Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Программные средства расчета параметров настройки автоматического регулятора на базе метода расширенных частотных характеристик
Аннотация:
Abstract:
| Авторы: Гордеев Л.С. (l.s.gordeev@yandex.ru) - Российский химико-технологический университет им. Д.И. Менделеева, Москва, Россия, доктор технических наук, Плютто В.П. () - , Дубровский И.И. () - , Лукьянов В.Л. () - | |
| Ключевое слово: |
|
| Ключевое слово: |
|
| Количество просмотров: 20240 |
Версия для печати Выпуск в формате PDF (1.60Мб) |
Одним из основных требований, предъявляемых к автоматизированным системам регулирования (АСР), является устойчивость их работы, то есть при возмущении выведенная из состояния равновесия система вновь должна вернуться к нему без какого-либо внешнего воздействия. С точки зрения практической ценности этого недостаточно, так как переходный процесс в промышленных системах должен иметь характер, определенный требованиями технологии производства. Иначе говоря, АСР должна быть не только устойчивой, но и обладать определенным запасом устойчивости. Это можно дополнить требованиями к параметрам настройки регулятора. Они должны обеспечивать заданную степень колебательности m процесса регулирования при минимуме интегрального критерия I [1]. Существуют различные методы определения параметров настройки регулятора. Остановимся на методе расширенных частотных характеристик. В инженерной практике экспериментальное определение расширенных частотных характеристик не применяется, поэтому их получают либо графически по заданным графикам обычных частотных характеристик (m=0), либо аналитически по передаточной функции объекта. Для пояснения методов определения расширенных частотных характеристик и работы созданных программных средств воспользуемся следующей передаточной функцией объекта:
Заменой p на комплексную переменную (-mw+iw) получаем расширенную амплитудно-фазовую характеристику. Так как между степенью затухания y и степенью колебательности m существует однозначная зависимость [2]
то в рассматриваемом случае заданной степени затухания y=0.75 степень колебательности m равна 0.221. Расширенная амплитудно-фазовая характеристика объекта при этом будет иметь вид:
Передаточная функция ПИ-регулятора имеет вид:
где kp – коэффициент усиления регулятора; S0=kp/Tи (Ти – время изодрома). Знак минус указывает, что действие регулятора направлено против возмущения. Окончательно получим:
Исходным уравнением для получения заданной степени колебательности процесса m, а следовательно, и определенной степени затухания y, является соотношение
Это соотношение двух комплексных чисел возможно в том случае, если произведение модулей векторов равно единице, а аргументы (фазы) отличаются на 2pn (обычно ограничиваются случаем n=0). Тогда для ПИ-регулятора получаем:
где Fo(m,w) – расширенная фазо-частотная характеристика объекта; Ro(m,w) – расширенная амплитудно-частотная характеристика объекта. Решая эти уравнения относительно kp и S0, получаем:
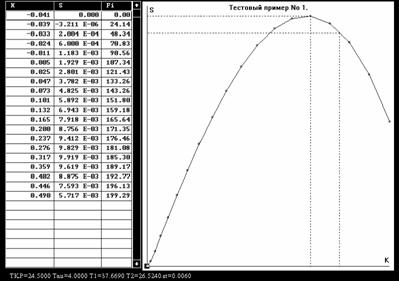
где Подставляя в уравнения (*) и (**) численные значения частоты w от 0 до значения, при котором S0 становится отрицательной, строим на плоскости параметров зависимость S0=f(kp), где S0=kp/Tи. Полученная на плоскости параметров кривая является линией равной степени колебательности, то есть значения координат лежащих на ней точек обеспечивают заданную степень затухания. Из соображений устойчивости координату kp нужно умножить на 1.2 и из полученного значения восстановить перпендикуляр к оси абсцисс до пересечения с кривой, определить S0, а затем вычислить время изодрома Ти. Для реализации вышеизложенной методики была разработана программа FORM, выполняющая определение стартовых значений параметров настройки ПИ-регулятора. Блок-схема алгоритма приведена на рисунке 1. Таким образом, разработана графическая версия поиска параметров настройки ПИ-регулятора для типовых АСР, позволяющая оперативно и, самое главное, наглядно осуществлять выбор стартовых значений коэффициента усиления и времени изодрома. Подобная методика может быть использована как при проектировании новых, так и при реконструкции или модернизации существующих схем управления для любых технологических процессов. Программа определения стартовых параметров настройки для наиболее распространенного в автоматизированных системах управления ПИ-регулятора имеет блочно-модульный принцип построения. Блок-схема алгоритма представлена на рисунке 1. В качестве исходной используется следующая информация. 1. Из результатов эксперимента по определению динамической характеристики объекта – кривой разгона – выбираются: – величина отклонения регулирующего параметра от исходного до нового установившегося состояния в результате воздействия на объект единичного ступенчатого возмущения: DH(¥). – время запаздывания – время, на протяжении которого контролируемая величина оставалась в исходном состоянии после воздействия на объект единичного ступенчатого возмущения: tзап. 2. Из методик по аппроксимации кривых разгона используются постоянные времени T1 и T2 для объектов, которые описываются уравнениями второго порядка: – шаг расчета по Omega – это варьируемый программный параметр, который должен обеспечить отображение кривой равной степени колебательности на плоскости параметров настройки в положительной области координат. – Omega – частота колебаний [рад/с]. После завершения ввода исходных данных с клавиатуры компьютера и ее проверки необходимо осуществить запуск процедуры, реализующей основные вычисления, результатом работы которой является информация, представленная в виде таблицы и графика в основном окне FORM на экране дисплея (рис. 2). С левой стороны располагается таблица с числовыми значениями вычисленных величин: K – коэффициент усиления автоматического регулятора; S – отношения этого коэффициента ко времени изодрома Tи; Fi – угол сдвига фаз между колебаниями выходной и входной величин, при ограничении Fimax=200, для того чтобы кривая равной степени колебательности находилась в положительном квадранте на плоскости параметров настройки. По полученным данным можно определить экстремальное значение величины S – Smax и соответствующий ему коэффициент усиления регулятора Kmax, а затем вычислить стартовый коэффициент усиления, обеспечивающий заданный запас устойчивости автоматической системы регулирования по формуле
Путем восстановления перпендикуляра из полученной точки Kst до его пересечения с кривой равной степени колебательности можно определить точку P; из полученной точки P опустить перпендикуляр на ось S и определить значение стартовой величины Sst, из которой вычислить время изодрома по формуле
Для удобства оформления результатов расчета параметров настройки регулятора можно воспользоваться графической частью программы FORM, разработанной студентом 6-го курса кафедры КХТП РХТУ им. Д.И.Менделеева Д. Киселевым, отображающей результаты в виде отчета (рис. 3). Образ отчета записывается в виде стандартного BMP файла на диск. Такой файл может быть отредактирован или распечатан из любой программы для обработки растровых изображений, например Adobe PhotoShop, PhotoStyler, PhotoFinish и т.д. Результаты расчета (содержание таблицы) в текстовом формате можно сохранить. Такой файл можно будет использовать практически в любом текстовом редакторе (WinWord), в приложениях для обработки электронных таблиц (Microsoft Excel) и т.д. Созданный программный модуль (программа FORM) входит в библиотеку программных средств, позволяющих на базе современной вычислительной техники решить проблему автоматизации выбора стартовых параметров настройки автоматических регуляторов, одновременно сделав этот процесс наглядным и понятным для широкого круга пользователей – аппаратчиков, технологов, операторов и других специалистов, которые по роду своей деятельности сталкиваются с проблемой эксплуатации различных автоматизированных систем регулирования. Кроме того, она может быть использована для учебно-методических целей при подготовке специалистов в области автоматизации производственных процессов для различных областей производственной и научной деятельности. Список литературы 1. Плютто В.П. Практикум по теории автоматического регулирования химико-технологических процессов. - М.: Химия, 1969.-112 с. 2. Дудников Е.Г. Основы автоматического регулирования тепловых процессов.- М.: Госэнергоиздат, 1956.-264 с. |
 .
. ,
,
 ,
,
 .
. ,
, ,
, , (*)
, (*) , (**)
, (**) .
.
 .
. .
.
| Постоянный адрес статьи: http://swsys.ru/index.php?id=976&page=article |
Версия для печати Выпуск в формате PDF (1.60Мб) |
| Статья опубликована в выпуске журнала № 1 за 1998 год. |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Компьютер - хранитель домашнего очага
- Компьютерные технологии сегодня: тенденции и прогнозы
- Построение тестов для базовых функций встраиваемых операционных систем
- Оптимизация структуры базы данных информационной системы ПАТЕНТ
- Интеллектуальные хранилища данных в системах государственного управления
Назад, к списку статей