Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Основные системотехнические решения по реализации распределенных вычислительных комплексов АСУ ГПС механообрабатывающих производств на базе СМ ЭВМ
Аннотация:
Abstract:
| Автор: Пилипенко В.А. () - | |
| Ключевое слово: |
|
| Ключевое слово: |
|
| Количество просмотров: 11862 |
Версия для печати |
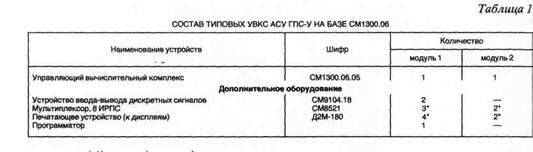
На современном этапе автоматизации машиностроительных предприятий гибкие производственные системы (ГПС) охватывают, как правило, два функциональных уровня производства: цех (ГПС-Ц) и участок (ГПС-У). В скором времени должны появиться производственные системы с охватом автоматизацией замкнутых производств или целых предприятий — гибкие автоматизированные производства (ГАП) [1]. ГПС первого уровня (ГПС-У) включает в себя: • от 2 до 15 робототехнических комплексов (РТК) или гибких производственных модулей (ГПМ) типа «обрабатывающий центр»; • 1-2 автоматизированных склада с позициями комплектования деталей и инструментов; • транспортную систему с накопителями; • средства вычислительной техники АСУ ГПС-У. Все используемое оборудование имеет встроенные локальные системы управления (ЛСУ). ЛСУ РТК или ГПМ представляют собой в основном системы ЧПУ типа CNC. ЛСУ транспортной и складской систем реализуются на базе управляющих микроЭВМ или систем ЧПУ типа CNC. ГПС второго уровня (ГПС-Ц) объединяет несколько ГПС-У и включает следующие эле- • транспортная система цеха; • складская система цеха; • средства вычислительной техники АСУ ГПС-Ц. Состав, структура и функции АСУ ГПС подробно описаны в [2, 3]. Приведем перечень подсистем АСУ ГПС, необходимых для логического построения КТС АСУ ГПС. АСУ ГПС рассматриваемых уровней включает следующие подсистемы автоматизации: • технологическая подготовка производства (ТИП); • управление технологическим процессом производства (УТПП): • управление транспортно-складской системой (УТСС); • • оперативно-календарное планирование (ОКП). Первые четыре подсистемы реализуются как на первом, так и втором уровнях АСУ ГПС, подсистема ОКП реализуется обычно на втором уровне ГПС. АСУ ГПС может иметь функциональные (и технические) связи с АСУ предприятием (АСУП) и системой автоматизированного проектирования (САПР). Конфигурация КТС зависит от следующих факторов: • функции и задачи реализуемых подсистем; • состав и топология технологического и транспортно-складского оборудования ГПС; • режимы и технология обработки; • организация производства. Для реализации ГПС целесообразно использовать модульный принцип построения КТС, который позволит обеспечить гибкость систем, реализовать функции АСУ ГПС в различных наборах подсистем и задач, оптимизировать стоимость используемого КТС и облегчить выбор требуемой конфигурации КТС. На рисунке приведена функциональная структура КТС АСУ ГПС. На первом уровне КТС решает задачи управления ГПС-У и в зависимости от параметров объекта управления может быть реализован на базе одной или нескольких мини-или микро-ЭВМ, объединенных аппаратно-программными средствами обмена данными. На втором уровне КТС решает задачи управления ГПС-Ц и реализуется в виде УВК на базе мини-ЭВМ, имеющей непосредственную связь с АРМ технолога цеха и ЭВМ АСУ предприятия. К УВК второго уровня подключаются также АРМ диспетчера, управляющего и технического персонала цеха. Модульность КТС позволяет обеспечить гибкость при реализации проектов АСУ ГПС различного типа и размерности. Модули 1 и 2 (табл. I) реализуются на базе типового комплекса микроЭВМ СМ 1300.06.05. и предназначены для автоматизации функций ГПС-У. Модуль 1 обеспечивает управление транспортными средствами, контроль состояния перегрузочных позиций склада станочных модулей и обмен информацией с УВК второго уровня.
Модуль 2 обеспечивает передачу управляющих программ технологическому оборудованию по каналам связи и реализует функцию диагностики систем ЧПУ ГПМ. Количество модулей 2 определяется числом управляемых ГПМ. ЭВМ СМ1300.05 может управлять работой не более восьми ГПМ. Если последних больше, то в ГПС-У используется несколько модулей 2. При небольшом количестве ГПМ возможно объединение функций модулей 1 и 2 в первом модуле.
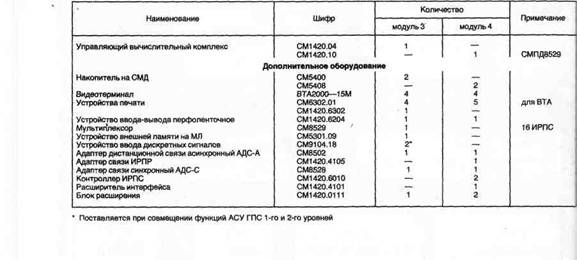
* Количество определяется потребностями участка Модули 3 и 4 (табл. 2) реализованы на базе мини-ЭВМ СМ1420 и предназначены для реализации функций и задач АСУ-Ц. Различие в составе модулей определяется их информационными нагрузками. Так, модуль 3 используется при реализации АСУ ГПС цеха, включающего участки малой размерности и в ряде случаев может совмещать функции обоих уровней управления. Модуль 4 предназначен для реализации АСУ ГПС-У с большой информационной нагрузкой в системах, охватывающих несколько ГПС-У с большим количеством оборудования и развитыми транспортно-складскими системами. Модули 3 и 4 должны иметь связь с АРМ на базе терминалов или персональных ЭВМ участков подготовки производства, технолога, диспетчера цеха, руководящего персонала цеха и с ЭВМ первого уровня.
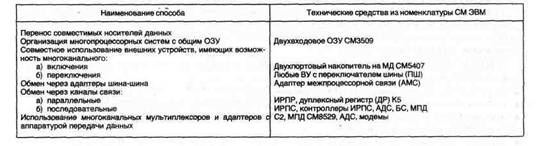
Таблица 2 Одной из важнейших проблем реализации КТС АСУ ГПС является их объединение в многомашинные распределенные вычислительные комплексы. Кроме ЭВМ, входящих в состав модулей 1*4, в многомашинный комплекс входят и микроЭВМ систем ЧПУ и ЛСУ транспортно-складскими объектами. Системы ЧПУ, входящие в состав ГПС, представляют собой устройства класса CNC на базе встроенных микроЭВМ «Электроника-60» (например 2Р32, 2С42, 2С85 и т. п.) или устройства ЧПУ производства фирм Фанук, Бош и др. Для систем ЧПУ отечественного и зарубежного производства, не имеющих аппаратных и программных средств связи с УВК, рекомендуются следующие методы организации связи: • использование совместимых носителей информации (например перфоленты); метод прост, однако малонадежен, не обеспечивает оперативности управления и требует привлечения дополнительного персонала; • использование для подключения к УВК интерфейсов СЧПУ, предназначенных для других целей (например интерфейс ИРПР для подключения перфосчитывателя); метод может быть рекомендован как для отечественных, так и для зарубежных СЧПУ; Таблица 3 СПОСОБЫ СОПРЯЖЕНИЯ ЭВМ В АСУ ГПС
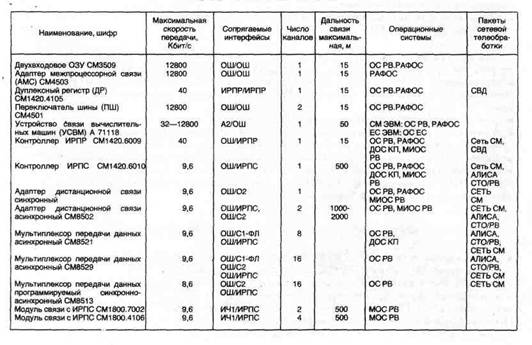
• организация в СЧПУ библиотеки УП с присвоением каждой из них номера; вызов требуемой УП осуществляет УВК через У СО и командо-аппарат СЧПУ; для отечественных СЧПУ метод непригоден из-за малого объема ОЗУ и может быть рекомендован только для зарубежных СЧПУ; • использование нестандартных средств связи СЧПУ с УВК [4]. УС ЭВМ обеспечивает обмен данными между ЭВМ СМ-4 (СМ1420), «Электроника-60» и СЧПУ на базе «Электроника-60» в режиме «точка-точка» с помощью последовательного канала типа ИРПС и позволяет создавать ЛВС для АСУ ГПС с топологией типа «звезда» или «дерево». КС представляет собой набор блоков связи, обеспечивающий высокоско- Таблица4
остной обмен данными между ЭВМ СМ-4 (СМ1420) и СЧПУ 2С85 и позволяющий создавать ЛВС в составе АСУ ГПС с топологией типа «звезда». Способы сопряжения ЭВМ первого и второго уровней АСУ ГПС, а также их аппаратная реализация приведены в табл. 3. Для связи ЭВМ (до 500 м) предназначены средства с интерфейсом ИРПС и стык С2 (БС s АДС, МПД, АДС-А, АДС). Остальные средства (табл. 3) могут обеспечивать обмен информацией на расстоянии до 15 м. Для обмена информацией в распределенных многомашинных комплексах используется программное обеспечение сетевой телеобработки: ПП СВД, АЛИСА, СТО/РВ и СЕТЬ СМ, функционирующих с ОС РВ. СВД (система виртуального доступа) [5] позволяет обращаться из одной ЭВМ к данным и внешним устройствам другой ЭВМ, входящей в состав многомашинного комплекса. СВД дает возможность создавать сети типа «звезда», «кольцо», «дерево» на ЭВМ типа СМ-4. СМ1300, СМ1420. ЭВМ могут быть связаны между собой средствами синхронного и асинхронного типов. Настоящая версия СВД работает только с дуплексным регистром К5СМ и может быть рекомендована только для сосредоточенных многомашинных комплексов с удалением ЭВМ не более 15 м. АЛИСА (адаптивная линейная иерархическая сетевая архитектура) выполняет следующие функции: • загрузка ОС периферийной ЭВМ с дисков головной ЭВМ по аппаратному КС; • загрузка программ из головной ЭВМ в периферийную по аппаратному КС; • многозадачный режим работы в головной и периферийной ЭВМ, доступ задач периферийной ЭВМ к файлам головной; • загрузку нерезидентных задач под управлением ОС периферийной ЭВМ с дисков головной ЭВМ; • доступ пользователя с терминала периферийной ЭВМ к ресурсам головной ЭВМ. АЛИСА является самой экономичной системой относительно ресурсов памяти ЭВМ и может быть рекомендована для КТС ГПС-У с ЧПУ ГПМ, характеризующихся малой емкостью ОЗУ [6]. Применение для связи стандартных аппаратных средств с интерфейсом ИРПС значительно снижает быстродействие системы. Для повышения быстродействия с 300 бит/сек до 19,6 Кбит/сек рекомендуется применение контроллеров УС [4]. ПП СТО/РВ [7] (сетевая телеобработка) предназначен для организации однородных сетей на базе мини-ЭВМ типа СМ-4. Пакет требует ОЗУ емкостью более 128К, что не позволяет использовать его в системах, включающих ЧПУ и микроЭВМ Л СУ. ПП СЕТЬ СМ используется для создания однородных сетей произвольной размерности и архитектуры, является развитием ПП СТО/РВ и позволяет создавать сети коммутации пакетов. При использовании этого пакета в сетях, включающих ЧПУ, имеются трудности, аналогичные ПП СТО/РВ. Анализ перечисленных ППП показывает, что их применение для связи с УЧПУ требует разработки программных средств, включающих следующие элементы: • язык обмена, который может существенно меняться в зависимости от СЧПУ и технологического оборудования, а также от информации, которая будет передаваться по канат-связи; • драйвер (программа обслуживания) КС; • программный модуль связи драйвера КС с ОС РВ; при использовании терминального драйвера разработка модуля не требуется, так как он входит в ОС РВ; • драйвер КС как внешнее устройство для процессора встроенной микроЭВМ СЧПУ; • программный модуль связи драйвера КС с системным программным обеспечением (СПО) СЧПУ (поскольку СПО СЧПУ зависит от объекта управления и типа СЧПУ, создать универсальный модуль невозможно). Проведенные исследования позволили определить два пути типизации программного модуля связи: • использование в качестве СПО УЧПУ универсальной ОС (например бездисковой ОС РВ и стандартного ПП связи (АЛИСА). Этот путь реализован в АСУ ГПС механообрабатывающего участка. Связь УЧПУ транспортно-накопительной системы с УВК СМ1420 осуществляется следующим образом: при включении системы производится передача из УВК во встроенную в УЧПУ микроЭВМ «Электроника-60» загрузчика ОС, а затем по каналу связи (КС) загружается усеченная версия ОС РВ, хранимая во внешней памяти УВК. В качестве драйвера КС используется терминальный драйвер; что позволяет осуществлять далее загрузку управляющих программ из УВК в СЧПУ и управление последними, а также организовать доступ СЧПУ к ресурсам УВК; • использование типового языка обмена и включение при разработке СЧПУ в СПО драйвера КС и программного модуля связи драйвера КС с СПО СЧПУ, учитывающего требования, изложенные в [8]. Примером программного языка обмена может служить [9]. Средства комплексирования многомашинных комплексов и программные средства поддержки их функционирования приведены в табл. 4. Список литературы 1. ГОСТ 26228-85. Системы производственные гибкие. Термины и определения. 2. РТМ 2Н93-85. Состав, структура и порядок создания АСУ ГПС. М.: ВНИИТЭМР, 1985. 3. Гамзатов X. Г. Типовая функциональная структура интегрированной АСУ ГПС. — В кн.: Пути типизации АСУ ГПС. М.: ВНИИТЭМР, 1987, с. 9-17. 4. Кучеренко Е. И. и др. Организация связи систем ЧПУ оборудования с УВК в ГПС. — В кн.: Пути типизации АСУ ГПС — М.: ВНИИТЭМР, 1987, с. 26-32. 5. Каталог программных средств ЦФАП АСУ. — НПО «Центрпрограммсистем», Калинин, 1985. 6. Елинер Э. И. Локальная вычислительная сеть ВЦКП СМ на базе сетевого программного обеспечения АЛИСА. Новосибирск, Препринт, 1986. 7. Васильев Г. П. и др. Программное обеспечение сетей ЭВМ. — М.: Финансы и статистика, 1983. 8. РТМ 2Н90-18-84. Станки металлорежущие с ПУ. Параметры сопряжения систем ПУ с ЭВМ и периферийными устройствами ввода-вывода. — М.: ЭНИМС, 1984. 9. МУ25 741 -85. АСУ ГПС. Каналы связи ЭВМ-ЧПУ. Технические средства, язык общения, программное обеспечение. М.: ИНЭУМ, 1985. |
 управление инструментальным обеспечением (УИО);
управление инструментальным обеспечением (УИО);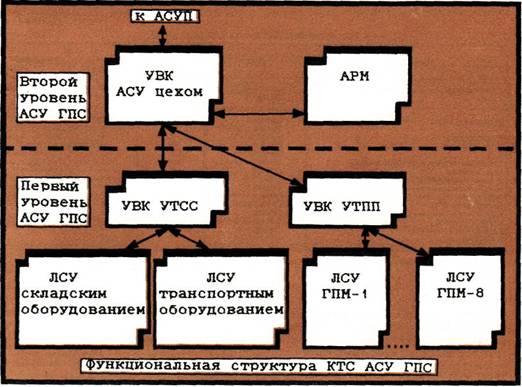
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=1385 |
Версия для печати |
| Статья опубликована в выпуске журнала № 4 за 1989 год. |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Оптимизация структуры базы данных информационной системы ПАТЕНТ
- Электронный глоссарий
- Оптимизация обработки информационных запросов в СУБД
- Вычислительный интеллект: немонотонные логики и графическое представление знаний
- Информационная система оптимизации расписания доставки грузов от производителей сырья
Назад, к списку статей