Верификация моделей систем на базе эквациональной характеристики формул LTL
| Кораблин Ю.П. (y.p.k@mail.ru) - Российский государственный социальный университет, г. Москва (профессор), Москва, Россия, доктор технических наук, Кочергин А.С. (kocherginalexandr@gmail.com) - Российский государственный социальный университет (аспирант), Москва, Россия, Шипов А.А. (a-j-a-1@yandex.ru) - Московский технологический университет (МИРЭА) (старший инженер-программист), Москва, Россия, кандидат технических наук | |
| Ключевые слова: ctl, ltl, формула временной логики, автомат бюхи, модель крипке, эквациональная характеристика rltl, model checking, верификация |
|
| Keywords: ctl, ltl, temporal logic formula, Buchi automaton, kripke structure, rltl equation characteristics, model checking, verification |
|
|
|
|
Верификация программных и технических систем является сегодня одним из важнейших этапов их жизненного цикла. Для этих целей уже создано и успешно апробировано множество различных средств и методов разного типа сложности и применимости. Однако наиболее часто используемыми и востребованными, как правило, остаются средства формальной верификации, работа которых может быть в той или иной мере автоматизирована в отличие от, например, динамических методов верификации и экспертиз.
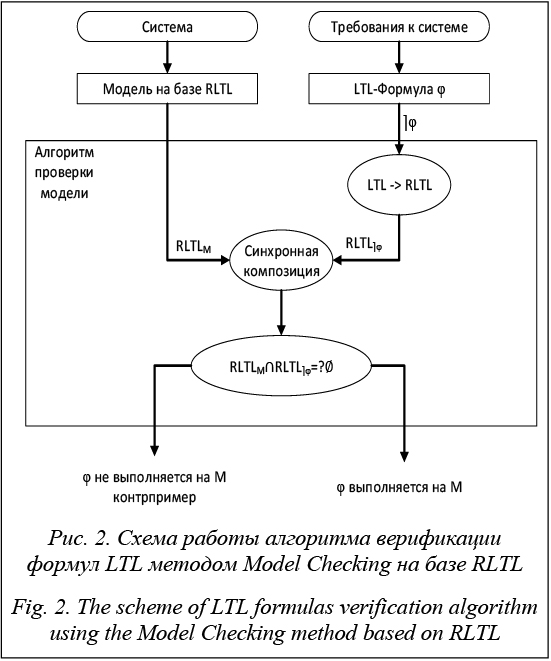
Использование данной схемы в чистом виде при верификации моделей систем больших размеров (более 220 состояний) во многих случаях может приводить к тому, что верификация либо будет выполняться очень долго, либо вообще не будет выполнена. Для решения данных проблем и достижения более высокой производительности сегодня существует ряд специальных средств и методов, которые за счет определенных манипуляций над моделью системы и/или над требованиями к ней позволяют добиться приемлемой производитель- ности [5–7]. В частности, одним из инструментов повышения эффективности выполнения верификации является предложенный в работе [8] метод абстракции и унификации RLTL-моделей (Recursive Linear Temporal Logic). В данной статье авторами предложен принципиально иной подход к повышению производи- тельности процесса верификации, который явля- ется результатом использования предложенной в [9] новой нотации LTL, обозначаемой как RLTL. Показана возможность выполнения на базе RLTL и самого процесса верификации, что позволит упростить алгоритм верификации методом Model Checking и привести его к виду, представленному на рисунке 2.
RLTL-нотация Рассмотрим представления основных базовых конструкций логики LTL, заданных в RLTL-нотации: LTL RLTL φ1 ∨ φ2 φ1 + φ2 φ1 ∧ φ2 {φ1, φ2} Xφ ∆ ∘ φ Запись {φ1, φ2} означает множество μ, состоящее из предикатов φ1 и φ2. В RLTL приняты следующий бозначения. ∘ – оператор продолжения (конкатенация выражений), что позволяет использовать оператор X в неявном виде, а также упростить его восприятие, в частности, запись μ1 ∘ μ2 будет пониматься как «μ2 следует за μ1». μ – множество выполнимых на конкретном этапе вычислительного процесса атомарных предикатов, задающих те или иные свойства системы. ∆ – предикат неопределенности, задающий неопределенное множество свойств системы μ, выполнимых на конкретном этапе вычислительного процесса. Отрицанием предиката неопределенности является некоторое другое неопределенное подмножество свойств μ', а отрицанием отрица- ния – некоторое третье неопределенное подмноже- ство μ''. Таким образом, отрицание предиката неопределенности является неполным, а каждое последующее отрицание дает неопределенное подмножество атомарных предикатов. Каждое из этих подмножеств ввиду своей неопределенности также может быть обозначено через ∆. ⊥ – оператор остановки вычислительного процесса. Это означает, что, как только данный оператор встречается в конкретный момент времени вычислительного процесса, в дальнейшем ни одно свойство системы не будет выполнено. Сформулируем основные аксиомы нотации RLTL:
Правила вывода в RLTL: R1. ˥∆ → ∆. Лемма 1. Оператор F логики LTL, рекурсивное представление которого задано как Fq = q ∨ X(Fq), может быть представлен в RLTL-нотации в виде F' = q + ∆ ∘ F'. Доказательство. Обозначим Fq через F'. Тогда F' = Fq = q ∨ X(Fq) = q ∨ X(F'). Отсюда, в соответствии с правилами представления формул LTL в RLTL, получаем: F' = q + ∆ ∘ F'. ■ Лемма 2. Оператор G логики LTL, рекурсивное представление которого задано как Gq = q ∧ X(Gq), может быть представлен в RLTL-нотации в виде F' = q ∘ F'. Доказательство. Обозначим Gq через F'. Тогда F' = Gq = q ∧ X(Gq) = q ∧ X(F'). Отсюда, в соответствии с правилами представления формул LTL в RLTL, получаем F' = {q, ∆ ∘ F'} = [A14] = q ∘ F'. ■ Лемма 3. Оператор U логики LTL, рекурсивное представление которого задано как pUq = q ∨ (p ∧ ∧ X(pUq)), может быть представлен в RLTL-нотации в виде F' = q + p ∘ F'. Доказательство. Обозначим pUq через F'. Тогда F' = pUq = q ∨ (p ∧ X(pUq)) = q ∨ (p ∧ X(F')). Отсюда, в соответствии с правилами представления формул LTL в RLTL, получаем: F' = q + {p, ∆ ∘ F'} = [A14] = q + p ∘ F'. ■ Построение синхронной композиции двух систем рекурсивных уравнений Идея верификации моделей систем, заданных на базе RLTL-нотации, практически ничем не отличается от верификации систем, заданных в виде автоматов Бюхи. Для того чтобы проверить, выполняется ли целевое требование, также заданное с помощью RLTL, на модели системы или нет, необходимо запустить две системы синхронно (модель и требование к ней) и следить за процессом их синхронной работы. Система, работающая синхронно, осуществляет переход в следующее состояние по некоторому символу p тогда и только тогда, когда вторая система также может выполнить переход из своего текущего состояния в некоторое новое состояние по символу p. Сформулируем основные аксиомы, необходимые для построения синхронной композиции двух систем рекурсивных уравнений: S1. μ1⊗μ2 = μ1, если μ1 ⊆ μ2, μ2, если μ2 ⊆ μ1, ⊥ в противном случае, S2. μ⊗⊥ = ⊥, S3. μ⊗∆ = μ, S4. (μ1 + μ2) ⊗ μ3 = (μ1 ⊗ μ3) + (μ1 ⊗ μ3), S5. (μ1 ∘ μ2) ⊗ (μ3 ∘ μ4) = (μ1⊗μ3) ∘ (μ2⊗μ4). Под символом ⊗ будем понимать оператор синхронной композиции. Все, что стоит справа или слева от данного оператора, должно выполняться синхронно, если это возможно. Пример построения синхронной композиции Дано. Система A: FA1 = a ∘ FA1 + b ∘ FA2, FA2 = c ∘ FA1. Система B: FB1 = c + ∆ ∘ FB1. Для построения синхронной композиции расширим систему A следующим образом, полагая, что в случае наступления события «c» система продолжит работать бесконечно долго, то есть зациклится: FB1 = c ∘ FB2 + ∆ ∘ FB1, FB2 = ∆ ∘ FB2. Решение. Построение синхронной композиции A⊗B: P1 = FA1⊗FB1 = = (a⊗c) ∘ (FA1⊗FB2) + (a⊗∆) ∘ (FA1⊗FB1) + +(b⊗c) ∘ (FA2⊗FB2) + (b⊗∆) ∘ (FA2⊗FB1) = =⊥ ∘ (FA1⊗FB2) + (a⊗∆) ∘ P1 + ⊥ ∘ (FA2⊗FB2) + + (b⊗∆) ∘ P2 = ⊥ + a ∘ P1 + ⊥ + b ∘ P2 = a ∘ P1 + b ∘ P2. P2 = FA2⊗FB1 = (c⊗c) ∘ (FA1⊗FB2) + (c⊗∆) ∘ (FA1⊗FB1) = = (c⊗c) ∘ P3 + (c⊗∆) ∘ P1 = c ∘ P3 + c ∘ P1. P3 = FA1⊗FB2= (a⊗∆) ∘ (FA1⊗FB2) + (b⊗∆) ∘ (FA2⊗FB2) = = a ∘ P3 + b ∘ P4. P4 = FA2⊗FB2=(c⊗∆) ∘ (FA1⊗FB2) = c ∘ P3. Конечная синхронная композиция: P1 = a ∘ P1 + b ∘ P2, P2 = c ∘ P3 + c ∘ P1, P3 = a ∘ P3 + b ∘ P4, P4 = c ∘ P3. Теорема 1. Пусть заданы две системы рекурсивных уравнений A и B, где P11, P12, …, P1n – множество метапеременных системы A; P21, P22, …, P2m – множество метапеременных системы B. P1i = P2i = ∀i∀j ∃l ∊ N такое, что P1ij = P1e ∀i∀k ∃r ∊ M такое, что P2ik = P2r. Тогда синхронная композиция двух систем уравнений A и B, где P1 = P11 ⊗ P21, конечна. Доказательство. Обозначим через ξ(u, v) = P1u ⊗ P2v , (*) где u = 1, 2, …, n; v = 1, 2, …, m. Количество выражений ξ(u, v) конечно. По построении синхронной композиции имеем ξ(u, v) = = = Верификация Для верификации с помощью RLTL необходимо наличие модели M на базе RLTL, а также проверяемое относительно нее требование φ, заданное на базе LTL. Для проверки выполнимости в системе заданного требования φ, как и в алгоритме верификации формул логики линейного времени, будет использовано обратное требование ⌉φ. Главным и самым важным отличием предлагаемого алгоритма от алгоритма верификации формул LTL является то, что верификация на базе RLTL более производительная, поскольку не требуется преобразовывать модель и обратное к ней требование в автоматы Бюхи. При этом осуществляется лишь преобразование обратного требования, заданного с помощью LTL, в RLTL-представление. Переход от LTL к RLTL является тривиальным и выполняется по описанным выше правилам и аксиомам в отличие от алгоритмов перехода от LTL к автоматам Бюхи, которые, как сказано в [1], зачастую выдают автоматы Бюхи экспоненциальной сложности относительно длины формулы φ.
Ключевым процессом в RLTL-верификации, как и в алгоритме верификации формул LTL, является процесс построения синхронной композиции. После того как будет построена композиция двух систем в соответствии с методом, представленным ранее, необходимо выполнить оценку результатов данного процесса. Чтобы исходное требование φ оказалось невыполнимым для модели M, достаточно найти любую ветку вычислительного процесса M, на которой выполняется обратное требование ⌉φ. Если такая ветка существует, она и будет искомым контрпримером. Обратное требование ⌉φ выполнимо для композиции M⊗⌉φ на некотором ее вычислительном пути тогда и только тогда, когда в M⊗⌉φ присутствуют все уравнения из ⌉φ. Пример 2. Верификация модели. Дано. Модель системы (M): FA1 = a ∘ FA1 + b ∘ FA2, FA2 = c ∘ FA1. Проверяемое требование (φ) LTL: φ = Fc – когда-нибудь наступит «c». Обратное требование (⌉φ) LTL: ⌉φ = G⌉c – всегда будет «⌉c». Обратное требование (⌉φ) RLTL: F⌉B1 = ⌉c ∘ F⌉B1. Решение. Построение синхронной композиции M⊗⌉φ: P1 = FA1⊗F⌉B1 = =(a⊗⌉c) ∘ (FA1⊗F⌉B1) + (b⊗⌉c) ∘ (FA2⊗F⌉B1) = =(a⊗(∆\c)) ∘ (FA1⊗F⌉B1) + +(b⊗(∆\c)) ∘ (FA2⊗F⌉B1) = =a ∘ (FA1⊗F⌉B1) + b ∘ (FA2⊗F⌉B1) = a ∘ P1+ b ∘ P2. P2 = FA2⊗F⌉B1 = (c⊗⌉c) ∘ (FA1⊗F⌉B1) = = ⊥ ∘ FA1⊗F⌉B1 = ⊥. Конечная синхронная композиция: P1 = a ∘ P1+ b ∘ P2, P2 = ⊥. Результат: P1 = a ∘ P1. Проверяемое свойство ⌉φ выполняется на M, поскольку в M⊗⌉S в полной мере было реализовано свойство ⌉φ, а именно, его уравнение на одном из путей вычислительного процесса. Из этого следует, что на этом пути не реализуется φ. Значит, путь P1 → a → P1 → a → P1 … → a → P1 является контрпримером. Рассмотрим более содержательный пример, в котором будет выполняться проверка работы дымового извещателя. Для наглядности на рисунке 3 представлена его модель в виде автомата Бюхи, где a – режим готовности; b – срабатывание датчика дыма; с – опрос соседних датчиков; d – режим тревоги. Модель дымового извещателя на базе нотации RLTL будет иметь следующий вид: FA1 = a ∘ FA1 + b ∘ FA2, FA2 = c ∘ FA3, FA3 = d ∘ FA4 + a ∘ FA1, FA4 = d ∘ FA4 + a ∘ FA1. Проверяемое требование (φ) LTL: φ = = GF(b→Xc) – всегда, в случае наступления в будущем в некоторый момент времени события b, на следующем шаге будет выполнено событие с. Обратное требование (⌉φ) LTL: ⌉φ = FG(b ∧ ∧ X⌉c) – когда-нибудь наступит такой момент, что всегда будет наступать b на текущем шаге и на следующем шаге будет ⌉с. Обратное требование (⌉φ) RLTL: FB1 = b ∘ FB3 + ∆ ∘ FB1, FB2 = b ∘ FB3, FB3 = ⌉c ∘ FB2. Построение синхронной композиции M⊗⌉φ: P1 = FA1⊗FB1 = (a⊗b) ∘ (FA1⊗FB3) + (b⊗b) ∘ (FA2⊗FB3) + + (a⊗∆) ∘ (FA1⊗FB1) + (b⊗∆) ∘ (FA2⊗FB1) = = ⊥ ∘ (FA1⊗FB3) + b ∘ (FA2⊗FB3) + a ∘ (FA1⊗FB1) + + b ∘ (FA2⊗FB1) = = b ∘ (FA2⊗FB3) + a ∘ (FA1⊗FB1) + b ∘ (FA2⊗FB1) = = b ∘ P2 + a ∘ P1+ b ∘ P3. P2 = (FA2⊗FB3) = (c⊗⌉c) ∘ (FA3⊗FB2) = ⊥ ∘ (FA3⊗FB2) = ⊥. P3 = (FA2⊗FB1) = (c⊗b) ∘ (FA3⊗FB3) + + (c⊗∆) ∘ (FA3⊗FB1) = = ⊥ ∘ (FA3⊗FB3) + c ∘ (FA3⊗FB1) = = c ∘ (FA3⊗FB1) = c ∘ P4. P4 = (FA3⊗FB1) = (d⊗b) ∘ (FA4⊗FB3) + + (d⊗∆) ∘ (FA4⊗FB1) + (a⊗b) ∘ (FA1⊗FB3) + + (a⊗∆) ∘ (FA1⊗FB1) = = ⊥ ∘ (FA4⊗FB3) + d ∘ (FA4⊗FB1) + ⊥ ∘ (FA1⊗FB3) + + a ∘ (FA1⊗FB1) = d ∘ (FA4⊗FB1) + a ∘ (FA1⊗FB1) = = d ∘ P5 + a ∘ P1. P5 = (FA4⊗FB1) = (d⊗b) ∘ (FA4⊗FB3) + + (d⊗∆) ∘ (FA4⊗FB1) + (a⊗b) ∘ (FA1⊗FB3) + + (a⊗∆) ∘ (FA1⊗FB1) = = ⊥ ∘ (FA4⊗FB3) + d ∘ (FA4⊗FB1) + ⊥ ∘ (FA1⊗FB3) + + a ∘ (FA1⊗FB1) = d ∘ P5 + a ∘ P1. Конечная синхронная композиция: P1 = FA1⊗FB1 = b ∘ ⊥ + a ∘ (FA1⊗FB1) + b ∘ (FA2⊗FB1) = = a ∘ P1 + b ∘ P3. P3 = (FA2⊗FB1) = c ∘ (FA3⊗FB1) = c ∘ P4. P4 = (FA3⊗FB1) = d ∘ (FA4⊗FB1) + a ∘ (FA1⊗FB1) = = d ∘ P5 + a ∘ P1. P5 = (FA4⊗FB1) = d ∘ (FA4⊗FB1) + a ∘ (FA1⊗FB1) = = d ∘ P5 + a ∘ P1. Результат. Проверяемое свойство ⌉φ не выполняется на M, поскольку в композиции M⊗⌉S присутствуют не все уравнения из ⌉φ, а именно, нет уравнений FB2 и FB3. Таким образом, исходное требование φ выполнимо на M. Заключение В статье предложен и подробно рассмотрен новый алгоритм верификации для метода Model Checking на базе нотации RLTL для верификации формул логики линейного времени. Данный алгоритм во многом схож с алгоритмом верификации формул LTL, поскольку использует аналогичные принципы и подход к решению задачи верификации. Однако он имеет особенность – позволяет сократить число подготовительных этапов, необходимых для верификации, тем самым способствуя повышению производительности метода. Работа предложенного алгоритма подробно рассмотрена на конкретных примерах с описанием всех этапов и их теоретической базы. Авторы считают, что он может выступить в качестве более производительной альтернативы существующему, а RLTL-нотация может использоваться в качестве основной структуры данных, на базе которой будут задаваться как модели верифицируемых систем, так и требования к ним. В целом же такой подход должен способствовать общему повышению быстродействия метода Model Checking за счет снижения сложности алгоритма верификации и использования единой структуры данных. Литература 1. Карпов Ю.Г. Model Checking. Верификация параллельных и распределенных программных систем. СПб: БХВ-Петербург, 2010. 552 с. 2. Кораблин Ю.П. Семантика языков распределенного программирования; [под ред. В.П. Кутепова]. М.: Изд-во МЭИ, 1996. 102 с. 3. Kroger F., Merz S. Temporal logic and state systems. Springer, 2008, 436 p. 4. Manna Z., Pnueli A. The temporal logic of reactive and concurrent systems: specification. Springer, 1992, 427 p. 5. Кларк Э.М., Грамберг О., Пелед Д. Верификация моделей программ. Model Checking. М.: Изд-во МЦНМО, 2002. 416 с. 6. Gerard J. Holzman. An analysis of bitstate hashing. Proc. 15th Int. Conf. on Protocol Specification, Testing, and Verification, 1998, pp. 301–314. 7. Ernst-Rudiger Olderog, Krzysztof R. Apt. Fairness in parallel programs: the transformational approach. ACM Trans. Program. Lang. Syst., 1988, vol. 10, no. 3, pp. 420–455. 8. Шипов А.А., Кораблин Ю.П. Построение моделей систем на базе эквациональной характеристики формул LTL // Программные продукты и системы. 2017. № 1. С. 61–66. 9. Шипов А.А., Кораблин Ю.П. Эквациональная характеристика формул LTL // Программные продукты и системы. 2015. № 4. С. 175–179. |

 ∘ P1ij, где N = {1, 2, …, n}.
∘ P1ij, где N = {1, 2, …, n}. ∘ P2ik, где M = {1, 2, …, m}.
∘ P2ik, где M = {1, 2, …, m}. ∘ P1uj ⊗
∘ P1uj ⊗  ∘ P2vk =
∘ P2vk = ∘ (P1uj ⊗ P2vk) =
∘ (P1uj ⊗ P2vk) =
http://swsys.ru/index.php?page=article&id=4315&lang=&lang=%E2%8C%A9=en&like=1 |
|
Perhaps, you might be interested in the following articles of similar topics:
- Построение моделей систем на базе эквациональной характеристики формул LTL
- Эквациональная характеристика формул LTL
- Унифицированное представление формул логик LTL и CTL системами рекурсивных уравнений
- Метод ограничений верифицируемых моделей
- Метод распределенного анализа свойств верифицируемых моделей