Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Исследование функции неопределенности широкополосных когерентных многочастотных зондирующих сигналов для получения дальностных портретов в обзорных РЛС
Аннотация:Работа посвящена разработке алгоритма вычисления и исследования функции неопределенности широкополосных когерентных многочастотных зондирующих сигналов, используемых для получения дальностных портретов в обзорных радиолокационных станциях (РЛС). Для оценки разрешающей способности РЛС по радиальной дальности получено универсальное аналитическое выражение для функции неопределенности широкополосных когерентных многочастотных зондирующих сигналов двух видов – разомкнутых и сомкнутых. С этой целью используется общее симметричное выражение комплексных функций рассогласования для когерентных сигналов с единичной энергией. Для исследования функции неопределенности пачки прямоугольных импульсов с разными частотами с нормировкой на максимальное значение тела неопределенности были разработаны алгоритм и программа расчета функции неопределенности многочастотных зондирующих сигналов на языке инженерных и математических вычислений MATLAB 6.5. Представлены результаты исследования функции неопределенности при различных параметрах мно-гочастотных зондирующих сигналов. Для частных случаев полученное выражение совпадает с известными. Алгоритм позволяет получать вид функции неопределенности и ее сечений при различных параметрах многочастотных зондирующих сигналов (длительность импульса, период повторения импульсов в пачке, скважности, число импульсов в малой пачке (одной частоты), число малых пачек (число частот), изменение частоты от подпачки к подпачке (от малой пачки к малой пачке), ширина спектра импульса). Алгоритм вычисления и исследования функции неопределенности отличается от известных новыми соотношениями, учитывающими вариации параметров многочастотных зондирующих сигналов в пределах их длительности, и новыми процедурами численного определения функции неопределенности, обеспечивающими сокращение вычис-лительных затрат. Полученные выражения могут быть использованы при моделировании и оценке функции неопределенности при различных параметрах многочастотных зондирующих сигналов, используемых для получения дальностных портре-тов в интересах распознавания классов и типов воздушных объектов лицом, принимающим решение при выборе системы распознавания РЛС и сравнении альтернативных вариантов.
Abstract:The work is devoted to development of an algorithm for computing and studying an ambiguity function of broadband coherent multifrequency probe signals used for portraits of range surveillance radars. To estimate the radar resolution along the radial distance, the authors has obtained a universal analytical expression for an ambiguity function of broadband coherent multifrequency sounding signals. There are two types of these signals: "open" and "serried". For this purpose the authors use a general symmetrical expression of complex mismatch functions for coherent sig-nals with united energy. The authors developed an algorithm and software for calculating an ambiguity function of multifrequency sounding sig-nals using MATLAB 6.5 (the language of engineering and mathematical calculations) to investigate the ambiguity function of a rectangular pulses set with different frequencies normalized to the maximum value of the uncertainty body. The article gives the results of the ambiguity function investigation with different parameters of multifrequency sound ing signals. For special cases this expression coincides with the known. The algorithm allows getting a the ambiguity function and its section s with different parameters of multifrequency sounding signals (pulse width, pulse repetition period in a pack, the duty cycle, the number of pulses in a small pack (one frequency), the number of small packets (number of frequencies), the change in frequency from one subpack to another subpack (from one small pack to another small pack), the pulse spectrum width ). The computing and research algorithm for the ambiguity function differs from the known because of new relations that take into account parameters variations of multifrequency sounding signals within their duration, and new numerical dete r-mination procedures for the ambiguity function that reduce computing costs. Obtained expressions can be used for modeling and evaluating the ambiguity function at different parameters of multifrequency probe signals. That signals are used for making range portraits recognition of classes and types of air objects by a decision maker when selecting radar recognition system and comparing alternatives.
| Авторы: Бердышев В.П. () - Военная академия воздушно-космической обороны им. Маршала Советского Союза Г.К. Жукова (профессор), г. Тверь, Россия, доктор технических наук, Талалаев А.Б. () - Компания «Радиотехнические и информационные системы воздушно-космической обороны» (профессор, генеральный директор), Тверь, Платонов А.Ю. (romkord@yandex.ru) - Главное управление научно-исследовательской деятельности и технологического сопровождения передовых технологий (инновационных исследований) МО РФ, Москва (начальник гру), Москва, Россия, Миронов А.М. (ncuog@mail.ru) - МО РФ (референт зам. министра обороны РФ ), Москва, Россия | |
| Ключевые слова: зондирующий сигнал, функция неопределенности, распознавание, алгоритм |
|
| Keywords: a probe signal, ambiguity function, identification, algorithm |
|
| Количество просмотров: 21474 |
Версия для печати Выпуск в формате PDF (5.36Мб) Скачать обложку в формате PDF (1.03Мб) |
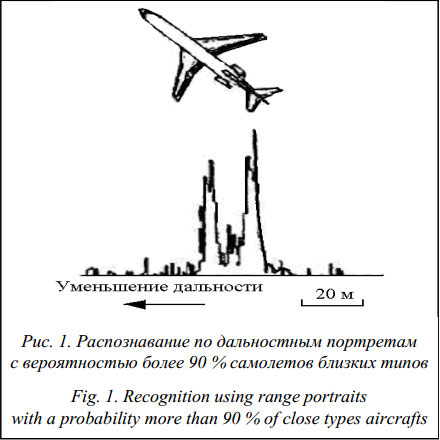
Анализ видов зондирующих сигналов, используемых в радиолокационных станциях (РЛС) для повышения разрешающей способности по дальности, показывает, что особое внимание уделяется разомкнутым частотно-модулированным сигналам (ЧМС) со ступенчатым законом изменения частоты (stepped frequency signals). Такие сигналы сравнительно просто вводятся в РЛС с перестройкой частоты от посылки (импульса, пачки импульсов) к посылке. Это позволяет резко повысить разрешающую способность по дальности и получать дальностные и двумерные радиолокационные портреты воздушных объектов (ВО) без существенного изменения структуры РЛС. Одновременно повышаются потенциал и помехозащищенность РЛС от пассивных помех за счет перехода к когерентному накоплению. В работах [1–3] показано, что для построения радиолокационных дальностных портретов (ДП) наиболее подходящим (с точки зрения реализуемости) способом обеспечения высокой разрешающей способности по дальности является использование многочастотных зондирующих сигналов (МЧЗС). Пример использования рассматриваемого сигнала описан А. Цивеком и Р. Богнером (Австралия) в 1996 г. Сигнал рассчитан на разрешающую способность по дальности 0,6 м, имеет ширину спектра частот 256 МГц и сводится к когерентной последовательности 128 простых радиоимпульсов с полосой частот 2 МГц. Длительность этих импульсов составляет 0,5 мкс, а несущая частота изменяется от импульса к импульсу на 2 МГц. Самолеты близких типов – «Боинг 727» и «Боинг 737» – различались по дальностным портретам (рис. 1) с вероятностью более 90 % (в таблице 1 представлена матрица результатов распознавания, а в таблице 2 – требования к линейной разрешающей способности), однако в условиях изменения ракурса только на 50°.
Таблица 1 Матрица результатов распознавания Table 1 A matrix with recognition results
Таблица 2 Требования к линейной разрешающей способности Table 2 Requirements for a linear resolving power
Известно, что в радиолокации на вопросы, связанные с разрешающей способностью, различными видами неопределенностей, точностью из- мерений и подавлением мешающих отражений, когда заданы форма излучаемого сигнала и характеристики фильтра приемника, отвечает функция рассогласования (неопределенности), которая описывает комплексную огибающую сигнала на выходе радиолокационного приемника как функцию дальности и радиальной скорости (частоты) радиолокационной цели [4]. Важность этой функции определяется и ее различной интерпретацией: во-первых, комплексная модулирующая функция, которая при фиксированной частоте F описывает амплитудную модуляцию сигнала (на выходе приемного фильтра), отраженного от цели с доплеровским сдвигом относительно средней частоты фильтра; во-вторых, корреляционная функция модулирующей функции передаваемого сигнала, сдвинутой на вели- чину доплеровского частотного сдвига F, и мо- дулирующей функции передаваемого сигнала с нулевым временным сдвигом (τ = 0). При F = 0 функция неопределенности (ФН) сводится к автокорреляционной функции модулирующей функции передаваемого сигнала. Эта функция применяется при построении дальностных портретов ВО. В связи с этим представляет интерес получение компактных выражений для функций рассогласования и самих тел рассогласования (неопределенности) МЧЗС, особенно при большом значении произведения длительности сигнала на полосу частот (базы сигнала). Для сомкнутых ЧМС нет компактных выражений для данных функций. Цель статьи – описать разработанный алгоритм вычисления и исследования функции неопределенности широкополосных когерентных МЧЗС, используемых для получения дальностных портретов в обзорных РЛС. Аналитические выражения для функции неопределенности МЧЗС
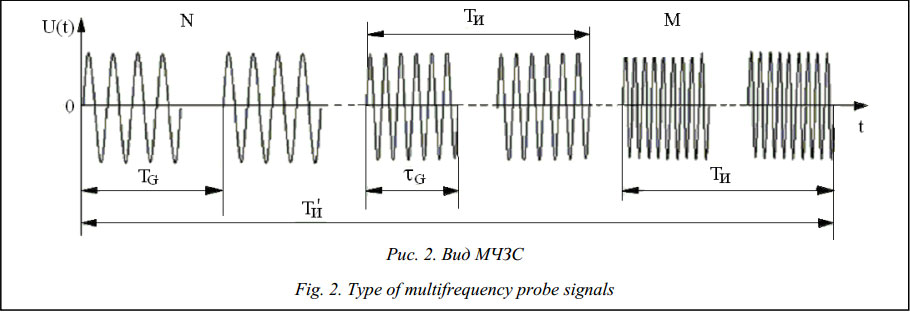
Многочастотное зондирование предполагает формирование последовательности когерентных импульсных сигналов с частотами заполнения, изменяющимися от пачки к пачке по линейно-ступенчатому закону (рис. 2). Объект локации при этом должен облучаться многочастотными пачками радиоимпульсов. Каждая пачка в интересах упрощения последующей обработки должна состоять из G одночастотных импульсов длительностью tG и периодом повторения TG. Одночастотные пачки излучаются с периодом повторения TИ. При линейном законе изменения частоты от пачки к пачке используемые частоты заполнения одночастотных пачек отличаются на величину Df. Математическая модель данного сигнала описывается следующим выражением:
где 2N – число одночастотных пачек радиоимпульсов, равное количеству фиксированных частот перестройки; jg – начальная фаза g-го радиоимпульса; f0 – основная несущая частота сигналов; U0(t) – закон модуляции радиоимпульса. При малой скважности (сомкнутости) импульсного сигнала он может рассматриваться как один протяженный импульс со сложным внутриимпульсным законом модуляции по частоте с девиацией Δf·2N. Поэтому такие сигналы называют сигналами с «синтезом» спектра. Таким образом, МЧЗС представляет собой ограниченную последовательность пачек когерентных радиоимпульсов с различными частотами, повторяющуюся во времени определенное число раз (рис. 2). При этом высокое разрешение по радиальной координате достигается за счет использования МЧЗС, и оно предполагает получение импульсной характеристики (ИХ) цели. Для получения компактных выражений функций рассогласования для разомкнутых и сомкнутых ЧМС со ступенчатым законом изменения частоты при различных значениях произведения длительности сигнала на полосу частот (базы сигнала) используем общее симметричное выражение комплексных функций рассогласования для когерентных сигналов с единичной энергией вида
где t, F – рассогласования по времени и частоте принимаемого сигнала. В предположениях прямоугольной огибающей и единичных энергий совокупного сигнала и его элементов (посылок)
где M – число малых пачек (число частот) (см. рис. 2); N – число импульсов в малой пачке (одной частоты); Т – период повторения импульсов в пачке; U1(t – kT – lNT) – огибающая принимаемой посылки. Подставив (3) в (2), имеем
Введем новые переменные, удобные для анализа: t¢ = t – k1T – l1NT Þ t = t¢ + k1T + l1NT, тогда интеграл в (4) будет равен
где tИ – длительность импульса; fl = dF – частотная добавка к частоте несущей; rect[x] = 1, если |x|£0,5, и rect[x] = 0, если |x|>0,5. В этом случае формула (4) примет вид
Полученное выражение можно привести к двукратной (вместо четырехкратной) сумме, если частоты заполнения радиоимпульсов выбрать с регулярной дискретностью. По-прежнему полагаем, что fl – частотная добавка к частоте несущей. Пусть fl = Dfl, t¢(k1, k2, l1, l2) = t + (k1 – k2)T + (l1 – l2)NT, (7)
К сожалению, из (7) не видна свертка по частотам, так как в явном виде и независимо фигурирует частота fl2 = Df l2, которая не сводится к разности частот fl1 - fl2. Между тем везде индексы по времени k1, k2 фигурируют только в виде разности, что позволяет свернуть две суммы по времени до одной, следуя таблице 3. Таблица 3 Индексы двойного суммирования и суммирования по диагоналям двойной суммы n = k1 - k2 Table 3 The indexes of double summation and summation over double sum diagonal lines n = k1 - k2
Учитывая это, формула (6) примет вид
Проверим правильность полученного выражения (8). Рассмотрим частный случай - прямоугольный радиоимпульс с постоянной несущей частотой, то есть при N=1, M=1. Тогда из (8) имеем
Формула (9) полностью совпадает с известным выражением для функции неопределенности прямоугольного радиоимпульса длительностью tИ (см. [4, 5]).
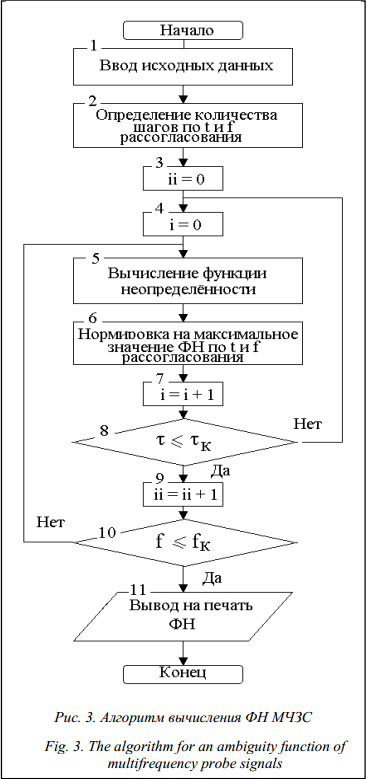
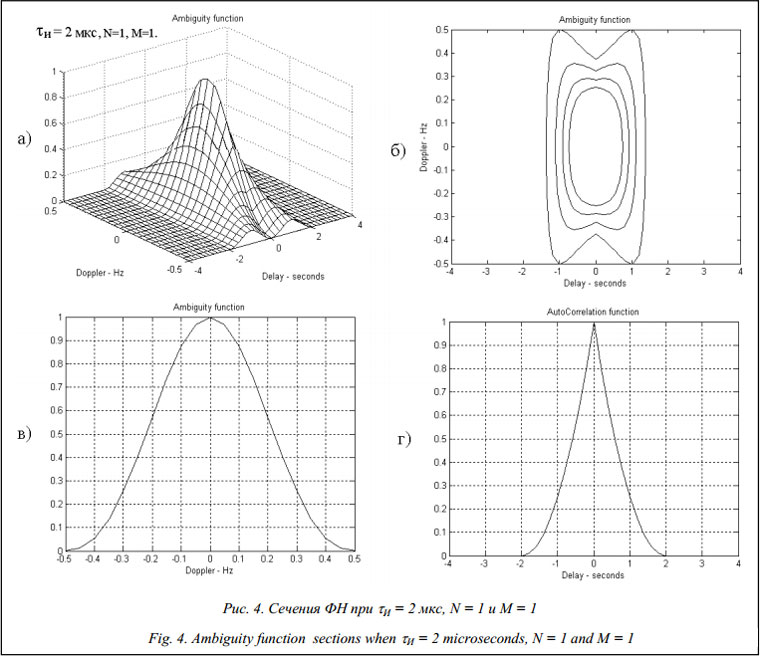
Таким образом, получено универсальное аналитическое выражение для функции неопределенности широкополосных когерентных МЧЗС двух видов – разомкнутых и сомкнутых ЧМ-сигналов для использования при получении дальностных портретов в обзорных РЛС. Полученные выражения могут быть использованы при моделировании и оценке параметров функции неопределенности МЧЗС. Алгоритм вычисления и результаты исследования ФН МЧЗС Для исследования ФН пачки прямоугольных импульсов с разными частотами с нормировкой на максимальное значение тела неопределенности был разработан алгоритм, представленный на рисунке 3. Алгоритм состоит из следующих этапов расчета. 1. Ввод исходных данных: tИ – длительность импульса; Т – период повторения импульсов в пачке; Q – скважность (Q = Т /tИ); N – число импульсов в малой пачке (одной частоты ); M – число малых пачек (число частот); dF – изменение частоты от подпачки к подпачке (от малой пачки к малой пачке); b = 1 /tИ – ширина спектра импульса. 2. Определение количества шагов по времени и частоте рассогласования. 3. Установка начального значения счетчика по времени ii = 0. 4. Установка начального значения счетчика по частоте i =0. 5. Вычисление функции неопределенности по формулам (6) или (8). 6. Нормировка на максимальное значение функции неопределенности по времени и частоте рассогласования. 7. Обновление значения счетчика по частоте i = i +1. 8. Проверка условия выхода из цикла по частоте i. 9. Обновление значения счетчика по времени ii = ii +1. 10. Проверка условия выхода из цикла по времени ii. 11. Вывод на печать ФН в виде ненормированных и нормированных значений ФН 3D-графика, квадрата ФН 3D-графика, сечений ФН и квадрата ФН равного уровня (контуров), а также ФН при t= 0 и при F= 0. На основе предложенного алгоритма разработана программа расчета ФН МЧЗС на языке инженерных и математических вычислений MATLAB 6.5. На рисунке 4 показывается справедливость формул (6) и (8) при N = 1, M = 1 и длительности импульса 2 мкс. Вид ФН совпадает с известными характеристиками, представленными в [4, 5].
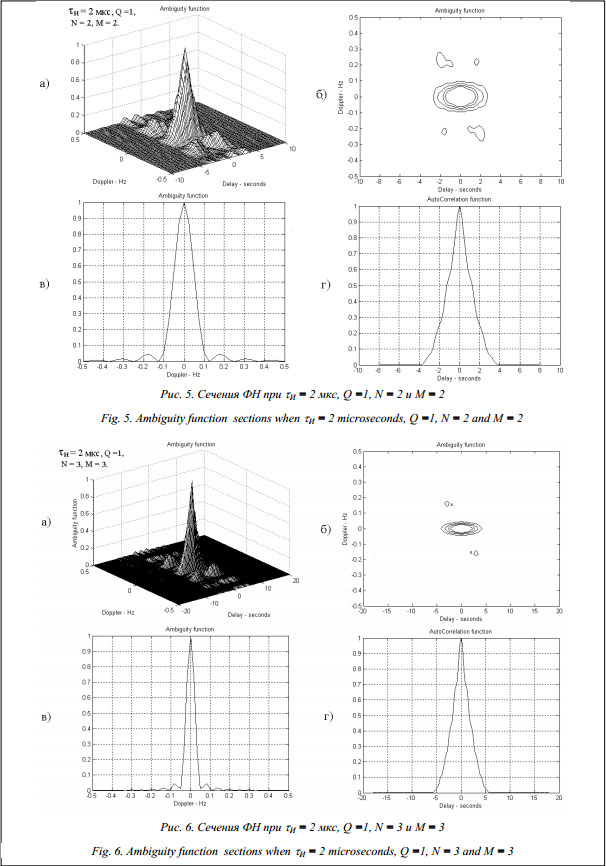
На рисунках 5 и 6 показан вид нормированных ФН в виде 3D-графика (а), квадрата нормированных ФН в виде сечений равного уровня (контуров) (б) и их сечений (в) и (г) при различных параметрах МЧЗС. На основании изложенного можно сделать следующие выводы. Для оценки разрешающей способности РЛС по радиальной дальности получено универсальное аналитическое выражение для функции неопределенности широкополосных когерентных МЧЗС двух видов – разомкнутых и сомкнутых когерентных МЧЗС. С этой целью используется общее симметричное выражение комплексных функций рассогласования для когерентных сигналов с единичной энергией. Для исследования функции неопределенности пачки прямоугольных импульсов с разными частотами с нормировкой на максимальное значение тела неопределенности были разработаны алгоритм и программа расчета ФН МЧЗС на языке инженерных и математических вычислений MATLAB 6.5. Представлены результаты исследования ФН при различных параметрах МЧЗС. Для частных случаев полученное выражение совпадает Алгоритм вычисления и исследования функции неопределенности отличается от известных новыми соотношениями, учитывающими вариации параметров многочастотных зондирующих сигналов в пределах их длительности, и новыми процедурами численного определения функции неопределенности, обеспечивающими сокращение вычислительных затрат. Полученные выражения могут быть использованы при моделировании и оценке функции неопределенности при различных параметрах МЧЗС, используемых для получения дальностных портретов в интересах распознавания классов и типов ВО лицом, принимающим решение при выборе системы распознавания РЛС и сравнении альтернативных вариантов. Литература 1. Митрофанов Д.Г., Гусев М.Д., Денисов А.В., Борто- вик В.В. Способ построения двумерного радиолокационного изображения воздушной цели по траекторным нестабильностям ее полета. Патент РФ № 2180445. 2000. 2. Бортовик В.В., Митрофанов Д.Г. [и др.]. Способ построения двумерного радиолокационного изображения воздушной цели. Патент РФ № 2234110, 2002. 3. Ковалев С.В., Нестеров С.М., Скородумов И.А., Травкин А.А. Формирование радиолокационных изображений объектов при многочастотном импульсном зондировании // Радиотехника (журнал в журнале). 2007. № 6. С. 23–27. 4. Теоретические основы радиолокации; [под ред. Я.Д. Ширмана]. М.: Сов. радио, 1970. 560 с. 5. Кук Ч., Бернфельд М. Радиолокационные сигналы; [пер. с англ. под ред. В.С. Кельзона]. М.: Сов. радио, 1971. 568 с. References 1. Mitrofanov D.G., Gusev M.D, Denisov A.V., Borto- vik V.V. Sposob postroeniya dvumernogo radiolokatsionnogo izobrazheniya vozdushnoy tseli po traektornym nestabilnostaym eyo poleta [Air target 2-dimensional radar image technology using flight path instability]. Patent 2180445 (RF), June 6, 2000. 2. Bortovik V.V., Mitrofanov D.G., Safonov A.V., Nikola- ev A.V., Zotov M.Yu., Mitrofanov A.D., Prokhorkin A.G. Sposob postroeniya dvumernogo radiolokatsionnogo izobrazheniya vozdushnoy tseli [Air target 2-dimensional radar image technology]. Patent 2234110 (RF), 2002. 3. Kovalev S.V., Nesterov S.M., Skorodumov I.A., Trav- kin A.A. Radar imaging for objects using multifrequency pulse sounding. Radiotekhnika [Radioengineering]. 2007, no. 6, pp. 23–27 (in Russ.). 4. Shirman Ya.D. (Ed.) Teoreticheskie osnovy radiolokatsii [Theoretical basis of radar detection]. Moscow, Sov. radio Publ., 1970, 560 p. 5. Cook Ch., Bernfeld M. Radar Signals. Academic Press Inc., NY, 1967 (Russ. ed.: Kelzon V.S. Radiolokatsionnye signaly. Moscow, Sov. radio Publ., 1971, 568 p.) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) , тогда
, тогда .
. (8)
(8) (9)
(9)
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=3868 |
Версия для печати Выпуск в формате PDF (5.36Мб) Скачать обложку в формате PDF (1.03Мб) |
| Статья опубликована в выпуске журнала № 3 за 2014 год. [ на стр. 105-112 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Показатели безопасности космического аппарата в полете и генерация информации для предупреждения о высокоскоростном взаимодействии
- Рекурсивный алгоритм точного расчета ранговых критериев проверки статистических гипотез
- Способы реализации алгоритмов интегральных преобразований изображений по линиям
- Комплекс программ идентификации точечных дефектов листового стекла
- Поиск регулярных решеток на текстуре фасадов зданий
Назад, к списку статей