Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Методы уточнения интегрированного наземно-космического мониторинга в системе ГЛОНАСС
Аннотация:Рассматривается проблема повышения точности местоопределения наземного подвижного объекта в системе ГЛОНАСС. Предлагается метод фильтрации данных, основанный на применении многослойных персептронов, для прогнозирования навигационных параметров на текущем шаге по измерениям предыдущих шагов.
Abstract:The question of location accuracy of ground moving object in the GLONASS system. Propose a method of filtering data based on the use of multilayer perceptrons to predict the navigational options at the current step of the measurements in the previous steps.
| Авторы: Болодурина И.П. (prmat@mail.osu.ru) - Оренбургский государственный университет (профессор, зав. кафедрой), Оренбург, Россия, доктор технических наук, Решетников В.Н. (rvn_@mail.ru) - Центр визуализации и спутниковых информационных технологий ФНЦ НИИСИ РАН (профессор), Москва, Россия, доктор физико-математических наук, Таспаева М.Г. (povtas@inbox.ru) - Оренбургский государственный университет | |
| Ключевые слова: комплексная обработка информации, нейросетевой подход, система мониторинга «автограф», точность местоопределения подвижного объекта, система глонасс |
|
| Keywords: complex information processing, neural network approach, monitoring system «Autograph», positioning accuracy of a moving object, GLONASS system |
|
| Количество просмотров: 8252 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
Система ГЛОНАСС представляет второе поколение спутниковых навигационных систем, основным назначением которых является глобальная оперативная навигация приземных подвижных объектов: наземных (сухопутных, морских, воздушных) и низкоорбитальных космических. Термин «глобальная оперативная навигация» означает, что подвижный объект, оснащенный навигационной аппаратурой потребителей, может в любом месте приземного пространства в любой момент времени определить параметры своего движения – три координаты и три составляющие вектора скорости [1].
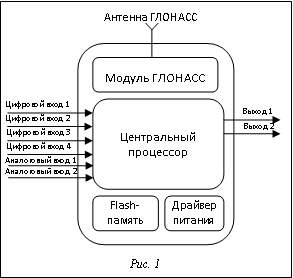
Основная задача НАП – прием информации со спутников, ее интерпретация и вывод на дисплей либо в канал связи в надлежащем виде. Так, для этих целей специалистами ООО «ТехноКом» (г. Челябинск) разработана система «АвтоГРАФ» спутникового мониторинга, которая позволяет проконтролировать в режиме реального времени местонахождение транспортного средства (ТС), направление его движения, пробег и объем затрачиваемого горючего. Для этого на борту каждого ТС достаточно установить прибор, принимающий сигналы навигационных спутников, а на диспетчерском пункте – соответствующую программу. Устройство, размещенное на борту ТС, накапливает информацию о своем местоположении с заданным периодом либо, анализируя характер движения ТС, записывает маршрут движения, что значительно экономит объем передаваемых данных: время хранения маршрута в приборе может доходить до нескольких лет. На рисунке 1 изображена функциональная схема контроллера системы «АвтоГРАФ». Модуль ГЛОНАСС с помощью внешней активной антенны принимает кодовые сигналы со спутников системы ГЛОНАСС и, используя внутренний вычислитель, определяет географические координаты местоположения приемника, а также точное время, скорость и направление движения. Полученные данные по протоколу NMEA поступают с выхода модуля в блок центрального процессора. Центральный процессор – это ядро контроллера «АвтоГРАФ», связывающее все компоненты системы воедино и обеспечивающее их взаимодействие по заложенной в него программе. В качестве процессора выступает быстродействующая однокристалльная микроЭВМ, обеспечивающая скорость и точность вычислений, достаточную для решения различных навигационных и сервисных задач. Существующая НАП определяет координаты объекта с погрешностью 0,1–30 м и его скорость – 0,02–0,2 м/с в зависимости от режима работы аппаратуры. Показания могут колебаться под влиянием внешних факторов: - прохождение ионосферного и тропосферного слоев, влияющих на скорость прохождения сигнала; - наличие электромагнитных помех; - инфраструктура местности (отражение, затенение сигнала космических навигационных систем, туннели), создающая многолучевость принимаемых сигналов. Задачей комплексной обработки навигационной информации является совместная обработка данных навигационного счисления для определения основных навигационных параметров движущегося объекта с максимально возможной точностью, которая зависит от качества навигационных измерителей (датчиков навигационной информации) и алгоритмов обработки навигационных сигналов.
В настоящей статье предлагается новый подход при комплексировании на уровне вторичной обработки информации спутниковой радионавигационной системы ГЛОНАСС. Широкое распространение получило разделение обработки аппаратных измерений в навигационных системах на первичную и вторичную. Под первичной обработкой информации подразумевается наблюдение, которое заключается в оценке вектора состояния регулируемой системы. Разного рода возмущения и помехи на входе системы в этой задаче не учитываются. Под вторичной – выполняемая в ЭВМ обработка выходных данных самих измерителей, результаты которой используются для определения и уточнения координат и скорости движения, углов ориентации подвижного объекта и источников погрешностей измерителей [2]. Сигналы, передаваемые каждым космическим аппаратом (КА) системы ГЛОНАСС в составе оперативной информации, описывают положение фазового центра передающей антенны данного КА в связанной с Землей геоцентрической системе координат ПЗ-90.02, определяемой следующим образом: - начало координат расположено в центре масс Земли; - ось Z направлена на условный полюс Земли, как определено в рекомендации Международной службы вращения Земли (IERS); - ось X направлена в точку пересечения плоскости экватора и начального (нулевого) меридиана, установленного Международным бюро времени (BIH); - ось Y дополняет геоцентрическую прямоугольную систему координат до правой. В этой системе координат положение точки в пространстве определяется значениями координат X, Y, Z. Система «АвтоГРАФ» выдает значения координат и проекций скорости ТС в дискретные моменты времени через заданный интервал, рассчитывая их по псевдодальностям до КА. Псевдодальности рассчитываются по временным задержкам Tt сигнала по трассе i-й КА–потребитель и известной скорости распространения радиоволн [3]. На рисунке 2 изображен график движения ТС на стоянке. Кривая отображает зависимость от времени t (секунды) средней для координат x, y среднеквадратической ошибки определения координат S (в метрах). Здесь наблюдается пробег из-за дрейфа координат, возникающего при переотражении сигналов. Запишем формальную дискретную модель движения: x(k+1)=A(k)x(k)+V(k), k³k0, (1) y(k)=C(k)x(k)+w(k). (2) Недоступный непосредственному наблюдению фазовый вектор x(k) имеет размерность n, измеряемый вектор y(k) – размерность m. Параметры системы A(k) и C(k) представляют собой известные матрицы соответствующей размерности, а вектор возмущений V(k) размерности n и ошибка измерений w(k) размерности m – векторные случайные процессы с дискретным временем. В РЛС автоматического сопровождения и обработки сигналов в инерциальных навигационных системах наиболее распространенным алгоритмом вторичной обработки является фильтр Калмана. В алгоритме типа многомерной калмановской фильтрации начальными условиями на каждом новом цикле служат оценка состояния системы и величина, характеризующая ее погрешность. Данный алгоритм последовательно обрабатывает за- ново поступающие векторы измерений, учитывая при этом значения, вычисленные на предшествующем цикле. Эта черта отличает способ фильтра Калмана от нерекуррентных алгоритмов, которым ради работы требуется оберегать целый массив обрабатываемых данных. На следующем шаге с помощью обрабатываемых на данном цикле измерений уточняются начальные условия. По мере последовательной обработки новых измерений происходит накопление фильтром полезной информации. Если элементы вектора состояния твердо выражаются сквозь измеренные величины, суммарная погрешность оценок, как правило, должна снижаться [4]. Реализация алгоритма обработки измерений может основываться на использовании в рамках информационно-управляющей системы, работающей в режиме реального времени. В силу того, что в данной системе требуется в реальном масштабе времени отслеживать значительное число быстроменяющихся параметров, вырабатывать эффективные и своевременные решения по управлению, необходим математический аппарат, позволяющий обрабатывать большой поток сложноструктурированной информации о текущем состоянии производственной системы. Базой такого математического аппарата являются алгоритмы глобального распараллеливания вычислительных процессов, в частности, модели нейронных сетей. В реальных системах часто невозможно определить значения некоторого набора параметров или определить их с высокой долей погрешности, возможен также выход из строя тех или иных датчиков. Кроме того, отсутствие точной математической модели является предпосылкой для применения в системе аппарата нечетких множеств. Основным принципом нейросетевого моделирования является принцип черного ящика. В этом случае моделируется внешнее функционирование системы, а не ее внутренняя структура, как при аналитическом подходе. Функционирование системы в рамках нейросетевого моделирования описывается информационно на основе наблюдений или данных экспериментов над реальной системой. Интерпретация получаемых с помощью таких моделей результатов более сложна, чем при использовании формальных математических моделей, однако несомненное достоинство – отсутствие ограничений на сложность моделируемых систем – определяет их важную практическую значимость. В данной работе предложен подход к определению местоположения подвижного объекта в системе ГЛОНАСС, использующий нейронные сети. В процессе функционирования многослойная нейронная сеть формирует выходной сигнал Xl в соответствии с входными сигналами X0 по формуле
где l – число слоев в сети; Xi – выход нейронов i-го слоя; X0 – вход сети; Wi – матрица весовых коэффициентов между нейронами (i-1) и i слоев; fi – активационная функция нейронов i-го слоя, Выходной сигнал – это результат обработки входного сигнала при его прохождении по связям сети. Следовательно, нейронная сеть реализует функциональное соответствие между входом и выходом и может служить информационной моделью F* (1) системы F (2).
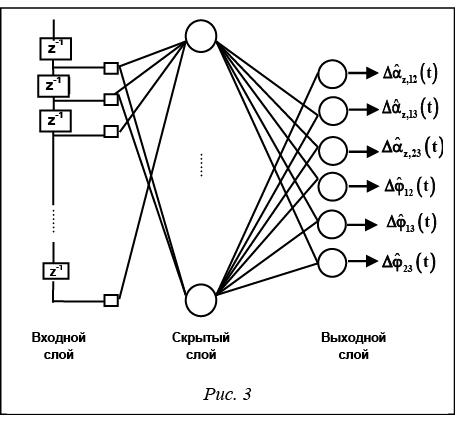
Измерения подаются на входной слой сети и хранятся в элементах кратковременной памяти На вход каждой сети подается вектор измерений предыдущего шага y(t–1)={Daz,12(t–1), Daz,13(t–1), Daz,23(t–1), Dj12(t–1), Dj13(t–1), Dj23(t–1)}, на выходе получается оценка измерений текущего шага Для ограничения пространства поиска при обучении ставится задача минимизации целевой функции ошибки нейронной сети, которая находится по методу наименьших квадратов:
где yj – значение j-го выхода нейросети; dj – целевое значение j-го выхода; p – число нейронов в выходном слое. Обучение нейросети осуществляется методом градиентного спуска, то есть на каждой итерации изменение веса производится по формуле
где h – параметр, определяющий скорость обучения. Введем вспомогательную переменную:
Теперь можно определить рекурсивную формулу для определения
Нахождение
Запишем формулу (5) в раскрытом виде:
Рассмотрим полный алгоритм обучения нейронной сети. 1. Подать на вход нейросети один из требуемых образов и определить значения выходов нейронов нейронной сети. 2. Рассчитать 3. Рассчитать по формулам (7) и (9) 4. Скорректировать все веса нейронной сети:
5. Если ошибка существенна, повторить алгоритм с шага 1. На этапе 2 сети поочередно в случайном порядке предъявляются векторы из обучающей последовательности. Для повышения точности местоопределения наземного подвижного объекта предложен метод контроля и диагностики информационных нарушений в навигационных системах, использующий нейросетевые технологии. Перед традиционными вычислительными системами нейронные сети имеют ряд преимуществ [5]. · Используя способность обучения на множестве примеров, нейронная сеть может решать задачи, в которых неизвестны закономерности развития ситуации и зависимости между входными и выходными данными. · Имея возможность работы при наличии большого числа неинформативных, шумовых входных сигналов, нет необходимости делать их предварительный отсев – нейронная сеть сама определит малопригодность для решения задачи и отбросит их. · Нейронные сети потенциально отказоустойчивы, то есть при неблагоприятных условиях их производительность падает незначительно. Например, если поврежден какой-то нейрон или его связи, извлечение находящейся в памяти информации затрудняется. Однако, принимая во внимание распределенный характер хранения информации в нейронной сети, можно утверждать, что только серьезные повреждения структуры нейронной сети существенно повлияют на ее работоспособность. Поэтому снижение качества работы нейронной сети происходит медленно. · Нейронные сети обладают потенциальным сверхвысоким быстродействием за счет использования массового параллелизма обработки информации в системах, которые сейчас активно развиваются. В заключение необходимо отметить, что одной из важнейших задач глобальной навигации в системе ГЛОНАСС является точное определение пространственных координат наземных подвижных объектов. Эта задача должна решаться комплексно. При первичной обработке оценивается вектор состояния наблюдаемой системы. Вторичная обработка информации предполагает уточнение координат и скорости движения объекта. Следует ожидать, что предложенный метод фильтрации данных в навигационных системах, основанный на применении многослойных персептронов для прогнозирования навигационных параметров на текущем шаге, по измерениям на предыдущих шагах может повысить эффективность управления наземным подвижным объектом, использующим систему ГЛОНАСС. Литература 1. Решетников В.Н. Космические телекоммуникации (Начала). Тверь: Изд-во ЗАО НИИ ЦПС, 2009. 128 с. 2. Сучилин В.И., Волобуев Г.Б. Оценка возможностей повышения точности местоопределения наземного подвижного объекта путем вторичной обработки показаний аппаратуры пользователя систем GPS NAVSTAR и/или ГЛОНАСС // Кибернетика и высокие технологии XXI века: сб. докл. VIII Междунар. науч.-технич. конф. Воронеж, 2007. Т. 2. С. 1066–1073. 3. Глобальная навигационная спутниковая система ГЛОНАСС: Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением. [Интерфейсный контрольный документ]. М., 2008. 4. Браммер К., Зиффлинг Г. Фильтр Калмана–Бьюси. Детерминированное наблюдение и стохастическая фильтрация; [пер. с нем.]. М.: Наука. Глав. ред. Физматлит, 1982. 200 с. 5. Деева А.С. Математическое и алгоритмическое обеспечение диагностики информационных нарушений инерциальных навигационных систем на основе нейросетевого подхода: дис. … канд. техн. наук. Челябинск: Изд-во ЮУрГУ, 2010. |
 В последние годы спутниковые навигационные системы стали неотъемлемой частью транспортной инфраструктуры Российской Федерации. Наибольшее распространение они получили в секторе частного транспорта. Пользовательский сегмент включает в себя оборудование, позволяющее определять местоположение, скорость движения, расстояние до объекта следования и время, за которое можно достигнуть цели при определенной скорости. Наряду с GPS-навигаторами все большее распространение получает навигационная аппаратура потребителей (НАП) ГЛОНАСС и ГЛОНАСС/GPS (мультисистемный приемник).
В последние годы спутниковые навигационные системы стали неотъемлемой частью транспортной инфраструктуры Российской Федерации. Наибольшее распространение они получили в секторе частного транспорта. Пользовательский сегмент включает в себя оборудование, позволяющее определять местоположение, скорость движения, расстояние до объекта следования и время, за которое можно достигнуть цели при определенной скорости. Наряду с GPS-навигаторами все большее распространение получает навигационная аппаратура потребителей (НАП) ГЛОНАСС и ГЛОНАСС/GPS (мультисистемный приемник).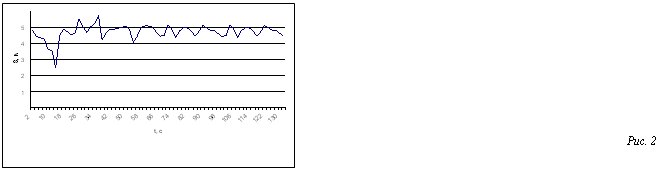
 (3)
(3) .
.
 . Сети для разных состояний системы имеют одинаковую структуру.
. Сети для разных состояний системы имеют одинаковую структуру.
 для каждого состояния системы Si, i=0, 1, 2, 3. При обучении использованы алгоритм обратного распространения ошибки и функция тренировки.
для каждого состояния системы Si, i=0, 1, 2, 3. При обучении использованы алгоритм обратного распространения ошибки и функция тренировки. , (4)
, (4) , (5)
, (5) . (6)
. (6) n-го слоя, если известно
n-го слоя, если известно  следующего n+1-го слоя:
следующего n+1-го слоя: . (7)
. (7) . (8)
. (8) . (9)
. (9) для выходного слоя нейронной сети по формуле (8), а изменения весов
для выходного слоя нейронной сети по формуле (8), а изменения весов  выходного слоя N – по формуле (9).
выходного слоя N – по формуле (9). и
и  соответственно для остальных слоев нейронной сети, n=N-1, ..., 1.
соответственно для остальных слоев нейронной сети, n=N-1, ..., 1. . (10)
. (10)| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=2932 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
| Статья опубликована в выпуске журнала № 4 за 2011 год. [ на стр. 130 – 134 ] |
Назад, к списку статей