Алгоритм и программная реализация синтеза модели объекта испытаний на основе решения уравнения непараметрической идентификации
| Гусеница Я.Н. (yaromir226@gmail.com ) - Военный инновационный технополис «ЭРА» (начальник испытательной лаборатории информатики и вычислительной техники), Анапа, Россия, кандидат технических наук, Мингачев Э.Р. (era_otd1@mil.ru) - Военный инновационный технополис «ЭРА» (старший оператор научной роты), Анапа, Россия, Исхаков Н.У. (era_otd1@mil.ru) - Военный инновационный технополис «ЭРА» (старший оператор научной роты), Анапа, Россия, Колоколов М.И. (era_otd1@mil.ru) - Военный инновационный технополис «ЭРА» (оператор научной роты), Анапа, Россия | |
| Ключевые слова: случайные процессы, динамическая система, непараметрическая идентификация, математическая модель, объект испытаний |
|
| Keywords: stochastic processes, dynamic system modeling, non-parametric identification, mathematical model, test object |
|
|
|
|
Для современных испытаний характерны значительная продолжительность, сложность, трудоемкость, высокая стоимость, наличие ограничений по воспроизведению всего комплекса условий функционирования испытываемого объекта [1]. Например, стоимость проведения испытаний ракетно-космической техники составляет от 50 до 80 % общих затрат на ее разработку, ракетно-артиллерийского вооружения – от 45 до 60 % [2]. Поэтому в настоящее время наблюдается тенденция к сокращению объема испытаний. Одним из подходов, хорошо зарекомендовавших себя на практике при проведении ограниченного объема испытаний, является опытно-теоретический метод. Он предполагает проведение расчетов на математических моделях объекта испытаний в сочетании с натурными экспериментами [3, 4]. При этом результаты натурных экспериментов используются в качестве исходных данных для моделирования, а также для проверки правильности объекта испытаний [5, 6]. Основным достоинством метода является то, что он позволяет обеспечить высокую полноту результатов испытаний [7]. Однако, поскольку достоверность результатов испытаний зависит от адекватности используемых моделей, для его применения необходима идентификация параметров этих моделей. Целью настоящей работы являются разработка и программная реализация алгоритма синтеза модели объекта испытаний на основе решения уравнения непараметрической идентификации. Структура модели объектаиспытаний При реализации опытно-теоретического метода важное место отводится разработке математической модели объекта испытаний, которая в общем виде представляет собой вектор тактико-технических характеристик:
где yi(t) – i-я тактико-техническая характеристика; K – общее количество тактико-технических характеристик. Каждая i-я тактико-техническая характеристика yi(t) зависит от различных параметров: yi(t) = f(xj, t), где xj(t) – j-й параметр, определяющий значение i-й тактико-технической характеристики объекта испытаний. Данная зависимость может быть определена на основе интегрального уравнения Дюамеля:
где h(t) – неизвестная весовая функция, позволяющая определять y(t) при произвольном значении x(t). Учитывая, что значение i-й тактико-технической характеристики зависит от нескольких параметров, выражение (1) можно представить следующим образом:
где L – общее количество параметров. Модель объекта испытаний представляет собой матрицу H[KL](t), элементами которой являются весовые функции hij(t) (табл. 1).
Важное место в синтезе модели объекта испытаний отводится решению уравнения непараметрической идентификации, которое при наличии по одному входному и выходному случайным сигналам в общем виде будет
где Kyx(t) – взаимно-корреляционная функция входного x(t) и выходного y(t) сигналов; Kxx(t) – автокорреляционная функция входного x(t) сигнала.
Содержание алгоритма Для нахождения элементов матрицы H[KL](t) (табл. 1) необходимо решить уравнение непараметрической идентификации относительно соответствующих входного и выходного сигналов. Решение проходит в несколько этапов. 1. Вычисление автокорреляционной функции Kxx(t) входного x(t) сигнала и взаимно-кор-реляционной функции Kyx(t) входного x(t) и выходного y(t) сигналов. 2. Нормализация функций Kxx(t) и Kyx(t), то есть их перенос в положительную ось и приведение области значений от 0 до 1. В результате получаются нормализованные функции Fxx(t) и Fyx(t). 3. Вычисление гипердельтной аппроксимации функций Fxx(t) и Fyx(t) по формуле Для получения вероятностей Сi и параметров Ti на основе нормализованных функций Fxx(t) и Fyx(t) рассчитываются начальные моменты случайной величины νi. Далее решается система уравнений относительно переменных Сi и Ti:
где νi – i-й начальный момент случайной величины, распределенной с плотностью вероятности f(t); N – степень гипердельтной аппроксимации (точность приближения). Для степеней гипердельтной аппроксимации N > 2 система решается с использованием численных методов. В данной работе применяется метод Ньютона–Рафсона. В результате получаются аппроксимированные плотности распределения вероятностей fΔxx(t) и fΔyx(t). 4. Нахождение функций распределения на основе вычисленных плотностей распределения вероятностей:
5. Нахождение изображений по Лапласу полученных функций:
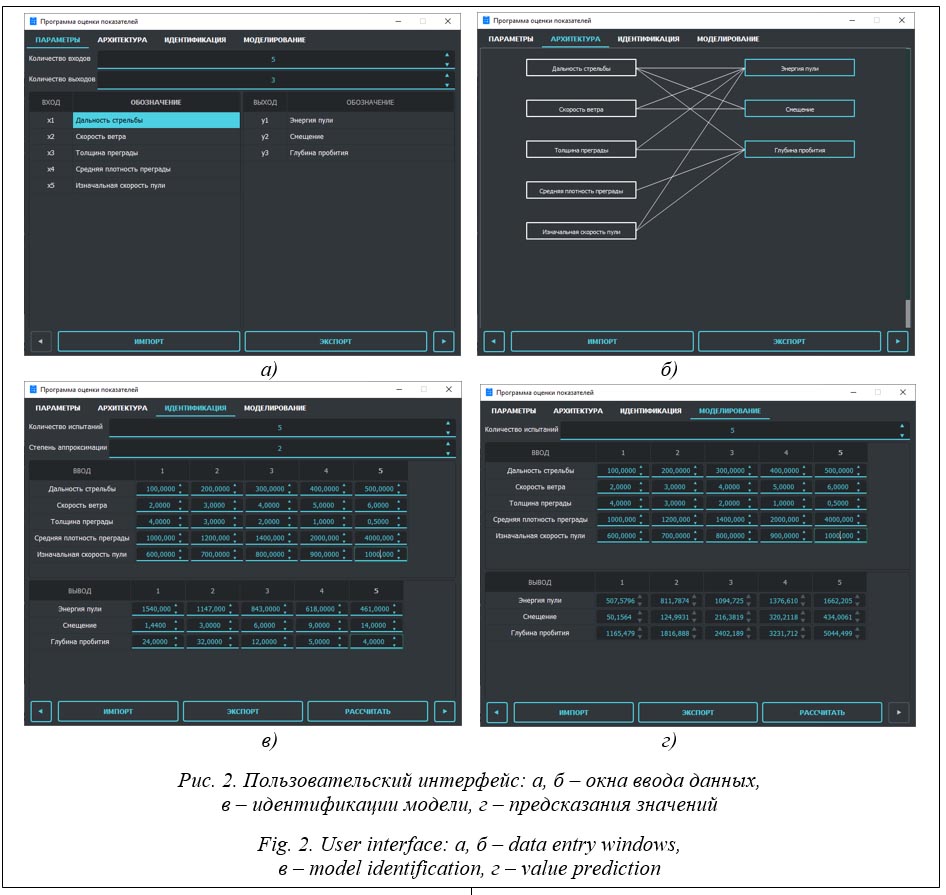
и весовой функции: 6. Нахождение весовой функции с использованием приближенного способа обращения преобразования Лапласа: h(t) = sh*(s) при s = 1/t. В результате получается весовая функция h(t) для входного x(t) и выходного y(t) сигналов (тактико-технических характеристик). Данная процедура повторяется для всех пар входных и выходных сигналов – элементов матрицы весовых функций H[KL](t). Таким образом, происходит идентификация модели объекта испытаний. Полученная матрица (модель) позволяет при произвольном значении l-го параметра xl(t) предсказывать k-ю тактико-техническую характеристику yk(t). Для этого применяются формулы интегрального уравнения Дюамеля (3) и его модификации для нескольких входных параметров (4). Программная реализация алгоритма На основе предложенного алгоритма с использованием языков программирования C++ (стандарта C++17) и Python (версии 3.11) разработана математическая библиотека идентификации модели объекта испытаний. Как и классические модели машинного обучения, модель объекта испытаний является C++/Python объектом с методами fit для обучения модели на выборке и predict для вычисления предсказания значений параметров [16]. Для демонстрации работы модели и автоматизации процесса идентификации модели объекта испытаний разработано приложение с графическим пользовательским интерфейсом. Приложение написано на языке Python (версии 3.11) с использованием библиотеки PyQt5 (5.15.7) для реализации графического интерфейса. Приложение состоит из двух частей – пользовательского интерфейса (frontend), реализующего взаимодействие с пользователем, и расчетного блока (backend), обеспечивающего автоматизацию идентификации модели объекта испытаний. Расчетный блок включает модули Hyperdelta для решения уравнения непараметрической идентификации по алгоритму и NewtonRaphson для численного решения системы уравнений (4) по методу Ньютона–Рафсона.
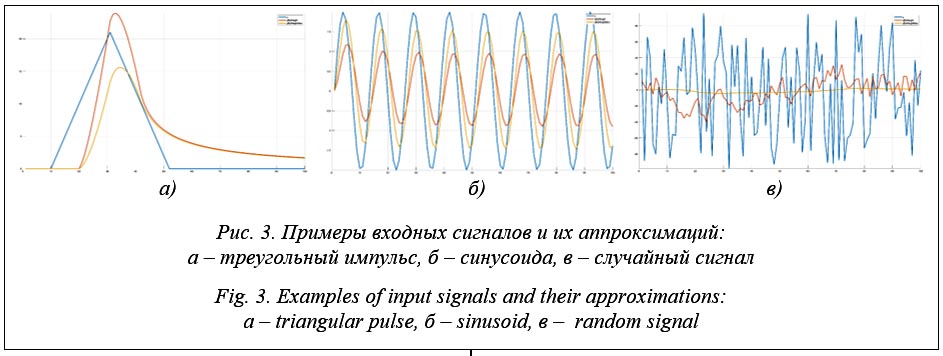
Приложение позволяет выполнять следующие функции. 1. Задавать наборы входных xi(t) (параметров) и выходных yj(t) сигналов (тактико-техни-ческих характеристик) и их взаимосвязи (рис. 2a–в). 2. Идентифицировать модель объекта испытаний в виде матрицы H[KL](t) весовых функций hij(t) с необходимой точностью аппроксимации (рис. 2в). 3. Вычислять предсказания относительно характеристик объекта испытаний – значения выходных y'j(t) сигналов для произвольных входных x'i(t) (рис. 2г). Результаты
Данный пример иллюстрирует следующие тенденции. Достаточно точно аппроксимируются простые непериодические (a) и периодические (б) сигналы. Случайные сигналы без четкого распределения (в) упрощаются до средних значений. При этом с ростом количества начальных моментов гипердельтной аппроксимации увеличивается амплитуда результирующих значений. Для получения оценки быстродействия разработанного алгоритма нормировалось общее время расчетов и количество итераций. Расчеты производились по 10 раз для различного количества начальных моментов гипердельтной аппроксимации. Результаты (средние, минимальные и максимальные значения измеряемых показателей) представлены в таблице 2.
Заключение В настоящей работе представлен алгоритм синтеза модели объекта испытаний. Алгоритм основан на методе решения уравнения непараметрической идентификации динамической системы, в отличие от существующих не требующем исчерпывающей информации об объекте испытаний и существенных затрат вычислительных ресурсов. Математическая библиотека идентификации модели объекта испытаний и приложение с графическим пользовательским интерфейсом для автоматизации расчетов реализованы с помощью языков C++ и Python. Полученные результаты позволяют обеспечить многофакторную оценку динамических параметров объектов испытаний и могут быть применены при проверке соответствия тактико-технических характеристик предъявляемым требованиям. Список литературы
Reference List
|
 , (2)
, (2)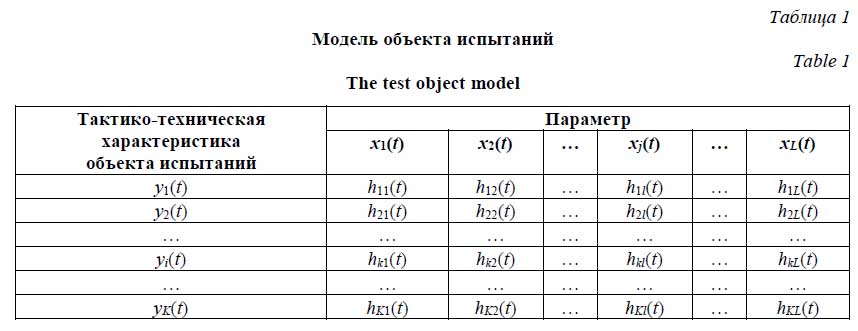

 (4)
(4)

http://swsys.ru/index.php?page=article&id=5007&lang=%E2%8C%A9=en |
|
Perhaps, you might be interested in the following articles of similar topics:
- Использование программного обеспечения для определения и прогнозирования показателей качества экструдированной продукции
- Модели планирования производства изделий, основанных на нанотехнологиях
- Самарская школа профессора С.А. Прохорова по прикладному анализу случайных процессов
- Математические модели реограмм состояния в программах Table Curve 2d/3d как основа интеллектуальной системы управления процессами структурирования многокомпонентных эластомерных композитов
- Информационно-расчетные системы для определения лазерно-локационных характеристик объектов