi,my_MagLev_Ai); Структура ИНС NARX с 50 скрытыми слоями и результаты обучения этой ИНС представлены на рисунке 3.
В ходе проведения компьютерного моделирования получены следующие результаты: для ИНС LSTM при количестве скрытых слоев 50 RSME равно 7.28e-02, при 100 – 5.97e-02, для ИНС NARX при количестве слоев 50 RSME равно 4.2559e-04, при 100 – 5.6e-03. Выводы Анализ представленных результатов показал, что ИНС NARX лучше подходит для САУ магнитной левитации. Кроме того, величина среднеквадратичной ошибки и время обучения для ИНС NARX с 50 скрытыми слоями меньше, чем у ИНС NARX, имеющей 100 скрытых слоев. Поэтому рекомендуется выбирать для рассмотренной задачи ИНС NARX с 50 скрытыми слоями. В заключение следует отметить, что в данной работе решалась конкретная задача, связанная с нейроуправлением. В общем же случае существует множество нерешенных в этой области задач, например, отсутствие универсальной процедуры анализа устойчивости нелинейных нейроконтроллеров. Известны лишь частные решения для некоторых видов нейроконтроллеров, причем с известной математической моделью объекта управления. Таким образом, можно сделать вывод об актуальности исследований в данной области. Литература 1. Мунтян Е.Р. Использование нечетких GH-моделей для представления сложных технических систем // Информатизация и связь. 2021. № 3. С. 55–60. DOI: 10.34219/2078-8320-2021-12-3-55-60. 2. Колоденкова А.Е., Верещагина С.С., Мунтян Е.Р. Разработка единой интеллектуальной системы поддержки принятия решений для диагностирования электротехнического оборудования промышленности // Сб. тр. XIII ВСПУ. 2019. С. 1874–1878. 3. Zhang Y., Wang J. Recurrent neural networks for nonlinear output regulation. Automatica, 2001, vol. 37, no. 8, pp. 1161–1173. DOI: 10.1016/S0005-1098(01)00092-9. 4. Omidvar O., Elliott D.L. Neural Systems for Control. NY, Academic Press Publ., 1997, 358 p. DOI: 10.1016/b978-0-12-526430-3.x5000-4. 5. Sigeru O., Marzuki K., Rubiyah Y. Neuro-control and its Applications. Springer Publ., 1996, 255 p. DOI: 10.1007/978-1-4471-3058-1. 6. Hochreiter S., Schmidhuber J. Long short-term memory. Neural Computation, 1997, vol. 9, no. 8, pp. 1735–1780. DOI: 10.1162/neco.1997.9.8.1735. 7. Diaconescu E. The use of NARX neural networks to predict chaotic time series. WSEAS Trans. Comp. Research, 2008, vol. 3, no. 3, pp. 182–191. 8. Boussaada Z., Curea O., Remaci A., Camblong H., Bellaaj N.M. A nonlinear autoregressive exogenous (NARX) neural network model for the prediction of the daily direct solar radiation. Energies, 2018, vol. 11, no. 3, art. 620. DOI: 10.3390/en11030620. 9. Зайцев А.А., Соколова Я.В., Фиронов А.Н. Магнитная левитация – мировой тренд транспортных технологий // Железнодорожный транспорт. 2019. № 3. С. 54–58. 10. Лапидус Б.М., Мачерет Д.А. Перспективная топология высокоскоростной транспортной системы с использованием вакуумно-левитационных технологий // Транспорт Российской Федерации. 2018. № 1. С. 15–21. 11. Korobeynikov A.G., Grishentsev A.Y., Velichko E.N., Aleksanin S.A. et al. Calculation of regularization parameter in the problem of blur removal in digital image. Optical Memory and Neural Networks, 2016, vol. 25, no. 3, pp. 184–191. DOI: 10.3103/S1060992X16030036. 12. Коробейников А.Г., Кутузов И.М. Алгоритм обфускации // Кибернетика и программирование. 2013. № 3. С. 1–8. DOI: 10.7256/2306-4196.2013.3.9356. 13. Korobeynikov A.G., Fedosovsky M.E., Zharinov I.O., Shukalov A.V., Gurjanov A.V. Development of conceptual modeling method to solve the tasks of computer-aided design of difficult technical complexes on the basis of category theory. Int. J. of Applied Engineering Research, 2017, vol. 12, no. 6, pp. 1114–1122. 14. Коробейников А.Г. Проектирование математической модели системы автоматического управления магнитной левитации // Междунар. журнал гуманитарных и естественных наук. 2021. № 12-2. C. 15–26. 15. Rubio J.d.J. Stability analysis of the modified Levenberg–Marquardt algorithm for the artificial neural network training. IEEE Transactions on Neural Networks and Learning Systems, 2021, vol. 32, no. 8, pp. 3510–3524. DOI: 10.1109/TNNLS.2020.3015200. References 1. Muntyan E.R. Using fuzzy GH-models to represent the complex technical systems. Informatization and Communication, 2021, no. 3, pp. 55–60. DOI: 10.34219/2078-8320-2021-12-3-55-60 (in Russ.). 2. Kolodenkova A.E., Vereshchagina S.S., Muntyan E.R. Development of a unified intelligent decision support system for diagnosing electrical equipment in the industry. Proc. XIII All-Russ. Conf. on Management Problems, 2019, рр. 1874–1878 (in Russ.). 3. Zhang Y., Wang J. Recurrent neural networks for nonlinear output regulation. Automatica, 2001, vol. 37, no. 8, pp. 1161–1173. DOI: 10.1016/S0005-1098(01)00092-9. 4. Omidvar O., Elliott D.L. Neural Systems for Control. NY, Academic Press Publ., 1997, 358 p. DOI: 10.1016/b978-0-12-526430-3.x5000-4. 5. Sigeru O., Marzuki K., Rubiyah Y. Neuro-control and its Applications. Springer Publ., 1996, 255 p. DOI: 10.1007/978-1-4471-3058-1. 6. Hochreiter S., Schmidhuber J. Long short-term memory. Neural Computation, 1997, vol. 9, no. 8, pp. 1735–1780. DOI: 10.1162/neco.1997.9.8.1735. 7. Diaconescu E. The use of NARX neural networks to predict chaotic time series. WSEAS Trans. Comp. Research, 2008, vol. 3, no. 3, pp. 182–191. 8. Boussaada Z., Curea O., Remaci A., Camblong H., Bellaaj N.M. A nonlinear autoregressive exogenous (NARX) neural network model for the prediction of the daily direct solar radiation. Energies, 2018, vol. 11, no. 3, art. 620. DOI: 10.3390/en11030620. 9. Zaitsev A.A., Sokolova Ya.V., Fironov A.N. Magnetic levitation as a global trend in transport technologies. Railway Transport, 2019, no. 3, pp. 54–58 (in Russ.). 10. Lapidus B.M., Macheret D.A. Perspective topology of a high-speed transport system using vacuum levitation technologies. Transport of the Russian Federation, 2018, no. 1, pp. 15–21 (in Russ.). 11. Korobeynikov A.G., Grishentsev A.Y., Velichko E.N., Aleksanin S.A. et al. Calculation of regularization parameter in the problem of blur removal in digital image. Optical Memory and Neural Networks, 2016, vol. 25, no. 3, pp. 184–191. DOI: 10.3103/S1060992X16030036. 12. Korobeinikov A.G., Kutuzov I.M. Obfuscation algorithm. Cybernetics and Programming, 2013, no. 3, pp. 1–8. DOI: 10.7256/2306-4196.2013.3.9356 (in Russ.). 13. Korobeynikov A.G., Fedosovsky M.E., Zharinov I.O., Shukalov A.V., Gurjanov A.V. Development of conceptual modeling method to solve the tasks of computer-aided design of difficult technical complexes on the basis of category theory. Int. J. of Applied Engineering Research, 2017, vol. 12, no. 6, pp. 1114–1122. 14. Korobeynikov A.G. Designing a mathematical model of a magnetic levitation automatic control system. Int. J. of Humanities and Natural Sciences, 2021, no. 12-2, pp. 15–26 (in Russ.). 15. Rubio J.d.J. Stability analysis of the modified Levenberg–Marquardt algorithm for the artificial neural network training. IEEE Transactions on Neural Networks and Learning Systems, 2021, vol. 32, no. 8, pp. 3510–3524. DOI: 10.1109/TNNLS.2020.3015200. |
 ,
,


http://swsys.ru/index.php?id=4926&lang=%E2%8C%A9%3Den&like=1&page=article |
|
Perhaps, you might be interested in the following articles of similar topics:
- Метод идентификации технического состояния радиотехнических средств с применением технологий искусственных нейронных сетей
- Конструктивный метод обучения искусственных нейронных сетей со взвешенными коэффициентами
- Разработка модели имитации значений технологических параметров гидроагрегата для тренажера оперативного персонала
- Методы автоматической классификации текстов
- Применение средств моделирования нейросетей для анализа предаварийных ситуаций на буровых