Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Вопросы создания АСУ космическими полетами беспилотных аппаратов в околоземном пространстве
Аннотация:На сегодняшний день актуально создание АСУ космическими полетами беспилотных аппаратов в околоземном пространстве одним космическим аппаратом или их группировкой. Одно из центральных мест в задачах управления космическими полетами занимает баллистико-навигационное обеспечение, включающее постановку задач, разработку методов и алгоритмов их решения, комплекс вычислительных процедур, которые используются в дальнейшем при управлении полетом космического аппарата. Одной из задач баллистико-навигационного обеспечения является определение параметров движения космических аппаратов в пространстве (текущих и прогнозных). Навигационное обеспечение дает возможность определять и уточнять полет космического аппарата, обеспечивать наведение, сбли-жение, спуск с орбиты и т.д. Анализ процессов функционирования, проблем создания АСУ космическими полетами невозможны без построения математической модели или агрегированной совокупности моделей составных элементов, отражающих свойства объекта моделирования. Одной из основных задач космических полетов является техническая разведка из космоса, предназначенная для укрепления оборонной мощи РФ и национальной безопасности. Реализация насущных проблем в данной области для РФ возможна на основе создания группировки космических аппаратов при применении высокоэллиптических орбит. В этой связи в статье рассматривается актуальная задача построения спутниковых систем непрерывного обзора Земли на высокоэллиптических орбитах. Данная задача сводится к поиску экстремума функции от конечного числа параметров, имеющей смысл геоцентрического углового расстояния. Число параметров велико, критериальная функция сложна. Для облегчения анализа и упрощения вычислений предложены варианты понижения размерности задачи. Предложены показатели эффективности функционирования АСУ космическими полетами.
Abstract:Nowadays a creation of automated control systems for unmanned space missions in near-Earth space, for a spacecraft or a group of them is relevant. One of the central problems in the mission control is ballistic and navigation support, including setting targets, developing methods and algorithms to solve them, a complex of computational procedures, which are used later in the spacecraft flight control. One of the tasks of ballistic and navigation support is to determine the parameters of spacecraft motion in space (current and projected). Navigation gives you the ability to define and correct a space mission, to provide guidance, convergence, disorbit, etc. The analysis of the operation processes and the problems of creating automated control systems for mission control is impossible without a mathematical model or an aggregated set of components’ models, which reflect the properties of the modeling object. One of the main problems of spaceflights is a technical exploration of space, designed to strengthen the defense power of the Russian Federation and national security. Implementation of the pressing problems in this area for the Russian Federation is possible to base on the creation of spacecraft groups using highly elliptical orbits. In this regard, the article discusses the urgent task of building the satellite systems of continuous coverage of the Earth in highly elliptical orbits. This problem is reduced to finding the extremum of a function of a finite number of parameters, the function must have the meaning of a geocentric angular distance. The number of parameters is large, the criterion function is composite. To facilitate the analysis and simplify the calculations, the authors suggest the variants of problem dimension reduction, as well as the parameters of the operating effect of spaceflights automated control systems.
| Авторы: Арепин Ю.И. (arep@cps.tver.ru) - НИИ «Центрпрограммсистем», г. Тверь, г. Тверь, Россия, доктор технических наук, Доронкина А.Н. (annadoronkina@bk.ru) - Тверской государственный университет (аспирант), Тверь, Россия | |
| Ключевые слова: непрерывный обзор поверхности земли, оптимизация, спутниковая система, высокоэллиптическая орбита, техническая разведка, математическая модель, баллистико-навигационное обеспечение, космический аппарат, автоматизированная система управления |
|
| Keywords: continuous review of the Earth's surface, optimisation, satellite system, highly elliptical orbits, technical intelligence, mathematical model, ballistic and navigation support, spacecraft, automatized control system |
|
| Количество просмотров: 11922 |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
В настоящее время осуществление длительных околоземных орбитальных полетов спутников невозможно представить без детальной проработки и решения задач управления космическими полетами (КП) беспилотных аппаратов в околоземном пространстве.
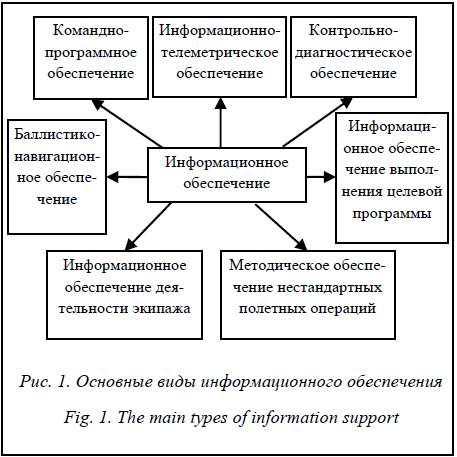
Усложнение космической техники, высокие требования к оперативности и эффективности полетов, специфика решаемых задач и многочисленность решаемых спутниками задач способствовали выделению проблемы управления КП в самостоятельное научное направление. Информационное обеспечение управления полетом, содержащее баллистико-навигационное обеспечение (БНО), контрольно-диагностическое, командно-программное и др. виды обеспечения (рис. 1) [1], и доведение его до уровня программно-математического обеспечения АСУ КП является сложной задачей, включающей алгоритм, программы, описания и инструкции, реализуемые бортовыми и наземными комплексами управления. Важнейшим видом обеспечения при решении задач управления полетами космических аппаратов (КА) является БНО, включающее постановку задач, разработку методов и алгоритмов их решения, комплекс вычислительных процедур, которые используются в дальнейшем при управлении полетом КА [2–7]. Навигационное обеспечение дает возможность определять и уточнять полет КА по результатам внешнетраекторных и автономных измерений текущих навигационных параметров путем коррекции орбиты, обеспечивать наведение, сближение, спуск с орбиты и т.д. Основные требования, предъявляемые к БНО, сводятся к точности, достоверности и надежности решений, а также оперативности их получения. Задачи БНО для управления полетом КА можно разделить на две категории: определение параметров движения КА в пространстве (текущих и прогнозных) и получение сопутствующих баллистических данных (стандартная баллистическая информация).
На современном уровне развития БНО выдает следующую основную информацию [1]: – баллистическая схема полета, разрабатываемая из условия надежного решения целевых задач с наименьшими затратами; – параметры расчетной траектории выведения на орбиту и самой орбиты КА, определяемые принятой баллистической схемой полета и текущими условиями; – параметры фактической орбиты, эфеме- риды, трасса спутника («след» орбиты на поверхности Земли), данные на спуск КА с орбиты, рассчитываемые заранее, а также оперативно по результатам измерений текущих навигационных параметров и их прогнозируемые значения на текущий момент времени; – баллистическая информация, необходимая для оперативного планирования полета (периоды радиовидимости, условия освещенности интервалов орбиты и/или трассы, условия наблюдения поверхности Земли и небесной сферы и др.). В настоящее время актуальными проблемами для РФ являются обеспечение динамичного социально-экономического развития северных регионов на основе эффективной навигации по Северному морскому пути, а также безопасных полетов авиации в высоких широтах. При этом важную роль играет техническая разведка (ТР) поверхности Земли и воздушного пространства из космоса, которая также имеет важное оборонное значение. Реализация ТР возможна на основе создания группировки КА при применении высокоэллиптических орбит (ВЭО). Преимущества применения ВЭО при наблюдении арктического района известны [8]. ТР может обеспечить глобальную съемку освещенной и теневой сторон Земли в видимом, инфракрасном и микроволновом диапазонах спектра, локальную съемку радиолокационными средствами и многозональным съемочным комплексом, температурно-влажностное зондирование атмосферы и сбор данных о газовых составляющих атмосферы Земли, исходные измерения для прогноза погоды в региональном и глобальном масштабах, контроль чрезвычайных ситуаций и экологии окружающей среды и др. В настоящее время могут применяться радиотехнические, оптические, гравиметрические, магнитометрические системы измерения текущего состояния КА и фактической траектории его движения. Основными из них являются радиотехнические и оптические. Радиотехнические измерения базируются на изменении характеристик радиосигнала, обусловленного изменением параметров движения КА, а оптические – на свойствах прямолинейности распространения света в однородной среде. В зависимости от требуемой точности и состава средств измерений параметров движения КА выбирают тот или иной метод определения текущих параметров орбиты КА. Задачи оптимизации параметров движения спутников (или спутниковых систем (СС)) являются основными в современной космической баллистике. При этом ограничения, налагаемые на баллистическое строение космических систем, обусловлены в основном стремлением облегчить анализ и упростить вычисления. При оптимизации параметров движения СС центральное место занимает задача определения параметров орбит СС. Разными авторами предложены различные методы синтеза орбитальных структур СС [4, 7, 9, 10]. Классификация методов приведена на рисунке 2. Рассмотрим одно из направлений технической разведки из космоса – непрерывный обзор Земли (НОЗ) (территорий и отдельных объектов на поверхности Земли) СС на ВЭО. Анализ процессов функционирования, проблем создания АСУ КП невозможен без построения математической модели или агрегированной совокупности моделей составных элементов, отражающих свойства объекта моделирования. Поэтому далее рассмотрен подход к моделированию, которое может применяться при создании оптимальной по выбранному критерию СС. Пусть СС характеризуется следующими условиями: – система состоит из N искусственных спутников Земли (ИСЗ), которые движутся по m орбитам по n спутников на каждой, N=m×n; – все спутники движутся по орбитам эллиптического типа с периодом Tl, – движение ИСЗ невозмущенное; – сопротивление атмосферы, нецентральность поля тяготения Земли, влияние Луны, Солнца, давление солнечного света и другие подобные факторы, оказывающие существенное воздействие на движение спутников, не учитываются; – поверхность Земли является сферой радиуса RЗ. Каждый k-й ИСЗ (
Кроме этого, каждый спутник имеет свой угол обзора. Допустим, что угол обзора любого спутника системы один и тот же и равен 2γ (рис. 3) [2]. Система ИСЗ обеспечивает НОЗ, если любая точка поверхности в любой момент видна хотя бы с одного из спутников [4]. Орбита каждого k-го ИСЗ ( Таким образом, структура всей системы ИСЗ определяется 6´N кеплеровскими элементами, имеющими следующее множество допустимых значений Gk:
Пусть rk – радиус-вектор, направленный из центра масс Земли на k-й ИСЗ в момент времени t, rA – радиус-вектор, направленный на произвольную точку А поверхности Земли; f(rk, rA, t) – геоцентрическое угловое расстояние между точкой А и k-м спутником в момент времени t. Выбранная точка А на поверхности Земли будет видна в момент времени t по крайней мере одним из спутников системы тогда, когда минимальное из чисел f(r1, rA, t), f(r2, rA, t), …, f(rN, rA, t) не превышает
где Задачу непрерывного обзора можно сформулировать следующим образом: найти минимум функции
определенной на множестве
то есть решить задачу оптимизации
с ограничениями Число параметров задачи (2) достаточно велико. Ввиду сложности критериальной функции целесообразно для упрощения задачи понизить ее размерность, вводя дополнительные ограничения. Обратим внимание на то, что параметры ak, ek, ik, Ωk, ωk у спутников одной орбиты одинаковые. Значит, n+5 параметров имеют спутники одной орбиты, а вся СС имеет (n+5)∙m = N+5m параметров. Поэтому число параметров задачи НОЗ сокращается с 6N до N+5m. Если считать, что все орбиты СС имеют одинаковую форму (большая полуось и эксцентриситет у всех орбит одни и те же), то число параметров задачи уменьшается до N+5m–(2m–2)= =N+3m+2. Если спутники одной орбиты разнесены по орбите на равном расстоянии друг от друга, можно учитывать время прохождения перигея лишь одного из n спутников на каждой орбите и размерность задачи понижается до N+3m+2–(N–m) = = 4m+2. Реализация качественного управления КП может достигаться за счет совершенствования программно-технических средств СС, которые позволяют обеспечивать управление полетом (планирование, синтез управляющих воздействий, БНО и т.п.). Упомянутые программно-технические средства должны реализовывать экспертную поддержку действий наземных средств управления КА, обладать свойствами искусственного интеллекта, формировать решения и планы действий в условиях дефицита времени и информации. Важнейшей задачей для любой сложной системы является оценка эффективности ее функционирования. Вопросам эффективности АСУ посвящен ГОСТ 24.702-85. При разработке АСУ КП для оценки эффективности ее функционирования могут быть применены следующие частные показатели [11]: – точность управления полетом по штатной программе
где m1 – число правильных управляющих воздействий; – точность идентификации нештатных ситуаций
где n1 – число правильно идентифицированных НС; – оперативность управления в расчетных нештатных ситуациях
где В качестве интегрального показателя эффективности функционирования АСУ КП при синтезе состава программно-технических средств наиболее целесообразно применение известного показателя «эффективность–стоимость» [12], в котором эффективность – это агрегированный показатель, состоящий из (3), (4), (5), а знаменатель – балансовая стоимость программно-технических средств [12], размещаемых на борту КА и в составе наземных систем управления. Таким образом, в статье очерчены основные направления и функции БНО, являющегося важной частью в решении задач управления полетами КА. Одной из основных задач БНО является определение текущих и прогнозных параметров движения КА в пространстве. Приведена классификация методов синтеза орбитальных структур СС. Представлено формальное описание задачи управления полетами КА в интересах технической разведки и обзора объектов на поверхности Земли. В статье предложен подход к моделированию процесса оптимизации параметров эллиптических орбит СС. Путем введения дополнительных ограничений существенно понижена размерность данной задачи. Предложены показатели эффективности функционирования АСУ КП. Литература 1. Лысенко Л.Н., Бетанов В.В., Звягин Ф.В. Теорети- ческие основы баллистико-навигационного обеспечения кос- мических полетов. М.: Изд-во МГТУ им. Н.Э. Баумана, 2014. 518 с. 2. Доронкина А.Н. Подход к моделированию процесса оптимизации параметров эллиптических орбит спутниковой системы // Программные продукты и системы. 2015. № 1. С. 87–91. 3. Арепин Ю.И., Доронкина А.Н. Теоретико-групповой подход к решению задачи синтеза орбитальных группировок космических аппаратов на орбитах эллиптического типа // 43-я воен.-науч. конф. ВА ВКО им. Г.К. Жукова: науч.-методич. сб., секц. № 2, Тверь, 2014. С. 7–11. 4. Можаев Г.В. Синтез орбитальных структур спутниковых систем (теоретико-групповой подход). М.: Машиностроение, 1989. 304 с. 5. Галиев Ш.И., Заботин В.И. О непрерывном обзоре поверхности Земли // Исследование Земли из космоса. 1983. № 1. С. 117–120. 6. Можаев Г.В. Проблемы оптимизации движения спутниковых систем: состояние исследований и перспективы // Труды МАИ. 2009. Вып. 34; URL: http://www.mai.ru/science/trudy/published.php?ID=7434 (дата обращения: 04.02.2015). 7. Кузьмин А.В. Математические модели и методы оптимизации структур спутниковых систем многократного обзора Земли: дисс. … канд. технич. наук. Казань, 1999. 140 с. 8. Меньшаков Ю.Л. Техническая разведка из космоса. М.: Academia, 2013. 656 с. 9. Баринов К.Н., Бурдаев М.Н., Мамон П.А. Динамика и принципы построения орбитальных систем космических аппаратов. М.: Машиностроение, 1975. 270 с. 10. Горбулин В.И. Оптимизация орбитального построения глобальных космических систем наблюдения. СПб: Изд-во МО РФ, 2001. 171 с. 11. Соловьев В.А., Лысенко Л.Н., Любинский В.Е. Управление космическими полетами: учеб. пособие: Ч. 1. М.: Изд-во МГТУ им. Н.Э. Баумана, 2009. 476 с. 12. Военная экономика: управление, планирование, военно-экономическая безопасность; [под ред. А.С. Сумина, Ю.И. Арепина]. М.: Изд-во ВИМИ, 1995. 183 с. |

 ;
; ) в любой момент видит на поверхности Земли сферический круг некоторого углового радиуса αk(t) с центром в подспутниковой точке [2], изменяющийся с течением времени при полете ИСЗ от своего перигея к апогею (рис. 3). Множество точек поверхности Земли, видимых со спутника в данный момент, являются мгновенной зоной обзора спутника.
) в любой момент видит на поверхности Земли сферический круг некоторого углового радиуса αk(t) с центром в подспутниковой точке [2], изменяющийся с течением времени при полете ИСЗ от своего перигея к апогею (рис. 3). Множество точек поверхности Земли, видимых со спутника в данный момент, являются мгновенной зоной обзора спутника.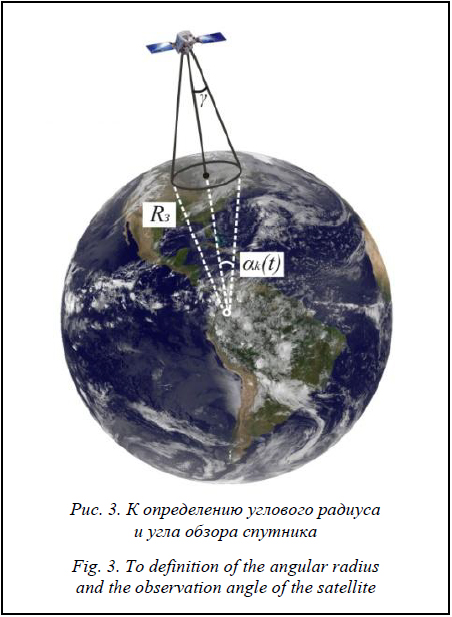
 ) системы характеризуется шестью независимыми кеплеровскими элементами [9]: ik – наклонение; Wk – долгота восходящего узла; ak – большая полуось; ek – эксцентриситет; ωk – аргумент перигея; τk – время прохождения перигея.
) системы характеризуется шестью независимыми кеплеровскими элементами [9]: ik – наклонение; Wk – долгота восходящего узла; ak – большая полуось; ek – эксцентриситет; ωk – аргумент перигея; τk – время прохождения перигея. .
. [2]. Поэтому для того, чтобы система осуществляла непрерывный обзор Земли, достаточно выполнить неравенство
[2]. Поэтому для того, чтобы система осуществляла непрерывный обзор Земли, достаточно выполнить неравенство , (1)
, (1) ; S – множество точек поверхности Земли; topt – момент времени, когда достигает оптимума левая часть (1); Tk,
; S – множество точек поверхности Земли; topt – момент времени, когда достигает оптимума левая часть (1); Tk,  – период обращения k-го спутника [2].
– период обращения k-го спутника [2]. ,
, ,
, (2)
(2) , 0, затем проверить выполнение условия (1) [2].
, 0, затем проверить выполнение условия (1) [2]. , (3)
, (3) – общее число воздействий;
– общее число воздействий; , (4)
, (4) – общее число НС;
– общее число НС; , (5)
, (5) – фактическое время, затраченное на осуществление цикла управления в i-й нештатной ситуации;
– фактическое время, затраченное на осуществление цикла управления в i-й нештатной ситуации;  – нормативная минимальная длительность цикла управления в i-й нештатной ситуации;
– нормативная минимальная длительность цикла управления в i-й нештатной ситуации;  – нормативная максимальная длительность цикла управления в i-й нештатной ситуации; nS – общее число нештатных ситуаций.
– нормативная максимальная длительность цикла управления в i-й нештатной ситуации; nS – общее число нештатных ситуаций.| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4033 |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
| Статья опубликована в выпуске журнала № 3 за 2015 год. [ на стр. 88-92 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Подход к моделированию процесса оптимизации параметров эллиптических орбит спутниковой системы
- Репрезентативность метрик на основе событий процессора Intel Sandy Bridge при анализе времени обработки данных в памяти
- Моделирование программы таксономии технологий изготовления деталей машиностроительного профиля с помощью сетей Петри
- Программный комплекс для расчета процесса нанесения покрытия в псевдоожиженном слое
- Подход к использованию меры возможности при оценке принимаемых решений
Назад, к списку статей