Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Технология мягких вычислений в проектировании интеллектуальных систем управления
Аннотация:На конкретных типовых примерах моделей динамических объектов управления демонстрируется эффективность процессов управления в условиях неполноты информации о параметрах структуры объектов управления и непредвиденных (нештатных) ситуаций управления с применением оптимизатора баз знаний на мягких вычислениях. Показано, что использование его в обучении и непредвиденных ситуациях управления приводит к повышению уровня робастности структуры интеллектуальных систем управления.
Abstract:Effective control processes are demonstrated using Benchmarks of control object models in uncertainty of information about structure parameters and unpredicted control situations based on soft computing knowledge base optimizer (KBO). It is demonstrated that the using of KBO in learning situations and unpredicted control situations increasing robustness levels of intelligent control systems.
| Авторы: Мишин А.А. (a.mishin@ntpdubna.ru) - Научно-технологический парк «Дубна», г. Дубна, Добрынин В.Н. (a.mishin@ntpdubna.ru ) - Университет природы, общества и человека «Дубна», г. Дубна, кандидат технических наук, Литвинцева Л.В. (a.mishin@ntpdubna.ru) - Университет природы, общества и человека «Дубна», г. Дубна, кандидат физико-математических наук | |
| Ключевые слова: мягкие вычисления, интеллектуальные системы управления, робастность, оптимизатор баз знаний |
|
| Keywords: soft computing, intelligent control systems, robustness, knowledge base optimizer |
|
| Количество просмотров: 12311 |
Версия для печати Выпуск в формате PDF (4.03Мб) Скачать обложку в формате PDF (1.25Мб) |
В системах проектирования БЗ интеллектуальных систем управления (ИСУ) построение оптимальной структуры нечеткой нейронной сети (ННС) возложено на опытного эксперта. Но даже для него выбор модели нечеткого вывода и лингвистическое описание заданного обучающего сигнала вручную в сложных ситуациях управления является большой проблемой. Проблематичным остается также определение требуемого соотношения между точностью аппроксимации обучающего сигнала и необходимым уровнем робастности всей структуры ННС. Однако эти проблемы можно решить с помощью программных средств инструментария, названного оптимизатором БЗ (ОБЗ) [1, 2]. В данной статье рассматривается программная архитектура, принятая за основу ОБЗ. Внимание сконцентрировано и на описании конкретных результатов моделирования ИСУ сложными существенно-нелинейными, динамически неустойчивыми объектами управления (ОУ). Программная реализация оптимизатора БЗ Для построения ОБЗ ИСУ была выбрана модульная схема, которая подразумевает построение пользователем модели ИСУ из набора функциональных блоков, таких как модули ввода и вывода данных, лингвистических переменных, нечеткого вывода и других. При этом пользователь может произвольно соединять эти блоки, формируя модели сложных ИСУ. В основе модульной модели ИСУ лежат классы Model, Block и DataArchive. Класс Model инкапсулирует все объекты, необходимые для построения модели ИСУ, и обеспечивает взаимодействие между ними. Он отвечает за ведение списка имеющихся в модели ИСУ модулей, отслеживает корректность связей между ними, предоставляет интерфейсы для передачи данных модели для вычисления, а также получения результатов. Класс Block является базовым для реализаций различных модулей ИСУ. Он предоставляет общий интерфейс для проведения расчетов, а также поддерживает базовые функции, необходимые большинству модулей. Класс DataArchive обеспечивает хранение и извлечение данных, передаваемых внутри модели. В нем хранятся данные, порождаемые выходными портами всех модулей в системе, а также входные и выходные данные модели. В оптимизаторе реализованы два генетических алгоритма – обычный генетический алгоритм, обеспечивающий минимизацию вещественной целевой функции, а также алгоритм типа NSGA, находящий множество парето-оптимальных решений для задачи минимизации нескольких целевых функций. Эти алгоритмы могут использоваться с двумя типами хромосом, в которых кодирование решений происходит с помощью бинарной ДНК или набором вещественных чисел. Процесс оптимизации протекает следующим образом. Сначала выбирается объект для оптимизации и создается объект, реализующий опти- мизационный алгоритм. Параметры алгоритма запрашиваются у пользователя с помощью диалогового окна и соответствующего класса для обработки ввода пользователя. Хромосомы первого поколения по очереди декодируются оптимизируемым объектом, и для них вычисляются соответствующие значения функции полезности. После этого оптимизационный алгоритм создаетновое поколение, используя определенные генетические операции и сортировку хромосом на базе вычисленных значений функций полезности. Процесс продолжается до завершения оптимизации согласно выбранным пользователем условиям. Одной из основных проблем практического применения генетической оптимизации для создания ИСУ является необходимость проведе- ния большого числа вычислений функции полезности [3]. Время оптимизации может быть сокращено за счет применения оптимизации с использованием обучающего сигнала и математических моделей ОУ. На финальном этапе решения, показавшие себя достаточно хорошо на моделях, проверяются на реальном ОУ. Разработанный ОБЗ обеспечивает такие возможности, как · оптимизация по заданному обучающему сигналу; · оптимизация с использованием проверки работы ИСУ на модели, реализованной во внешней системе, или на ОУ; · проверка соответствия начального состояния ОУ некоторым заданным начальным условиям; · одновременная работа нескольких оптимизационных алгоритмов; · поиск и выявление повторных запросов на вычисление функции полезности с дальнейшим использованием значения, полученного при первой проверке, либо усреднением значения функции по результатам нескольких испытаний в зависимости от предпочтений пользователя; · приостановление оптимизации и продолжение ее в дальнейшем с помощью различных настроек алгоритмов или даже разных алгоритмов; · многократное тестирование решений с целью повышения точности измерения функции пригодности. Модульный подход к построению модели ИСУ диктует построение интерфейса пользователя в виде набора блоков и связей между ними. Пользователь может добавлять или удалять блоки, модифицировать связи между ними. Для обеспечения возможности создания интерфейсов различного типа ОБЗ был выполнен в виде библиотеки, содержащей основные функции оптимизатора, а также те части интерфейса, которые могут использоваться в разных проектах. Эта библиотека затем может применяться для создания ОБЗ с различными интерфейсами. Были разработаны два интерфейса: предусматривающий возможность манипулирования с блоками и связями между ними и предназначенный для создания ПИД-регуляторов. Во втором случае пользовательский интерфейс исключает доступ пользователя к блочной структуре модели. Пользователю предоставляется непосредственный доступ к управлению коэффициентами контроллеров и пространством поиска для оптимизации. Пример использования ОБЗ Рассмотрим результаты моделирования структур ИСУ с применением ОБЗ. Движение динамической системы «перевернутый маятник – каретка перемещения» описывается следующими уравнениями:
где g – ускорение свободного падения (9.8 м/сек2); mc – масса каретки; m – масса маятника; l – половина длины маятника; x(t) – стохастическое воздействие; u – управляющая сила, действующая на каретку. Уравнения для скорости производства энтропии в ОУ и ПИД-регуляторе имеют следующий вид:
Физической моделью рассматриваемой динамической системы (1) является мотоцикл с учетом биомеханических характеристик водителя или ее обобщение на трехмерный случай системы «одноколесный робот – велосипед». При наличии рэлеевского стохастического шума, действующего на каретку, и при наличии времени задержки сигнала в системе измерения положения маятника необходимо перевести маятник из начального положения в целевое вертикальное (q=0) и удерживать ОУ в заданном вертикальном положении. Зададим следующие значения параметров: mc=1; m=0.1; l=0.5; k=0.4; a1=0.1; a2=5 и начального положения [q0; Рассмотрим ИСУ, содержащую нечеткий ПИД-регулятор, управляющий движением маятника, с использованием разработанного инструментария ОБЗ.
Результаты моделирования движения системы в двух случаях управления: 1) – с помощью нечеткого регулятора, БЗ которого построена с использованием разработанного ОБЗ; 2) – с помощью классического ПИД-регулятора с коэффициентами усиления С точки зрения оптимизации системы автоматического управления по критериям качества управления, таким как минимум ошибки управления, минимум производства энтропии в объекте управления (то есть минимум тепловых потерь, потерь полезной работы и энергии), а также с учетом ограничений на управляющую силу ИСУ, разработанная на основе ОБЗ, является более эффективной, чем традиционные ПИД-регуляторы. Сравнение результатов движения маятника и каретки перемещения, управляющей силы, термодинамических характеристик ОУ и регуляторов (потери полезной работы), законов управления коэффициентами усиления нечеткого и традиционного ПИД-регуляторов проведено в следующих условиях: гауссовский шум, воздействующий на ОУ; время задержки в системе измерения, равное 0.002 сек. Результаты моделирования показывают, что построенная БЗ НР, управляющего движением перевернутого маятника, является робастной; с точки зрения критериев качества управления, таких как минимум ошибки управления, минимум производства энтропии в объекте управления и системе управления, а также с учетом минимума управляющей силы разработанная ИСУ эффективнее традиционных ПИД-регуляторов. Рассмотренная в статье архитектура ОБЗ позволила создать инструментарий для проектирования ИСУ сложной конфигурации. На основе предложенного инструментария ОБЗ могут быть рассмотрены актуальные задачи формирования БЗ для проектирования робастных НР, например, задача координационного управления коэффициентами усиления двух ПИД-регуляторов, представляющая самостоятельный интерес для теории и систем управления. Использование инструментария ОБЗ позволяет одновременно реализовать процесс проектирования робастных БЗ на основе алгоритмов обучения и адаптации. Литература 1. Litvintseva L.V., Takahashi K., Ulyanov S.S. [et al.]. Intelligent robust control design based on new types of computations. Note del Polo Ricerca, Universita degli Studi di Milano Publ., 2004. Vol. 60. 2. Сорокин С.В., Литвинцева Л.В., Ульянов С.В. Оптимизатор баз знаний на мягких вычислениях // Нечеткие системы и мягкие вычисления. 2008. № 1. 3. Ulyanov S.V. System and method for stochastic simulation of nonlinear dynamic systems with a high degree of freedom for soft computing applications. US patent № 2004/0039555 A1. 2004. |
 ,
, (1)
(1) . (2)
. (2) 0; z0;
0; z0;  0]=[10; 0.1; 0; 0]. Введем также ограничение на силу управления:
0]=[10; 0.1; 0; 0]. Введем также ограничение на силу управления:  .
.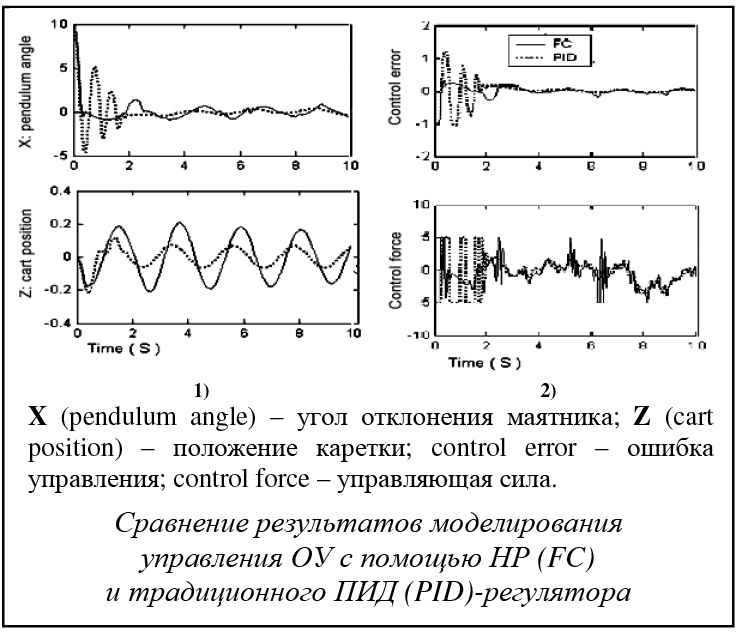
 , полученными усреднением коэффициентов усиления НР, показаны на рисунке.
, полученными усреднением коэффициентов усиления НР, показаны на рисунке.| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=2416 |
Версия для печати Выпуск в формате PDF (4.03Мб) Скачать обложку в формате PDF (1.25Мб) |
| Статья опубликована в выпуске журнала № 1 за 2010 год. |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Нечеткий регулятор со скользящим режимом на основе мягких вычислений
- Программный инструментарий проектирования баз знаний для интеллектуального управления
- Когнитивные регуляторы: технологии мягких вычислений и информационно-термодинамический закон самоорганизации интеллектуального управления
- Технологии мягких вычислений в интеллектуальном управлении
- Промышленная роботизированная интеллектуальная робастная система управления: применение технологий квантовых мягких вычислений и квантовой программной инженерии в неопределенных условиях управления
Назад, к списку статей