Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Интеллектуальные системы и алгоритмы управления объектами обстановки в тренажерах
Аннотация:В статье описаны построение и введение в структуру тренажера модуля нейронной сети, позволяющего управ-лять объектами обстановки на основе адекватного принятия решения обученной в процессе функционирования сис-темы сети. Приведена начальная формализация задачи на примере тактического тренажера и обозначены основные проблемы в данной области.
Abstract:In article the idea of construction and introduction in simulator structure of neural network module is resulted, allowing to operate objects on the basis of adequate decision-making system a network trained during functioning, initial formalization of a problem on an example of a tactical simulator also is resulted and the basic problems in this area are designated.
| Авторы: Янюшкин В.В. (vadim21185@rambler.ru) - Донской филиал Центра тренажеростроения, г. Новочеркасск, г. Новочеркасск, Россия, кандидат технических наук, Захаров В.Л. (zvl@fromru.com) - 24ЦНИИ Министерства обороны РФ, г. Петродворец, кандидат технических наук | |
| Ключевые слова: интеллектуальный алгоритм, управление, тренажер, нейронная сеть, объект обстановки |
|
| Keywords: intellectual algorithm, control management, simulator, neural network, object |
|
| Количество просмотров: 12764 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
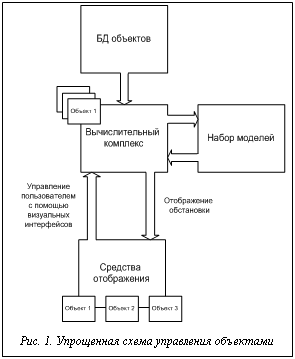
Разработка систем управления различными объектами сводится к построению программных комплексов, имитирующих их работу. Например, во многих тренажерах присутствуют объекты окружающей обстановки, управление которыми может сводиться к заданию направления и скорости движения, команд включения и выключения различных устройств и т.д. При этом существуют возможности манипулирования этими объектами человеком при помощи специализированных программных интерфейсов и задания вручную па- раметров, а также использования моделей, опи- сывающих алгоритм поведения. Как правило, данные модели пользуются алгоритмами с жестко заданными свойствами поведения объектов, основанными на временных или иных факторах. Структуру такой системы в общем случае можно представить в виде набора средств отображения (экранных форм), комплекса моделей для каждого типа объектов, вычислительного звена, управляющего временной и событийной синхронизацией (рис. 1). К недостаткам такого подхода можно отнести необходимость присутствия в ряде случаев реального человека для решения задач контроля над объектами, а также выдачи команд по их управлению (в тех случаях, когда эти действия не зависят напрямую и не управляются моделями поведения). Существующие в настоящее время методы теории принятия решений позволяют имитировать действия и команды человека для управления и моделирования действий объектов. К таким методам можно отнести искусственные нейронные сети, генетические алгоритмы и ряд других [1].
В данной схеме принятие решений по управлению объектом № 3 полностью полагается на выход модели нейронной сети, которая имитирует работу реального объекта в той или иной ситуации. При этом ставятся задачи подбора конфигурации сети, алгоритма ее обучения и настройки, ранжирования входных данных, задания настроек и классификации объекта. В процессе выбора методик применения нейронных сетей в данной задаче возможно рассмотрение различных разработок, в частности, сетей Хопфилда, Хэмминга, однослойных и многослойных персептронов с прямым и двунаправленным распростране- нием [2–3]. Наиболее общий подход предусматривает несколько следующих этапов. I этап – постановка задачи; определяются цели и информационное пространство исследования, вырабатывается алгоритм его проведения. II этап – сбор данных для обучения; осуществляется набор репрезентативного материала – примеров для обучения сети, каждый из которых представляет массив входных данных и в случае использования обучения с учителем соответствующий ему известный ответ. III этап – создание и обучение нейронной сети с использованием программы-эмулятора; данный этап включает отбор наиболее информативной подсистемы признаков, определение архитектуры искусственной нейронной сети, обучение окончательной нейросетевой модели оптимизированной архитектуры, оценку направления и степени влияния признаков, составляющих входной вектор на моделируемый параметр. IV этап – создание интерфейса; разрабатываются средства взаимодействия с пользователем для облегчения настройки, интерпретации результата и вывода ответа сети. V этап – процесс доучивания в условиях реальной работы и накопления данных, которые используются для дальнейшей работы уже имеющейся нейронной сети с целью ее приложения к анализу и моделированию конкретных объектов.
По способу управления тактические объекты условно делятся на активные – управляемые обучаемыми, и пассивные – все остальные тактические объекты, управляемые руководителем обучения или автоматически по заранее заданной программе (детерминированное управление), а также в соответствии со складывающейся обстановкой (адаптивное, или игровое управление). В процессе учебного мероприятия способ управления объектом может изменяться. Идентичность описания детерминированного и адаптивного управления упрощает смену способов управления объектом. Любые алгоритмы управления объектами можно представить в виде последовательности логических операторов вида if (ИС)ВУ, где ИС – инициирующее событие, ВУ – вектор управления. Под вектором управления будем понимать совокупность управляющих воздействий на объект. Применительно к управлению маневрированием объектов ВУ={Knew, b, Vnew, Hnew, y}, где Knew – новый (заданный) курс объекта; b – угол перекладки вертикального руля на циркуляции; Vnew – новая (заданная) скорость объекта; Hnew – новая (заданная) глубина объекта; y – заданный дифферент при изменении глубины. Применительно к управлению применением оружия, вооружения и технических средств объекта ВУ будет иметь более сложный вид, определяемый перечнем и управляемыми параметрами оружия (вооружения) конкретного объекта. Под ИС будем понимать событие, заключающееся в выполнении какого-либо условия и инициирующее новые управляющие воздействия на объект. При детерминированном управлении ИС заключается в наступлении момента t, соответствующего времени T0 начала нового галса объекта: ИС=(t³T0). При адаптивном управлении ИС заключается в получении объектом новой информации об обстановке. Назовем доступную объекту информацию вектором наблюдаемой обстановки (VHO). Тогда ИС заключается в совпадении текущего значения Элементы VHO связаны между собой конъюнктивно, то есть ИС считается наступившим при совпадении всех элементов векторов Поскольку в данной модели принято, что ИС жестко связано с ВУ, в дальнейших рассуждениях используем термин инициированное управляющее воздействие (ИУ), под которым будем понимать совокупность ИС и соответствующего ему ВУ. Для данной модели управляемый объект всегда находится в состоянии ожидания одного или нескольких ИУ. При этом состояние (совокупность значений параметров) объекта может быть установившимся или переходным (до завершения переходных процессов, вызванных управляющим воздействием). Новое ИУ может наступить и до окончания переходного состояния, вызванного предыдущим ИУ. Одновременно может ожидаться наступление нескольких ИУ. Совокупность ИУ, одновременно ожидаемых объектом, будем называть группой ИУ. В общем случае совокупность группы ИУ определяется стратегией поведения (миссией) объекта в конкретном эпизоде учебного мероприятия. ИУ, которые выполняются последовательно одно за другим, назовем последовательностями ИУ. В ряде ситуаций требуется выполнение заранее определенной последовательности ИУ. Соответствующие устойчивые (жесткие) последовательности ИУ будем называть директивными последовательностями. Сформированные последовательности ИУ, которые могут повторяться для разных объектов и на различных этапах моделирования, назовем типовыми. Набор структур указанных типов ИУ и последовательностей ИУ для управления объектами обстановки определит входные и выходные параметры интеллектуального модуля взаимодействия вычислительного комплекса и набора моделей отображения объектов тактической обстановки. Методика разработки и использования. Математической основой построения модуля может являться, например, многослойный персептрон. Входные данные (состояние моделируемого объекта и окружающей обстановки) поступают на слой нейросети, который передает преобразованные сигналы на ряд других (скрытых) слоев. Скрытый слой состоит из некоторого числа нейронов. Работа персептрона сводится к класси- фикации входных сигналов, принадлежащих n-мерному гиперпространству, по некоторому числу классов. С математической точки зрения это происходит путем разбиения гиперпространства гиперплоскостями. Каждая полученная область является областью определения отдельного признака действия и принятия решения по управлению объектом. Упрощенно можно выделить несколько режимов работы такого модуля в составе системы: - режим обучения – модуль находится в процессе сбора данных о состоянии всех объектов во время функционирования системы и управления реальными операторами; - режим пассивного наблюдения – модуль находится в состоянии наблюдения за текущей ситуацией, выдает прогнозные и потенциально возможные команды управления на уровне подсказок для операторов системы; - режим активного наблюдения – модуль находится в режиме пассивного наблюдения, а также параллельно накапливает информацию для дальнейшего обучения и совершенствования; - режим управления объектами – модуль находится в режиме принятия входных данных и выдачи управляющих команд для соответствующих объектов тренировки. Практическая ценность использования интеллектуальных схем управления. Результаты внедрения подобного подхода в существующие или перспективные разрабатываемые тренажеры позволят получить: - реалистичное управление объектами на основе генерации и выбора лучшего решения исходя из опыта всех прошлых данных проведенных занятий, а не в зависимости от алгоритма, заложенного в той или иной модели поведения; - возможность ранжирования степени и качества принятия решений управления объектом, в том числе уровень его интеллекта, и как следствие – сложность разыгрываемой ситуации; - сокращение количества рабочих мест в системе и возможность их оперативной замены интеллектуальным нейронным модулем, в том числе возможность передачи управления конкретным объектом или их группой. Предложенный подход может применяться не только в контексте указанного в качестве примера тренажера по управлению динамичными объектами, но и в других разработках с целью интеллектуализации программных решений и введения качественно новой модели управления объектами. Литература 1. Рутковская Д., Пилиньский М., Рутковский Л. Нейронные сети, генетические алгоритмы и нечеткие системы. М.: Горячая линия–Телеком, 2006. 452 с. 2. Хайкин С. Нейронные сети: полный курс. М.: Издат. дом «Вильямс», 2006. 1104 с. 3. Вороновский Г.К. [и др.]. Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности. Харьков: ОСНОВА, 1997. 112 с. |
 Искусственные нейронные сети – это математические модели, а также их программные или аппаратные реализации, построенные по принципу организации и функционирования биологических нейронных сетей, то есть сетей нервных клеток живого организма. Одно из главных преимуществ нейронных сетей перед традиционными алгоритмами – возможность их обучения [2]. Таким образом, задача разработки механизмов контроля и управления объектами в описанной выше системе сводится к введению модулей на основе нейронной сети и созданию такой конфигурации при подключении входа сети к моделям объектов обстановки, которая позволила бы имитировать их действия в дальнейшем. На рисунке 2 представлена схема управления с введением модуля нейронной сети, где в качестве примера управление объектом № 3 передано обученной сети.
Искусственные нейронные сети – это математические модели, а также их программные или аппаратные реализации, построенные по принципу организации и функционирования биологических нейронных сетей, то есть сетей нервных клеток живого организма. Одно из главных преимуществ нейронных сетей перед традиционными алгоритмами – возможность их обучения [2]. Таким образом, задача разработки механизмов контроля и управления объектами в описанной выше системе сводится к введению модулей на основе нейронной сети и созданию такой конфигурации при подключении входа сети к моделям объектов обстановки, которая позволила бы имитировать их действия в дальнейшем. На рисунке 2 представлена схема управления с введением модуля нейронной сети, где в качестве примера управление объектом № 3 передано обученной сети.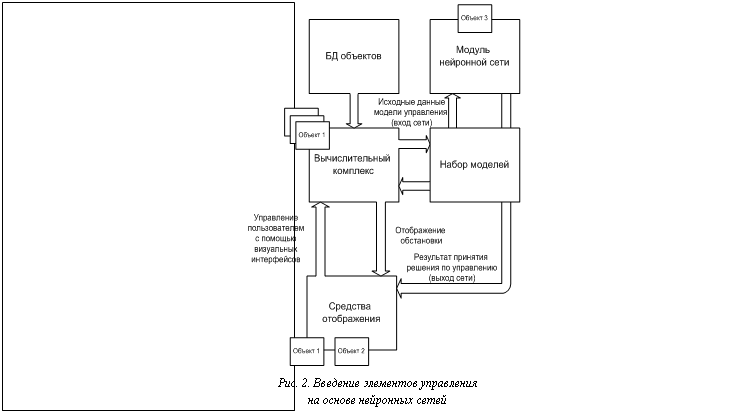
 с некоторым заданным его значением
с некоторым заданным его значением  :
:  .
.| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=2936 |
Версия для печати Выпуск в формате PDF (5.83Мб) Скачать обложку в формате PDF (1.28Мб) |
| Статья опубликована в выпуске журнала № 4 за 2011 год. [ на стр. 148 – 150 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Управление интеллектуальными ресурсами проектов в сфере нанотехнологий
- Унифицированное описание функционирования информационных радиоэлектронных систем для оценки программного обеспечения учебно-тренировочных средств
- Нейросетевая инструментальная среда для создания персонализированных интерфейсов прикладных программ
- Информационно-коммуникационная технология комплексного управления деятельностью студентов
- Интеллектуальная информационная система для решения задач прогнозирования неисправностей вагонного оборудования на железнодорожном транспорте
Назад, к списку статей