Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Диагностирование электромеханических систем на основе нейросетевых технологий
Аннотация:Предложены структурная схема и аппаратная реализация аппаратуры для диагностики технических состояний электромеханических систем (ЭМС), включающей блок сбора, кодирования, формирования группового сигнала контроля технического состояния ЭМС, его передачи в канал связи и блок приема группового сигнала контроля технических состояний ЭМС, первичной обработки, распаковки и нейросетевого анализа. Основным элементом аппаратных средств нейросетевой системы диагностирования ЭМС является нейросетевое устройство, с выхода которого снимаются выходные реакции нейронной сети решений относительно технических состояний ЭМС. Установлена целесообразность использования нейрочипов в системах встроенной диагностики технических состояний ЭМС, а нейрокомпьютерные и транспьютерные вычислительные системы целесообразно использовать, когда блок сбора, кодирования, формирования, передачи группового сигнала контроля технических состояний ЭМС и блок приема группового сигнала контроля технических состояний ЭМС, первичной обработки, распаковки и нейросетевого анализа разнесены в две зоны. Предлагаемое специальное ПО для диагностики состояний ЭМС включает программно-математические модули предварительной статистической обработки массивов измеряемых параметров ЭМС, модули синтеза моделей и модули использования синтезированных моделей в зависимости от класса решаемых задач кон-троля технических состояний. Проведено исследование возможности применения ПО вариантов нейронных сетей для диагностирования сложных электромеханических систем с заданной достоверностью. Приведены результаты исследований.
Abstract:The authors suggest a block diagram and hardware implementation of equipment for electromechanical systems (EMS) technical condition diagnostics. EMS include an acquisition unit, encoding unit, a unit that forms a group control signal of EMS technical condition, its transmission to a communication channel and to a receiving unit for the EMS technical condition group control signal, primary processing unit, extraction and neural network analysis units. The main element of EMS diagnosing neural network system hardware facilities is the neural network device, which shows the output response of a decision neural network regarding EMS technical condition. The article proves the feasibility of using neural chips in embedded diagnostics systems of EMS technical condition. At the same time neurocomputer and transputer computing systems are useful when the unit of collection, coding, generation, transmission of EMS technical condition group control signal is in one zone, and the receiving unit of the EMS technical condition group control signal, its primary processing, extraction and neural network analysis is in another zone. Suggested special software for diagnosing EMS states includes software and mathematical modules for preliminary statistical processing of measured EMS parameters arrays, modules for models synthesis, as well as modules for using synthesized models depending on the class of technical condition control tasks. The paper shows a research on the possibility of applying software of neural networks options for diagnosing complex EMS with a given reliability. There are results of this study.
| Авторы: Палюх Б.В. (pboris@tstu.tver.ru) - Тверской государственный технический университет (профессор), г. Тверь, Россия, доктор технических наук, Шпрехер Д.М. (shpreher-d@yandex.ru) - Новомосковский институт РХТУ им. Д.И. Менделеева (доцент), Новомосковск, Россия, кандидат технических наук, Богатиков В.Н. (VNBGTK@mail.ru) - Тверской государственный технический университет (профессор), Тверь, Россия, доктор технических наук | |
| Ключевые слова: нейронная сеть, контроль работоспособности, электромеханическая система |
|
| Keywords: neural network, performance control, electromechanical system |
|
| Количество просмотров: 9673 |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
В настоящее время все большее значение приобретают обеспечение эксплуатационной надежности электромеханического оборудования, проверка и определение его состояния без осуществления демонтажа, прогнозирование технического состояния и обеспечение безопасности функционирования. Для этого необходимы средства, позволяющие оценить состояние оборудования на данный момент, проследить изменения состояния за последнее время и сделать прогноз на ближайшее будущее.
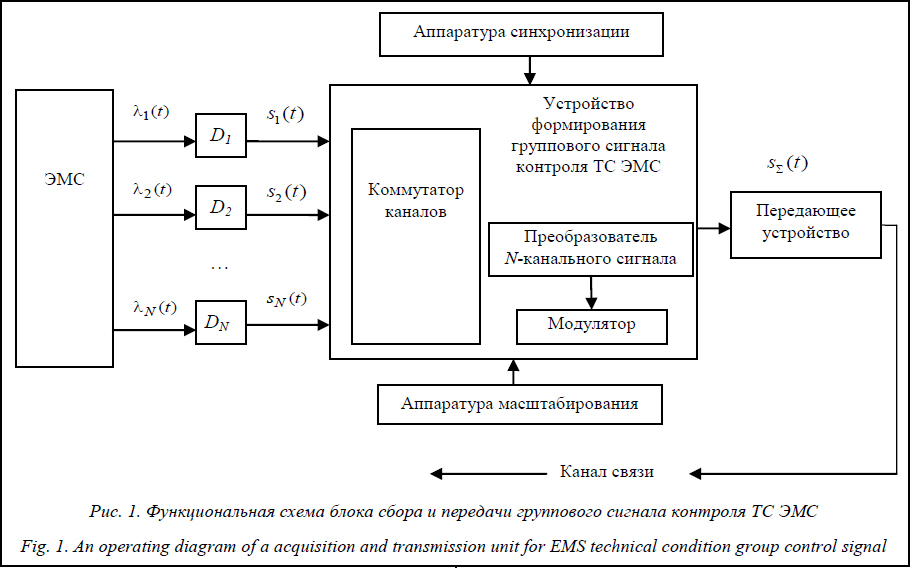
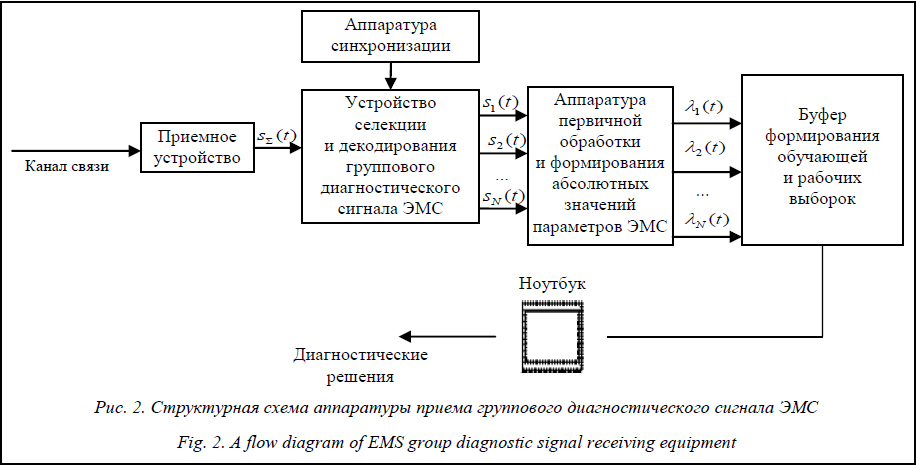
Структура аппаратуры диагностики технического состояния электромеханической системы на нейросетевой базе Аппаратура диагностики технического состояния (ТС) электромеханических систем (ЭМС) на нейросетевой базе предназначена для одновременного измерения, передачи, приема и обработки массивов информации с целью оценки ее работоспособности. Оценка работоспособности ЭМС на практике представляет собой нейросетевой контроль ЭМС и всех ее подсистем для получения информации о фактическом и прогнозном значениях параметров, характеризующих ТС ЭМС, и определение вида ТС нейросетевыми средствами и алгоритмами. Для этой цели при эксплуатации ЭМС предлагаемая аппаратура диагностики ТС должна включать два основных блока [1]: – блок сбора, кодирования, формирования группового сигнала контроля ТС и его передачи по проводным или беспроводным каналам связи (рис. 1); – блок приема группового сигнала контроля ТС, его первичной обработки, распаковки и нейросетевого анализа. С помощью датчиков Di, i=1, …, N, устанавливаемых в различных точках контролируемого объекта – ЭМС, производится преобразование физических величин li, i=1, …, N, подлежащих контролю в ЭМС, в электрические сигналы Si(t), i=1, …, N, которые подаются на входы информационных каналов устройства формирования группового диагностического сигнала ЭМС – SS(t), откуда тот передается по каналу связи в диспетчерский центр для анализа (рис. 2). Так как входной образ для нейросетевых устройств диагностики – это групповой сигнал контроля ТС ЭМС, представляющий собой последовательность отчетов контролируемых параметров от всех измерительных каналов за один цикл измерения, блок сбора и передачи данных является многоканальным. Количество каналов блока определяется числом независимых информационных входов. Структура устройства формирователя группового сигнала контроля ТС ЭМС зависит от метода разделения каналов.
Архитектура нейросетевого блока аппаратуры диагностирования ТС ЭМС В аппаратуре диагностики ТС применена типовая архитектура нейросетевого блока. Его структура, режим функционирования, состав информационного и специального ПО (СПО) оптимально согласованы с назначением автоматизированной системы диагностики ЭМС, определяемым техническим заданием.
При проектировании структуры вычислительных средств аппаратуры диагностики определены следующие аспекты построения системы: – конфигурация аппаратуры диагностики ТС ЭМС (ЭВМ, устройства, каналы передачи данных и связи между ними – система интерфейсов); – режимы функционирования (способы взаимодействия потребителей – элементов системы управления ЭМС с аппаратурой диагностики и организация вычислительных процессов (ввод, хранение, обработка и вывод данных)); – лингвистическое, информационное и программное обеспечение и порядок взаимодействия программ; – базовая структура и характеристики вычислителей (производительность, время ответа, надежность, стоимость и др.). Общей элементной базой нейровычислительного блока аппаратуры диагностики ЭМС как высокопроизводительной системы реального времени можно считать заказные кристаллы (ASIC), встраиваемые микроконтроллеры (mС), процессоры общего назначения (GPP), программируемые логические интегральные схемы (ПЛИС), транспьютеры, цифровые сигнальные процессоры (DSP), нейрочипы [2, 3]. Любая из перечисленных технологий дает возможность организовать нейровычисления в реальном масштабе времени, однако наибольшее использование при реализации нейровычислителей нашли ПЛИС, DSP и транспьютеры. Транспьютероподобные элементы являются важными для построения вычислительных систем с массовым параллелизмом, а их применение в виде решеток процессорных элементов делает возможным реализацию локально-неоднородных сетей, позволяющих осуществлять функции встроенной оценки ТС с предобработкой и локальной коммутацией результатов мониторинга ТС ЭМС. Построение нейровычислителей на базе ПЛИС позволяет гибко реализовать различные нейросетевые парадигмы. Нейрочипы предлагается использовать в системах встроенной диагностики ЭМС, нейрокомпьютерные и транспьютерные вычислительные системы (в том числе на базе сигнальных процессоров) – в случае, когда блоки первичной обработки, распаковки и нейросетевого анализа разнесены в две зоны и между ними организованы высокоскоростные каналы связи (табл. 1).
Нейросетевой вычислитель может формироваться из набора транспьютеров, которые функционируют параллельно и взаимодействуют через последовательные линии связи по принципу «каждый с каждым». При этом в структуре самого нейровычислителя, как правило, выделяют две основные части: – управляющую часть компьютерной системы, реализованную на основе обычной высокопроизводительной вычислительной системы (на базе серверов) с CISC- или RISC-микропроцессорами; – конфигурируемую нейросетевую среду, подключаемую к управляющей части компьютерной системы посредством внутренних (внешних) системных интерфейсов и выполняющую основные вычислительные операции при выводе суждений оценки работоспособности. Таблица 1 Характеристики отечественных нейрочипов для построения блока нейровычислений в системе диагностики ЭМС Table 1 The features of domestic neural chips to create a neural computing block in the EMS diagnostic system
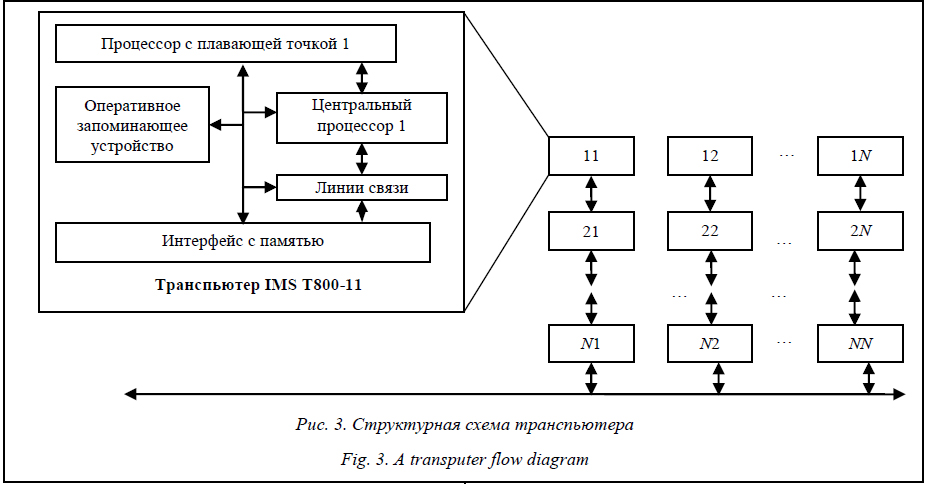
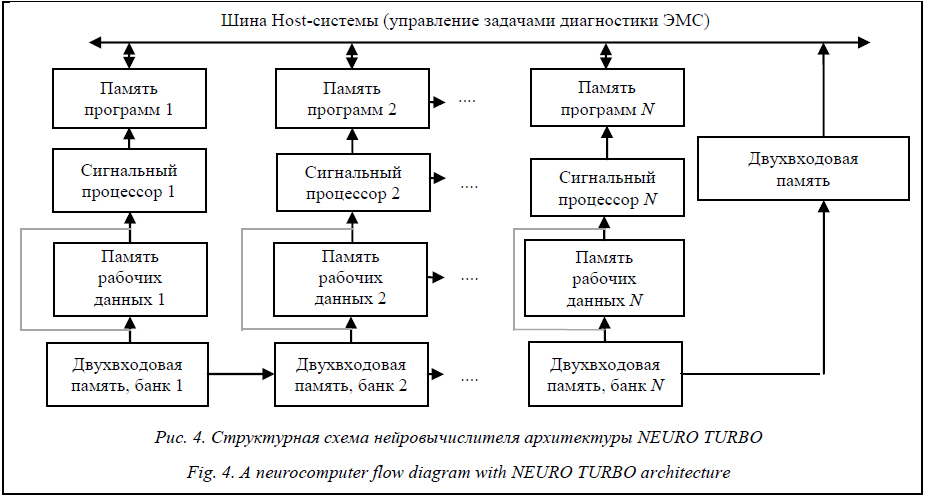
Примененная в аппаратуре диагностики архитектура транспьютера, которая, в свою очередь, конфигурируется в нейронную сеть (НС), представлена на рисунке 3. Структура нейровычислителя на базе сигнальных процессоров МВ86232 [3] показана на рисунке 4. Нейроплата на основе сигнальных процессоров МВ86232 с собственной памятью до 4 Мб позволяет осуществлять моделирование НС, содержащей более 1 000 нейронов. Структура НС включает в себя входной, промежуточный и выходной уровни (наибольшее число скрытых сло- ев – два (ограничение по памяти)). Для обучения нейрокомпьютера используются оригинальные фирменные алгоритмы: алгоритм виртуального импеданса, алгоритм скорректированного обучения и алгоритм расширенного обучения [4–7].
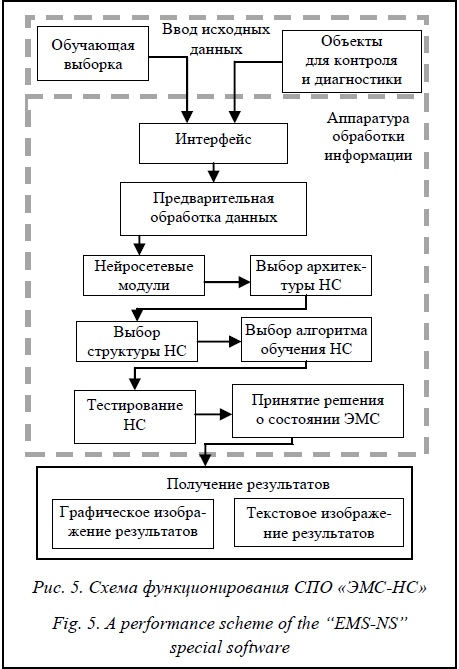
Структура СПО диагностирования ТС ЭМС Предлагаемое СПО с использованием НС предназначено для повышения эффективности и автоматизации управленческих решений специалистов, эксплуатирующих электромеханическое оборудование. Для корректного функционирования СПО требуются ОС Microsoft Windows XP или Microsoft Windows 7, Excel и Word [8]. Данное СПО представляет собой исследовательский прототип, но при необходимости может быть доведено до промышленной реализации и использоваться на любом промышленном предприятии для диагностики ТС ЭМС, работающих в сложных условиях, в том числе и тогда, когда непосредственный доступ к оборудованию затруднен или невозможен. СПО нейросетевой системы оценки работоспособности ЭМС имеет два режима функционирования: – режим синтеза параметров диагностических моделей (режим исследования или режим администратора СПО); – режим использования диагностических моделей по сформированным диагностическим выборкам (режим работы или режим пользователя СПО). Схема функционирования СПО «ЭМС-НС» представлена на рисунке 5. На данное ПО диагностирования ТС ЭМС получено свидетельство об официальной регистрации программы для ЭВМ [8].
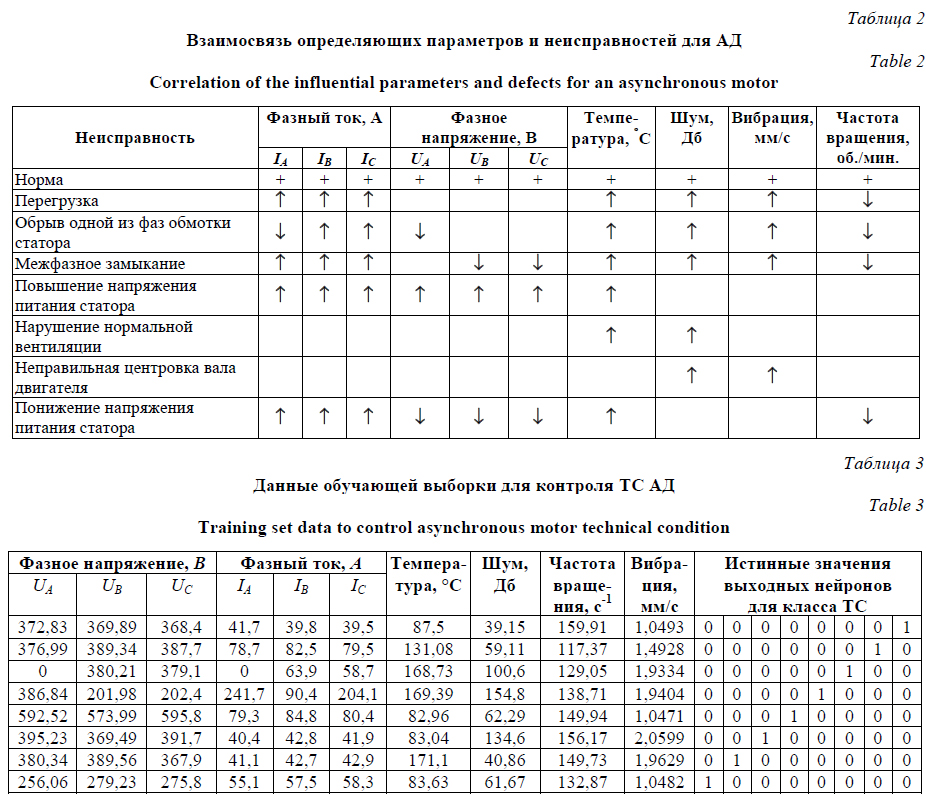
Экспериментальные исследования ТС ЭМС. Объект исследования – асинхронный электродвигатель Возможности контроля ТС ЭМС на основе многослойных НС рассмотрим на примерах данных эксплуатации асинхронного электродвигателя (АД). Контроль ТС АД будет заключаться в отнесении предъявляемого к распознаванию состояния АД к одному из возможных классов (неисправностей), указанных в таблице 2, с помощью специально построенного решающего правила СПО-НС. В качестве модели распознавания классов ТС ЭМС использовался многослойный нейросетевой классификатор с числом скрытых слоев от 1 до 4. В качестве алгоритмов распознавания реализован метод наискорейшего спуска. Алгоритм является открытым и настраиваемым, возможно дополнение его новыми диагностическими признаками. Входной слой НС должен содержать количество нейронов, равное количеству диагностируемых параметров (числу столбцов в табл. 2), а выходной слой – количество нейронов, соответствующее количеству классов диагностируемых неисправностей плюс нормальный режим (числу строк в табл. 2).
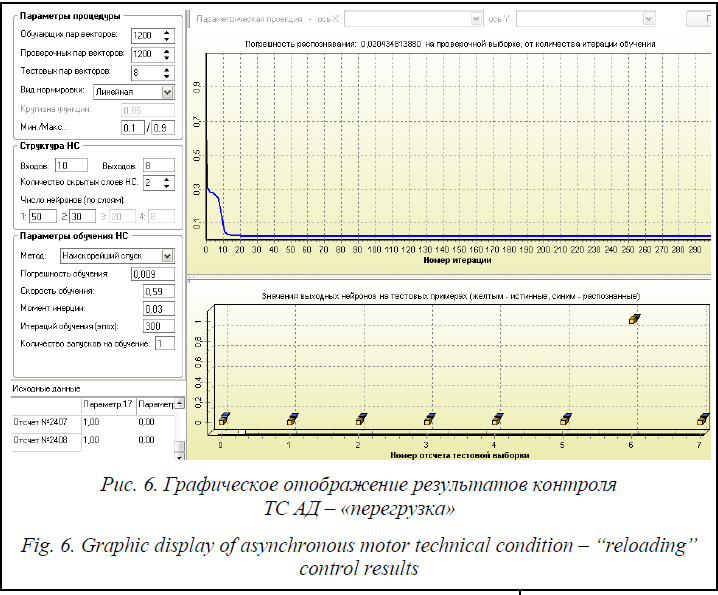
Для обучения классификатора набрана статистика соответствия диагностических признаков классам ТС, для этого модифицировались значения измеряемых параметров путем 5-процентного изменения их значений для каждого режима работы соответственно и был создан массив диагностических параметров АД. Каждый вид ТС ЭМС кодируется с помощью бинарного кода, состоящего из 8 разрядов (по числу выявляемых ТС и соответственно числу нейронов в выходном слое НС). Каждый разряд соответствует сигналу выходного нейрона классификатора. В таблице 3 показан фрагмент обучающей выборки для электродвигателя ЭДКО3, 5-40У5 [9]. Исходный массив диагностических параметров АД (обучающей выборки) после загрузки в программный модуль «ЭМС-НС» визуализируется в нижней левой части рабочей области главного окна СПО (рис. 6). Затем происходит запуск классификатора на обучение. После подачи на вход классификатора тестового примера он выдает информацию о виде распознанного ТС. На рисунке 6 код распознанного ТС АД равен бинарному вектору 00000010, что соответствует режиму работы АД «перегрузка». Здесь показан результат распознавания ТС в виде истинных (желтые квадраты) и реальных (синие треугольники) значений выходных нейронов. Текстовые результаты диагностики всех ТС АД сведены в таблицу (табл. 4). Различия между распознанными и истинными значениями бинарных векторов, определяющих класс ТС элемента ЭМС (АД), не превышают 5 % погрешности распознавания, а это говорит о том, что контролируемые неисправные состояния выявляются.
На основании изложенного можно сделать следующие выводы. Предлагаемый способ диагностирования ЭМС, включающий аппаратуру диагностики ТС, в основе которой лежит СПО, содержащее нейросетевой классификатор, позволяет устранить постепенные отказы оборудования, что значительно повышает его эксплуатационную надежность. Экспериментальные стендовые исследования аппара- туры диагностики ТС ЭМС в режиме контроля ТС АД показали, что достоверность выявления отказа элементов ЭМС составляет 0,95. На примере исследования различных элементов ЭМС показано, что применительно к ЭМС наиболее быстрым методом обучения НС является метод Левенберга–Марквардта [2, 4], обеспечивающий заданную погрешность обучения при минимальном количестве циклов обучения. Зависимость достоверности распознавания ТС ЭМС рассматриваемого типа от шага обучения НС имеет оптимальные значения при различных объемах обучающей выборки, оптимальный шаг обучения лежит в пределах от 0,0095 до 0,019.
Достоверность диагностики ТС ЭМС от числа скрытых слоев НС при различном количестве нейронов в слое для режима контроля ТС позволяет определить количество слоев НС и число нейронов в слое, максимальное число нейронов в скрытых слоях следует принимать от 20 до 30. Литература 1. Шпрехер Д.М. Создание программно-аппаратного комплекса для нейросетевой системы диагностирования электромеханических систем горных машин // Изв. вузов: Горный журнал. 2012. № 5. С. 98–101. 2. Галушкин А.И. Некоторые исторические аспекты развития элементной базы вычислительных систем с массовым параллелизмом (80-е и 90-е годы) // Нейрокомпьютер. 2000. № 1. С. 68–82. 3. Шахнов В., Власов А., Кузнецов А., Поляков Ю. Нейрокомпьютеры – архитектура и реализация. Ч. 3. Аппаратная реализация нейровычислителей (окончание) // Chip News (инженерная микроэлектроника). 2001. № 1. С. 24–29. 4. Кирсанов Э.Ю. Цифровые нейрокомпьютеры: архитектура и схемотехника; [под ред. А.И. Галушкина]. Казань: Изд-во Казанского гос. ун-та, 1995. С. 31–32. 5. Комарцова Л.Г., Максимов А.В. Нейрокомпьютеры: учеб. пособие для вузов. М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. 400 с. 6. Логовский А.С. Технология ПЛИС и ее применение для создания нейрочипов // Открытые системы. 2000. № 10. С. 23–29. 7. Проблемы построения и обучения нейронных сетей; [под ред. А.И. Галушкина и В.А. Шахнова]. М.: Машиностроение, 1999. 105 с. 8. Шпрехер Д.М. Программа диагностирования технического состояния электромеханических систем («ЭМС-НС»). Свид. о гос. регистр. прогр. для ЭВМ № 2010611531. 9. Стариков Б.Я., Азарх В.Л., Рабинович З.М. Асинхронный электропривод очистных комбайнов. М.: Недра, 1981. 288 с. |
 Достоверность распознавания ТС ЭМС в за- висимости от числа итераций и эпох обучения сначала растет до определенного предела, а затем сохраняется практически неизменной, причем с увеличением объема обучающей выборки достоверность возрастает. Экспериментальные исследования показали, что число итераций обучения, обеспечивающих приемлемую достоверность, не следует брать выше 2 000, чтобы не увеличивать бессмысленно время обучения.
Достоверность распознавания ТС ЭМС в за- висимости от числа итераций и эпох обучения сначала растет до определенного предела, а затем сохраняется практически неизменной, причем с увеличением объема обучающей выборки достоверность возрастает. Экспериментальные исследования показали, что число итераций обучения, обеспечивающих приемлемую достоверность, не следует брать выше 2 000, чтобы не увеличивать бессмысленно время обучения.| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4020 |
Версия для печати Выпуск в формате PDF (8.21Мб) Скачать обложку в формате PDF (1.09Мб) |
| Статья опубликована в выпуске журнала № 3 за 2015 год. [ на стр. 5-11 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Разработка нейронной сети для оценки исправности гидроагрегата по результатам вибромониторинга
- Кластеризация документов проектного репозитария на основе нейронной сети Кохонена
- Информационная и алгоритмическая поддержка интеллектуальной системы экологического мониторинга воздуха на основе нейронных сетей
- Интеллектуальные системы и алгоритмы управления объектами обстановки в тренажерах
- Исследование влияния алгоритмов инициализации весовых коэффициентов сети Вольтерри на решение задачи прогнозирования
Назад, к списку статей