Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Идентификация состояния сложной технической системы в условиях неопределенности измерительной информации
Аннотация:В статье обозначена актуальная задача идентификации функционального состояния сложной технической системы в условиях повышенной зашумленности с помощью перехода к другому пространству признаков наблюдаемого состояния, определено понятие «функциональное состояние». Задача оценки функционального состояния показана как дуальная задача идентификации и распознавания образов. Уделено внимание возможному выбору параметров математических моделей, а также их структур в качестве новых признаков наблюдаемого состояния. Для решения задачи параметрической идентификации выбран метод наименьших квадратов, показывающий смену функционального состояния. В задачах контроля и испытания сложными техническими системами немаловажную роль играет процесс анализа измерительной информации. Только пройдя все этапы обработки, можно принять решение о том или ином состоянии объекта испытаний. Однако сделать это сложно в случае поступления информации очень низкого качества. Устранение данной проблемы сводится в основном к поиску решений по формированию и совершенствованию соответствующих правил принятия управленческих решений. При этом в штатных условиях и ситуациях создание таких правил во многих случаях не вызывает особых проблем, однако в нештатных условиях сделать это проблематично. Анализ состояния сложных технических объектов или их подсистем по результатам измерений предполагает решение задач структурной и параметрической идентификации. Управление сложными техническими объектами и их испытание характеризуются неопределенностью воздействия внешних факторов, аномальными и случайными погрешностями измерений. Для обеспечения требуемого качества анализа состояния их подсистем необходимо формирование принципов адаптивного управления процессом идентификации, методик оптимального выбора структуры моделей исходя из качества данных измерений. Особенно это актуально при автоматизации вторичной обработки на объектах с терминальным управлением.
Abstract:The article considers a topical problem of identification of a complex technical system functional state in conditions of increased noisiness using a transition to another attribute space of the observed state. The authors define the term “functional state”. The paper shows the problem of estimating a functional state as a dual problem of identification and pattern recognition. It pays attention to a possible selection of parameters of mathematical models and their structures as new signs of the observed state. As an example, in order to solve the parametric identification problem, the authors have selected the method of least squares. It shows the changing of the functional state. The process of analyzing measuring information plays an important role in the tasks of monitoring and testing by complex technical systems. Only after passing through all stages of processing, it is possible to decide on the condition of the test object. However, it is difficult to do in case of poor quality information. Elimination of this problem is mainly comes to searching solutions in order to form and improve relevant rules for management decision-making. At the same time, in normal conditions and situations, creation of such rules in many cases does not cause any special problems. Nevertheless, in abnormal conditions it is problematic. The state analysis of complex technical objects or their subsystems according to the measurement results assumes the solution of structural and parametric identification problems. Management of complex technical objects and their testing is characterized by uncertainty of external influence, anomalous and accidental measurement errors. To ensure the required quality of their subsystems state analysis, it is necessary to form the principles of identification process adaptive control, the methods of an optimal choice of a model structure based on the quality of measurement data. This is particularly topical for automation of secondary processing at terminal control facilities.
| Авторы: Генов А.А. (vlad_osipovv@mail.ru) - НИИСИ РАН (профессор, ведущий научный сотрудник), г. Москва, Россия, доктор технических наук, Русаков К.Д. (rusakov.msk@yandex.ru) - Институт проблем управления им. В.А. Трапезникова РАН (младший научный сотрудник), Москва, Россия, Хиль С.Ш. (skhill@mail.ru ) - Московский авиационный институт (национальный исследовательский университет) (доцент), Москва, Россия, кандидат технических наук | |
| Ключевые слова: метод наименьших квадратов, параметрическая идентификация, распознавание образов, повышенная зашумленность, сложная техническая система, функциональное состояние, идентификация состояния |
|
| Keywords: method of least squares, parameter identification, pattern recognition, increased noisiness, complex technical system, functional state, state identification |
|
| Количество просмотров: 9587 |
Статья в формате PDF Выпуск в формате PDF (21.91Мб) Скачать обложку в формате PDF (0.59Мб) |
Повышение уровня автоматизации процессов управления состояниями сложных технических систем получает активное развитие. Решение данной проблемы сводится в основном к поиску способов формирования и совершенствования соответствующих правил принятия управленческих решений. При этом в штатных условиях и ситуациях создание таких правил во многих случаях не вызывает особых проблем, однако в нештатных условиях сделать это проблематично. В задачах контроля и испытания сложных технических систем немаловажную роль играет анализ измерительной информации. Только пройдя все этапы обработки, можно принять решение о том или ином состоянии объекта испытаний. Однако это сложно сделать, если объем измерительной информации недостаточен и велика помеховая составляющая. Дефиниция функционального состояния Одним из показателей технического состояния объекта является правильное/неправильное функ- ционирование. Заметим, что при функционирова- нии объекта испытаний система управления задей- ствует в нем различные функции, узлы, агрегаты. Из этого следует, что под воздействием системы управления объект будет находиться в различных устойчивых и равновесных фазах своего функционирования, которые будем определять как функциональные состояния объекта испытаний. Понятие функционального состояния является математической интерпретацией режимов функционирования сложного технического объекта. В [1] отмечено, что модель объекта должна отвечать целям ее использования. Применительно к задачам ситуационного управления это означает, что должно существовать такое соответствие между множеством состояний выбранной модели и множеством возможных целей управления объектом, которое позволяет однозначно идентифицировать каждую цель во множестве этих состояний. В математической форме это требование может быть записано в следующем виде: R Ì Q, где Q – отношение эквивалентности, определенное на множестве состояний модели таким образом, чтобы множество его классов на этом множестве взаимно-однозначно соответствовало множеству имен целей в управлении объектом. Все модели, удовлетворяющие данному условию, могут быть использованы для решения задач ситуационного управления поведением объектов в пространстве их состояний. Это означает, что им присуще свойство функциональности, выражающееся в наборе возможностей (функций), которые предоставляет (выполняет) данный объект. На этом основании такие модели будем называть функциональными моделями объекта, а используемые в них состояния – функциональными состояниями. Таким образом, функциональное состояние – это атрибут детерминированной модели управляемых изменений в процессах функционирования технического объекта, который а) характеризует в модели устойчивую и равновесную фазу этих процессов относительно заданного подмножества воздействий внешней среды и выбранного интервала времени существования объекта; б) имеет уникальное имя, семантическую интерпретацию и идентифицируется в значениях параметров этих процессов, знание которых и оказываемых на объект управляющих воздействий в выбранный момент времени является необходимым и достаточным условием для прогнозирования будущих значений этих параметров через определенные в модели интервалы времени с точностью, позволяющей однозначно идентифицировать соответствующие им имена этого атрибута. Постановка задачи оценки функционального состояния как задачи идентификации Постановка задачи в общем виде будет следующей. 1. Система, относящаяся к классу динамических систем:
при следующих ограничениях:
2. Модель наблюдений: y = H × g + x(t), где y – вектор наблюдения; H – матрица связи наблюдаемых параметров и вектора состояния системы; x(t) – внешнее воздействие. 3. Модель измерений с аддитивной помехой: z = y + n(t). По результатам измерений z(t), t Î W, опре- делить функциональное состояние системы Fi = f(t, П, v) на интервале времени t Î [tk … tn] при максимуме вероятности правильного принятия решения о функциональном состоянии системы: PппрФС ® ® max. Особенностью и новизной данной постановки является наличие зависимости изменений функциональных состояний от соответствующих правил принятия решений. Постановка задачи оценки функционального состояния как задачи распознавания образов. Выбор признаков Для решения данной задачи необходимо решить задачу классификации. 1. Известна модель функционирования объекта испытаний G(t) = {gk(t)}, k = 1, …, q, где gk(t) – внутренние параметры состояния объекта. 2. На основе априорного анализа задано множество классов функционального состояния объекта испытаний: F = {Fl}, l = 1, …, r. 3. Известно множество признаков П = {pj}, j = 1, …, m, обеспечивающих наблюдаемость функциональных состояний при выбранном методе. При этом признаки являются функциями от внутренних параметров состояния объекта испытаний pj = z[gk(t)]. 4. Задано отношение H : F ® П между множествами классов функциональных состояний F и признаков контроля в виде соответствующей матрицы. 5. Задано множество измеряемых параметров L = {li}, i = 1, …, n, позволяющее определить значения признаков. Известно, что в общем случае наблюдаемые параметры являются нелинейными функциями от параметров состояния l(t) = h[g(t)] + + Dl, где Dl – погрешность измерений, и признаков контроля lj = s(p). 6. Измерительная система представлена в виде операторов измерений L: {gk(t)} ® l(t), операторов первичной L1: l(t) ® {p*; t} и вторичной L2: {p*; t} ® {Fl*} обработки измерений, где каждый из операторов задается на множестве методов {M} и алгоритмов {A} обработки и анализа информации. 7. Задан показатель эффективности решения задачи определения функционального состояния PппрФС ® max. Стоит отметить, что вероятность правильного принятия решения уменьшается при увеличении шумовой составляющей в измерительной информации. Для ее повышения целесообразно перейти к другому пространству признаков наблюдаемого состояния. В качестве новых признаков будем рас- сматривать модели соответствующих функцио- нальных состояний и параметры этих моделей. Численное моделирование
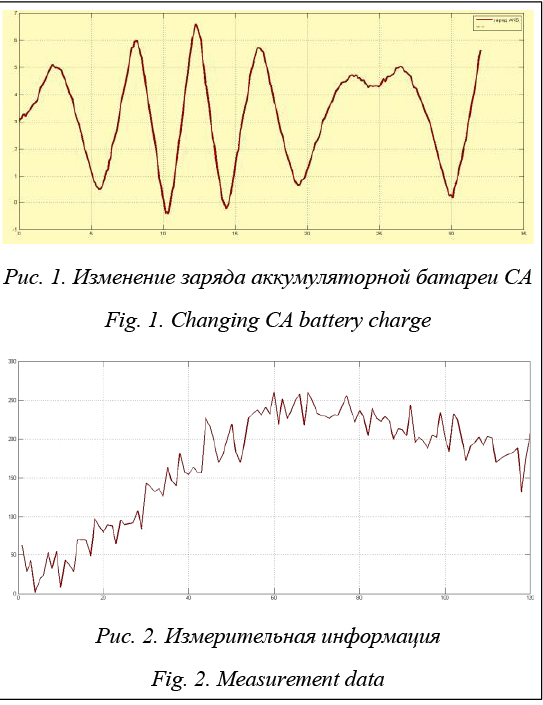
На рисунке 2 представлена часть информации, показывающей переход из одного функционального состояния в другое в условиях шума. Интуитивно можно сделать вывод, что при высоком уровне шума более «грубая» модель точнее опишет процесс. Применяя модель более низкого порядка, например полином первой степени, отслеживаем изменение параметров этого полинома и, как только эти параметры изменились, можем сделать вывод о смене функционального состояния. Так как наиболее распространенным методом оценивания параметров, служащим базовым подходом к параметрической идентификации, является метод наименьших квадратов, который в предположении линейности и дискретности во времени объекта приводит к наиболее простым и универсальным решениям, воспользуемся им. Задача состоит в следующем: по имеющимся выборочным данным наблюдений за входным и выходным сигналами с интервалом дискретизации Δt требуется оценить значения параметров, обеспечивающих минимум величины функционала невязки между модельными и фактическими данными. Таким образом, структура модели имеет вид y = a1x + a2 при заданных коэффициентах a1 = 4, a2 = 5. Критерий минимума среднеквадратичной ошибки в этом случае определяется функционалом Система уравнений для нахождения коэффициентов ai принимает вид
Преобразуя данное соотношение, получим следующую систему в матричном виде:
Для удобства примем следующие обозначения:
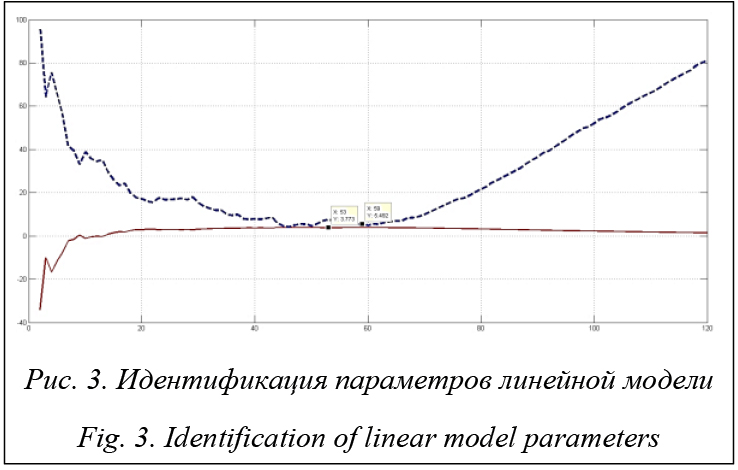
Таким образом, решением системы являются искомые выражения для коэффициентов уравнения at: Результаты представлены на рисунке 3.
Заключение Результаты эксперимента показывают, что в условиях шума в измерительной информации примерно на 60-й секунде происходит изменение параметров модели в виде полинома первой степени, что говорит о смене функционального состояния системы. Стоит отметить, что в зависимости от динамики процесса, уровня шумовых воздействий и режимов функционирования применяемые модели будут различными. Таким образом, другие, более грубые модели, а также их параметры можно использовать в каче- стве признаков наблюдаемого состояния системы в условиях различного качества измерительной информации, а следовательно, получить достоверную оценку функционального состояния системы. Литература 1. Кириллов Н.П. Функциональное состояние технического объекта. Дефиниция понятия // Авиакосмическое приборостроение. 2010. № 10. С. 31–40. 2. Васильев В.В. Математические методы анализа летательных аппаратов как объектов управления и испытания. М.: Изд-во МО РФ, 1992. 3. Дилигенская А.Н. Идентификация объектов управления. Самара: Изд-во СГТУ, 2009. 136 с. 4. Русаков К.Д. К оценке функционального состояния объектов РКТ в условиях различного качества измерительной информации // Нейрокомпьютеры и их применение: тез. докл. XIV Всерос. науч. конф. М.: Изд-во МГППУ, 2016. С. 89. 5. Русаков К.Д., Хиль С.Ш. О задаче выбора признаков наблюдаемого состояния сложного динамического объекта в условиях различного качества измерительной информации // Нейрокомпьютеры и их применение: тез. докл. XV Всерос. науч. конф. М.: Изд-во МГППУ, 2017. С. 246–248. 6. Рожнов А.В., Кривоножко В.Е., Лычев А.В. Построение гибридных интеллектуальных информационных сред и компо- нентов экспертных систем на основе обобщенной модели ана- лиза среды функционирования // Нейрокомпьютеры: разработка, применение. 2013. № 6. С. 3–12. 7. Кириллов Н.П. Структурно-функциональная модель причинно-следственных закономерностей управляемого поведения технических систем // Тр. СПИИРАН. СПб: Наука, 2008. Вып. 5. С. 285–299. 8. Васильев В.В., Галаев С.А., Лесниченко Р.И., Мезен- цев А.В., Потюпкин А.Ю., Рудаев С.А. Методологические основы испытаний сложных технических систем. М.: Изд-во ВА РВСН им. Петра Великого, 2013. 286 с. 9. Потюпкин А.Ю., Чечкин А.В. Интеллектуализация сложных технических систем: монография. М.: Изд-во МО РФ, 2013. 289 с. 10. Дмитриев А.К., Мальцев П.А. Основы теории построения и контроля сложных систем. Л.: Энергоатомиздат, 1988. 192 с. 11. Рожнов А.В. Творческие материалы «круглого стола». Часть II. Системная интеграция и моделирование новых эффектов в сфере интеллекта // Нейрокомпьютеры: разработка, применение. 2016. № 3. С. 3–12. 12. Лобанов И.А. Регенеративный анализ в задаче формирования адаптивного информационно-управляющего пространства // Нейрокомпьютеры и их применение: тез. докл. XIV Всерос. науч. конф. М.: Изд-во МГППУ, 2016. С. 26–28. |
 = fg(g, t, F, u), где g – вектор состояния динамической системы gT = [g1 g2 … gn], gi – параметры вектора состояния; u – вектор внешних воздействий динамической системы uT = [u1 u2 … un]; F – множество функциональных состояний динамической системы Fi Î F, Fi = f(t, П, v), где П – правило принятия решения об изменении функциональных состояний, которое выглядит следующим образом:
= fg(g, t, F, u), где g – вектор состояния динамической системы gT = [g1 g2 … gn], gi – параметры вектора состояния; u – вектор внешних воздействий динамической системы uT = [u1 u2 … un]; F – множество функциональных состояний динамической системы Fi Î F, Fi = f(t, П, v), где П – правило принятия решения об изменении функциональных состояний, которое выглядит следующим образом:
 .
. .
. .
.

| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4304 |
Статья в формате PDF Выпуск в формате PDF (21.91Мб) Скачать обложку в формате PDF (0.59Мб) |
| Статья опубликована в выпуске журнала № 3 за 2017 год. [ на стр. 373-377 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Программное обеспечение для автоматизированного обнаружения и оценки разрушений соединительных швов зданий
- Выделение и анализ скелетов объектов на цветных снимках
- Обоснование применения электронных тренажеров для обучения операторов
- Система автоматического картографирования знаков дорожного движения
- Программный комплекс для компьютерного моделирования процессов параметрической идентификации математических моделей конвективно-диффузионного переноса
Назад, к списку статей