Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Программа исследования динамики систем управления
Аннотация:Разработаны программа для моделирования и исследования динамики систем управления и модуль связи Delphi с MATLAB. Перечислены особенности моделирования непосредственно в MATLAB и возникающие при этом трудности. Описаны возможности разработанной программы для моделирования и исследования динамики систем управления. Приведены примеры использования интерфейса программы.
Abstract:The software to modeling and researching of control systems dynamics is developed. The module of link between Delphi and MATLAB is described, some features and troubles of modeling in MATLAB is listed. Possibilities of software is conducted with examples of software interface using.
| Авторы: Бильфельд Н.В. (bilfeld@mail.ru) - Березниковский филиал Пермского государственного технического университета, г. Пермь, Россия | |
| Ключевые слова: программа, моделирование, динамика, регулирование |
|
| Keywords: software, modeling, dynamics, control |
|
| Количество просмотров: 13633 |
Версия для печати Выпуск в формате PDF (5.84Мб) Скачать обложку в формате PDF (1.43Мб) |
Для исследования динамики систем автоматического регулирования (САР) наиболее популярной является программа SIMULINK, входящая в состав интегрированной среды MATLAB.
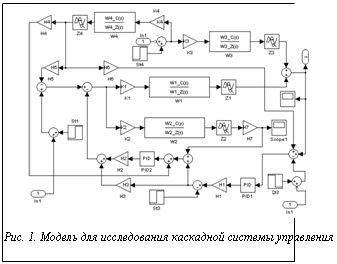
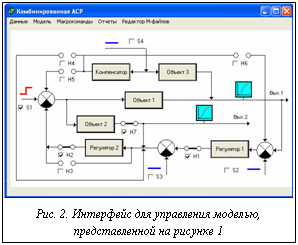
Для устранения данной проблемы разработана программа, ядром которой являются модуль связи Delphi и MATLAB, интегрирующая в себе ос- новные методы исследования САР, интерфейс которой представлен в терминах и понятиях, традиционных для систем автоматического регулирования. В частности, интерфейс модели для исследования комбинированных систем регулирования (рис. 1) имеет вид, приведенный на рисунке 2.
Запуск модели можно осуществлять циклически. При этом для любого параметра модели можно указать необходимое приращение. В частности, при щелчке по объекту открывается окно настроек, в котором указываются все его параметры и необходимые приращения (рис. 4). В группе управления графической информацией можно указать, каким образом выводить результаты, а также цвет и маркеры графиков. В качестве примера на рисунке 5 приведены графики переходных процессов, построенные в одном графическом окне для САР: · при отсутствии возмущающего воздействия; · при наличии возмущающего воздействия; · при компенсации возмущения с помощью интегрально-дифференцирующего звена. При этом пользователю нет необходимости помнить и вводить в соответствующие блоки передаточную функцию используемого компенсатора – она формируется автоматически при выборе необходимого звена из раскрывающегося списка (рис. 3). Не исключается задание пользователем любой передаточной функции компенсатора. При щелчке по блоку «компенсатор» открывается аналогичное окно настроек, как и при выборе объекта (рис. 4), в которое можно ввести любую передаточную функцию и в нем указать приращения ее параметров. Из рисунка 4 видно, что имеется возможность работы с буфером обмена, сохранения передаточных функций в файлах в различных форматах для обмена информацией с другими ранее разработанными программами и т.д.
В данной статье говорится лишь о некоторых возможностях разработанной программы. Кроме этого, в ней реализованы: · расчет показателей качества переходных процессов; · оптимизация настроечных параметров системы различными методами с возможностью графического отображения поверхности настроечных параметров; · построение практически всех частотных характеристик системы; · анализ системы в пространстве состояний с возможностью вывода матриц управляемости и наблюдаемости, а также вычисления рангов указанных матриц; · вывод передаточных функций замкнутой системы по управлению и возмущению. Использование разработанной программы значительно сокращает процесс моделирования систем управления и позволяет сосредоточить внимание на анализе полученных результатов. Круг применения данной программы может быть достаточно широким: в учебном процессе по ряду дисциплин, в инженерных, научных исследованиях. Литература 1. Ануфриев И.А. Самоучитель MatLab 5.3/6.x. СПб: Изд-во «БХВ-Петербург», 2002. 512 с. 2. Бобровский С.В. Учебный курс Delphi 7. М.: Питер, 2006. 712 с. 3. Черных И.В. Моделирование электротехнических устройств в MATLAB, SymPowerSystem и Simulink. М.: Питер, 2008. 288 с. 4. Черных И.В. Simulink: Инструмент моделирования динамических систем. URL: http://matlab.exponenta.ru/simulink/ book1/index.php (дата обращения: 13.02.2010). 5. Веремей Е.И., Погожев С.В. Nonlinear Control Design Blockset. URL: http://www.tspu.tula.ru/ivt/old_site/lcopy/Matlab_ RU/nonlinecondes/book1/preface.asp.htm (дата обращения: 13.02.2010). 6. Шмелев В.Е. Partial Differential Equations Toolbox. Инструментарий решения дифференциальных уравнений в частных. URL: http://matlab.exponenta.ru/pde/book1/index.php (дата обращения: 13.02.2010). |
 С целью эффективного исследования САР и получения сравнительных характеристик поведения системы при изменении различных ее свойств необходимо не только умение работать с данной программой, но и знание обширного круга команд и функций MATLAB, а также основ программирования в MATLAB и разработки М-файлов. Это может вызвать определенные трудности и значительно замедлить процесс исследований.
С целью эффективного исследования САР и получения сравнительных характеристик поведения системы при изменении различных ее свойств необходимо не только умение работать с данной программой, но и знание обширного круга команд и функций MATLAB, а также основ программирования в MATLAB и разработки М-файлов. Это может вызвать определенные трудности и значительно замедлить процесс исследований.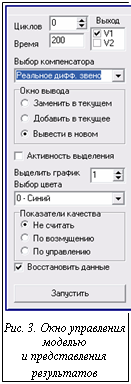 Из рисунков 1 и 2 видно, что настройка модели и необходимые коммутации осуществляются кликом мышки по соответствующему участку схемы и не требуют ввода коэффициентов в соответствующие блоки модели. Для управления моделью и представления результатов используется специальное окно настроек, приведенное на рисунке 3.
Из рисунков 1 и 2 видно, что настройка модели и необходимые коммутации осуществляются кликом мышки по соответствующему участку схемы и не требуют ввода коэффициентов в соответствующие блоки модели. Для управления моделью и представления результатов используется специальное окно настроек, приведенное на рисунке 3.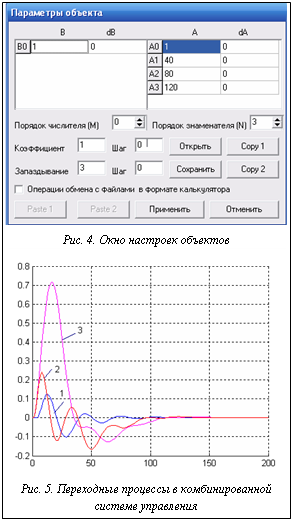 Для удобства работы в программе реализованы такие классические системы, как одноконтурная, каскадная, комбинированная, хотя любую более сложную систему легко привести к более простой путем нехитрых коммутаций. В частности, чтобы из комбинированной системы (рис. 4) перейти к одноконтурной, достаточно разомкнуть ключи H2, H4, H5, H6, H7 и замкнуть ключи H1 и H3, что осуществляется кликом мышки в районе указанного ключа (см. рис. 2).
Для удобства работы в программе реализованы такие классические системы, как одноконтурная, каскадная, комбинированная, хотя любую более сложную систему легко привести к более простой путем нехитрых коммутаций. В частности, чтобы из комбинированной системы (рис. 4) перейти к одноконтурной, достаточно разомкнуть ключи H2, H4, H5, H6, H7 и замкнуть ключи H1 и H3, что осуществляется кликом мышки в районе указанного ключа (см. рис. 2).| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=2576 |
Версия для печати Выпуск в формате PDF (5.84Мб) Скачать обложку в формате PDF (1.43Мб) |
| Статья опубликована в выпуске журнала № 3 за 2010 год. |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Программное определение степени затухания переходных процессов в simulink-моделях
- Программная система исследований динамики технологических процессов формования химических волокон
- Программа моделирования электронной аппаратуры при ударных воздействиях
- Моделирование аттрактора Лоренца
- Модель расчета емкости автоматического склада продукции
Назад, к списку статей