Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Прогнозирование номера образа по текущим характеристикам объекта
Аннотация:
Abstract:
| Авторы: Дли М.И. (midli@mail.ru) - Филиал Московского энергетического института (технического университета) в г. Смоленске (профессор, зам. директора по научной работе), г. Смоленск, Россия, доктор технических наук, Гимаров В.А. (feu@sci.smolensk.ru) - Смоленский филиал Московского энергетического института (технического университета), г. Смоленск, Россия, доктор экономических наук | |
| Ключевое слово: |
|
| Ключевое слово: |
|
| Количество просмотров: 11074 |
Версия для печати Выпуск в формате PDF (1.36Мб) |
Пусть для каждого объекта a из генеральной совокупности A можно измерить набор его количественных характеристик x(tj)=[x1(tj), x2(tj),…, xn(tj)]T (здесь T – символ транспонирования) в последовательные моменты времени t1, t2,…, tj,…, tN. Предполагается, что в момент времени tN может быть определен номер образа Y(a)=y, который имеет рассматриваемый объект; yÎDy, Dy={1,2,…,r,…S}, S – число образов (классов). Задача состоит в том, чтобы дать прогноз номера образа
По-видимому, впервые задача прогнозирования номера образа по текущим характеристикам объекта сформулирована в монографии [1], где был предложен один из возможных подходов к ее решению, не налагающий, вообще говоря, каких-либо ограничений на условия проведения эксперимента. Обсудим возможные ограничения и методы решения исследуемой задачи. Очевидно, в самом "жестком" ее варианте необходимо исходить из следующих допущений: 1) число имеющихся наблюдений M невелико, например, M£10; 2) какая-либо информация о вероятностных характеристиках векторов x(tj) отсутствует; 3) номер образа в момент времени tN по вектору признаков x(tN) определяется без ошибки; 4) решающее правило формируется на основании некоторой априорной информации и в простейшем случае (при наличии только двух образов 1 и 2 (S=2)) записывается в виде
где G(x)=0 – уравнение линии (поверхности), разделяющей объекты двух классов; d – неотрицательная константа, задающая область неопределенности принятия решения (данная константа, вообще говоря, может быть принята равной нулю). При наличии приведенных ограничений рассматриваемая задача сводится к задаче прогнозирования векторного, в общем случае нестационарного стохастического процесса, решение которой при наличии условий 1 и 2 может осуществляться ограниченным числом методов: а) трендовым – с применением временных полиномов [2,3]; б) с использованием модели многомерной (векторной) авторегрессии [3-6]; в) с использованием аппарата искусственных нейронных сетей (см., например, [7]). В первом методе предполагается аппроксимация (трендовая модель)
где f(t) – m-мерный вектор базисных функций времени, например, вида f(t) = (1, t, t2,…, tm-1)T, (3) C – матрица размера n´m коэффициентов модели. Элементы данной матрицы определяются по имеющимся экспериментальным данным методом наименьших квадратов (МНК), причем, как будет показано ниже, для нахождения этих n´m элементов достаточно иметь m наблюдений x(t1), x(t2),…, x(tm) при известных t1¸tm. Отметим, что в условиях рассматриваемой задачи вряд ли целесообразно применять для прогнозирования временной полином степени выше второй-третьей, поэтому этот метод является достаточно экономичным в плане требуемой для его реализации экспериментальной информации. Прогноз с использованием модели многомерной авторегрессии применяется, как правило, при дополнительном ограничении tj+1-tj=T=const, (4) то есть при эквидистантном расположении моментов времени (здесь T – интервал или такт дискретизации). Прогноз на один такт рассчитывается по формуле
где в данном случае m – порядок модели; xj=x(tj); вектор c0 (размера n´1) и матрицы C1¸Cm (размера n´n) содержат коэффициенты модели. Как можно показать, для оценивания коэффициентов приведенной модели нужно иметь не менее 1+n×m наблюдений вектора x(tj), то есть эта модель является, вообще говоря, менее экономичной, чем предыдущая. Но основной особенностью такой модели (в данном случае это – недостаток) является то, что она может адекватно отображать (и, соответственно, прогнозировать) только стационарные стохастические процессы. Использование нейросетевого подхода требует, прежде всего, наличие экспериментальных данных, представленных в форме таблицы обучающей выборки вида таблицы 1. Таблица 1 Данные обучающей выборки
Здесь Не останавливаясь на всех деталях (см. [8,9]), отметим лишь, что данному подходу свойствен- ны недостатки предыдущего метода – большой требуемый объем обучающей выборки (десятки и сотни примеров) и возможность надежного прогнозирования только стационарных случайных процессов. С учетом изложенного можно сделать вывод, что лучшим методом решения рассматриваемой задачи является метод с использованием трендовых моделей. Рассмотрим подробнее некоторые его особенности, исходя из общей модели (2), предположив, что вектор базисных функций f(t) задан (например, выражением (3)). В соответствии с (2) запишем соотношение для i-й компоненты вектора x для произвольного момента времени tj: xi(tj) = где Полагая в (6) j=1,2,…,M, запишем систему равенств xi(t1) = xi(t2) = . . . xi(tM) = на основании которой методом наименьших квадратов (при M³m) найдем оценку
где матрица FM´m образована строками вида fT(tj), а вектор-строка
Очевидно, равенство (7) справедливо для i=1, 2,…, n. Объединение подобных равенств дает
где матрица X образована векторами-столбцами x(tj), Как видно из анализа (9), все элементы матрицы C однозначно восстанавливаются (в случае невырожденности матрицы FT×F) при M³m, что и было отмечено выше. Прогнозирование значения вектора x для момента времени tN (tN>tM) проводится по соотношению (см. (2))
а его отдельной компоненты – по формуле
Если моменты наблюдений tj удовлетворяют (4) так, что можно записать tj = j×T, j=1,2,…,M,…,N, (12) а в качестве вектора базисных функций выбраны вектор f(t) = (1, t)T (13) или вектор f(t) = (1, t, t2)T, (14) то формулам (7) и (11) можно придать компактный вид, обеспечивающий их быструю вычислительную реализацию (индекс i далее для простоты записи опустим). Так, прогнозирование осуществляется по одному из выражений:
а значения коэффициентов Таблица 2 Коэффициенты
Таблица 3 Коэффициенты
Полученные результаты могут быть полезны как для решения поставленной задачи прогнозирования номера образа, так и для более общей задачи прогнозирования многомерного случайного процесса в условиях экспериментальной выборки малого объема. Список литературы 1. Лбов Г.С., Старцева Н.Г. Логические решающие правила и вопросы статистической устойчивости решений. - Новосибирск: Изд-во Ин-та математики, 1999. 2. Редкозубов С.А. Статистические методы прогнозирования в АСУ. - М.: Энергоиздат, 1981. 3. Кендэл М. Временные ряды. - М.: Финансы и статистика, 1981. 4. Schneider T., Neumaier R. Algorithm 808: ARfit – A Matlab package for the estimation of parameters and eigenmodes of multivariate autoregressive models // ACM Trans. On Mathematical Software. 2001. Vol. 27. № 1. P. 58-65. 5. Сток Дж., Ватсон М. Векторные авторегрессии. http://www.nsu.ru/ef/tsg/ecmr/var/jepvar.htm. 6. NIST SEMATECH e-Handbook of Statistical Methods. http://www.itl.nist.gov./div898/handbook/index.htm. 7. Зубков А.В. Предсказание многомерных временных рядов с помощью нейросетей // Информационные технологии. - 2002. - № 2. - С. 20-29. 8. Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М.: Горячая линия – Телеком, 2002. 9. Осовский С. Нейронные сети для обработки информации. - М.: Финансы и статистика, 2002. 10. Демиденко Е.З. Линейные и нелинейные регрессии. М.: Финансы и статистика, 1981.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 для момента tN объекта a на основе эмпирической информации, представляющей для объекта aÎA измерения его характеристик x(tj) в моменты времени tj, j=1,2,…,M; MtM объект может быть отнесен к тому или иному классу) должно быть принято в момент tM (интервал tN-tM между выдачей прогноза и моментом начала реакции на этот прогноз включает в себя подготовительные операции, связанные, например, с прицеливанием средств ПВО на приближающийся летательный аппарат и т.п.).
для момента tN объекта a на основе эмпирической информации, представляющей для объекта aÎA измерения его характеристик x(tj) в моменты времени tj, j=1,2,…,M; MtM объект может быть отнесен к тому или иному классу) должно быть принято в момент tM (интервал tN-tM между выдачей прогноза и моментом начала реакции на этот прогноз включает в себя подготовительные операции, связанные, например, с прицеливанием средств ПВО на приближающийся летательный аппарат и т.п.).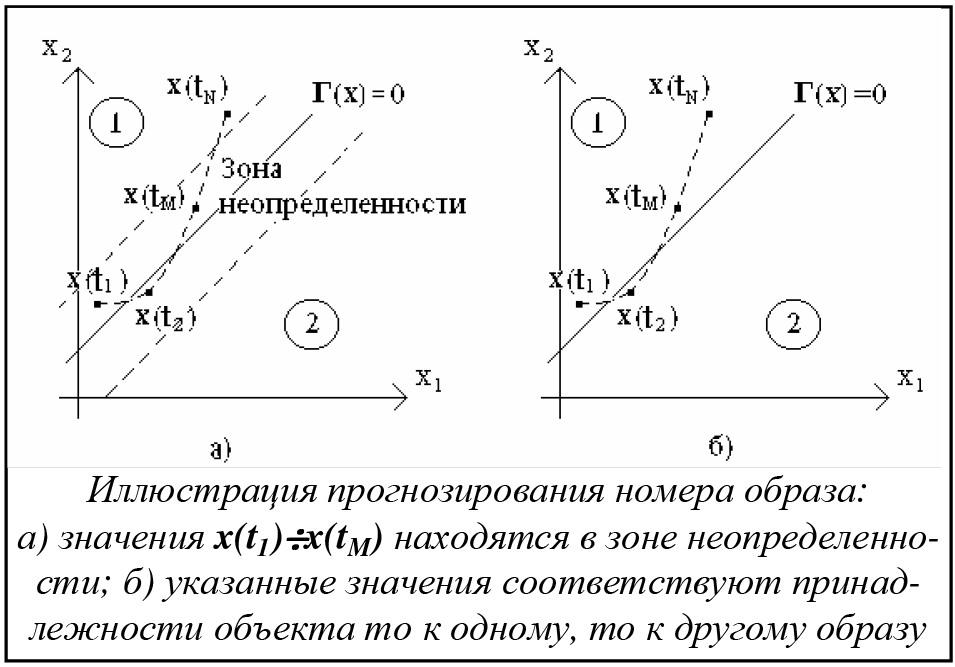
 (1)
(1) , (2)
, (2) , (5)
, (5)















 = x(k)(tj) – значение вектора признаков объекта в момент времени tj=j×T для k-го примера обучающей выборки.
= x(k)(tj) – значение вектора признаков объекта в момент времени tj=j×T для k-го примера обучающей выборки. + ei(tj),
+ ei(tj),  , (6)
, (6) – i-я строка матрицы C; ei – ошибка модели, обусловленная как систематической, так и случайной составляющими.
– i-я строка матрицы C; ei – ошибка модели, обусловленная как систематической, так и случайной составляющими. + ei(tj)
+ ei(tj) + ei(t2)
+ ei(t2) + ei(tM),
+ ei(tM), , (7)
, (7) =[xi(t1), xi(t2),…, xi(tM)]. (8)
=[xi(t1), xi(t2),…, xi(tM)]. (8) , (9)
, (9) , а i-я строка матрицы
, а i-я строка матрицы  определяются выражением (7).
определяются выражением (7). , (10)
, (10) ,
,  . (11)
. (11) , (15)
, (15) , (16)
, (16) при различных объемах M имеющихся данных приведены в таблицах 2 и 3.
при различных объемах M имеющихся данных приведены в таблицах 2 и 3. и
и  линейной модели прогноза (15)
линейной модели прогноза (15)

 квадратичной модели прогноза (16)
квадратичной модели прогноза (16)| Постоянный адрес статьи: http://swsys.ru/index.php?id=636&page=article |
Версия для печати Выпуск в формате PDF (1.36Мб) |
| Статья опубликована в выпуске журнала № 2 за 2003 год. |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Оптимизация обработки информационных запросов в СУБД
- Структурно-параметрическая идентификация функций занятости и прогнозирование спроса на молодых специалистов
- Использование матричных квадродеревьев для хранения площадных картографических объектов
- Функционально-информационные модели бухгалтерского учета
- Кросс-система автоматизации разработки программного обеспечения на базе языка высокого уровня Рада
Назад, к списку статей