Journal influence
Bookmark
Next issue
Automatic system for vehicle detection and recognition in image
The article was published in issue no. № 1, 2010Abstract:Automatic system for vehicle detection and recognition in image is developed. Construction and operation principles of such systems are considered. Developed system advantage over in force analogue is experimentally proved.
Аннотация:Разработана автоматическая система обнаружения и распознавания автотранспортных средств на изображении. Рассмотрены принципы построения и функционирования таких систем. Проведены эксперименты, показывающие превосходство разработанной системы над действующим аналогом.
| Authors: Subbotin S.A. (subbotin@zntu.edu.ua) - Zaporizhzhya National Technical University, Zaporizhzhya, Ph.D, (subbotin@zntu.edu.ua) - | |
| Keywords: learning sample, region of interest, template method, identification, automatic system |
|
| Page views: 17172 |
Print version Full issue in PDF (4.03Mb) Download the cover in PDF (1.25Мб) |
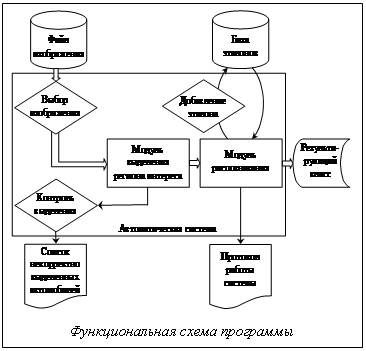
Увеличение интенсивности транспортного потока на автомагистралях, а также варьирующиеся скоростные ограничения для различных видов транспортных средств обусловили актуальность проблемы автоматизации контроля за соблюдением правил дорожного движения и перемещением транспортных средств. Это, в свою очередь, вызвало необходимость распознавания класса транспортного средства, проверки соблюдения правил дорожного движения для транспортных средств данного класса и идентификации автомобиля нарушителя посредством распознавания его номерного знака. Входной информацией для системы обнаружения и распознавания является изображение части дороги, возможно, содержащее автомобиль, полученное фотокамерой, расположенной над дорожным полотном по движению транспорта под углом к горизонту. Автоматическая система должна определять присутствие автомобиля на изображении, локализовать его (определять границы области изображения), а также распознавать тип автотранспортного средства (легковой, грузовой автомобиль, микроавтобус, автобус, спецмашина и т.д.). Система должна работать в реальном масштабе времени и обеспечивать достаточную точность обнаружения и распознавания. Задача обнаружения и распознавания автомобилей осложняется тем, что изображения, получаемые в реальных условиях в различное время суток и при различных погодных условиях, отличаются сильной зашумленностью, сменяющейся сложным фоном (из-за обилия теней от различных объектов в различное время суток), частичным попаданием автомобиля в кадр. Анализ методов и систем обнаружения и распознавания транспортных средств Для обнаружения автомобиля на изображении (выделение региона интереса) применяют различные методы. Метод, основанный на анализе потокового видео, учитывает то, что распознаются движущиеся объекты – автомобили, при последовательном сравнении соседних кадров видеопоследовательности [1]. Другой метод основан на нахождении фрагментов-кандидатов на различные части автомобиля путем сравнения с эталонами фрагментов исходного изображения [2] либо фрагментов карт ребер [3]. Такой подход применим при наличии на изображении достаточного количества хорошо различающихся существенных элементов автомобиля, что справедливо в большей степени для видов изометрических проекций рассматриваемых автомобилей. Для видов сзади и сзади-сверху наиболее эффективно показали себя методы, основанные на определенных преобразованиях и анализе карт ребер, как это было реализовано наряду с анализом видеопотока в системе, описанной в [1]. При съемке с такого ракурса автомобили симметричны относительно серединной вертикальной оси, но степень этой симметрии, как и симметрии относительно серединной горизонтальной оси, различна у разных классов автомобилей. Одним из универсальных методов нахождения и классификации объектов на изображении является поиск по шаблону [4]. Подходы к поиску по шаблону отличаются способами представления изображения и шаблонов, способом сравнения и критериями совпадения фрагмента изображения с шаблоном. Так, авторы статей, описывающих рассмотренные системы, для решения задачи классификации предлагают использовать нейронные сети [3] и метод эталонов. Таким образом, для отыскания автотранспортного средства на статическом изображении целесообразно применять интеллектуальный анализ реберных карт и модифицированный поиск по шаблону [4]. Распознавание предлагается осуществлять при помощи метода эталонов. Архитектура системы Для обеспечения достаточной гибкости и переносимости на другие платформы система имеет модульную структуру и состоит из пяти взаимодействующих модулей: выделения региона интереса, распознавания, фильтрации, метода эталонов, графического интерфейса пользователя. Модуль выделения региона интереса содержит интеллектуальные элементы отыскания автотранспортного средства на изображении сцены и использует результат преобразований, выполняемых модулем фильтрации классов. Функции модуля фильтрации позволяют выполнять различные преобразования изображений, реализуют методы адаптивного подавления шумов, смазывания, рассеивания, нахождения наиболее ярких областей изображения, построения градиентных карт и карт ребер, а также отыскивают регион интереса для общей задачи. Модуль распознавания осуществляет преобразование изображения найденного автотранспортного средства к набору признаков, которые затем используются модулем метода эталонов для классификации. Кроме того, модуль предоставляет данные для классов метода эталонов с целью обучения системы. Модуль метода эталонов включает классы, реализующие работу со структурами данных, хранящих базу эталонов, работу с файлами баз эталонов, а также классы, реализующие базовые функции метода: нахождение расстояния между экземплярами в метрической системе, нормализация значений признаков экземпляра и т.д. В модуле реализован метод кластерного анализа, позволяющий для заданной обучающей выборки получить базу эталонов с заданным значением ошибки классификации. Функциональная схема программы показана на рисунке. Прямоугольниками на ней обозначе- ны функциональные модули, ромбами – управляющие элементы интерфейса пользователя, позволяющие контролировать качество работы системы, оценивая правильность выделения и распознавания на контрольных промежутках обслуживания системы, пополнять базу имеющихся шаблонов в случае стабильного некорректного срабатывания системы в той или иной ситуации, повышая тем самым точность распознавания при ее дальнейшей работе. В автоматизированном режиме работы системы оператор выбирает для обработки изображение или последовательность изображений. Затем каждое выбранное изображение подвергается фильтрации: система делает вывод о присутствии автотранспортного средства на изображении, после чего осуществляется его локализация. При этом оператор имеет возможность визуально контролировать правильность выделения и при необходимости может сообщить системе об ошибке в выделении. Затем данные из модуля выделения региона интереса поступают в модуль распознавания, где с помощью метода эталонов принимается решение об отнесении автомобиля к тому или иному классу. На этом этапе имеется возможность визуального контроля правильности работы системы и пополнения базы эталонов без прерывания работы системы. Работа над каждым изображением протоколируется, а результатом являются точно распознанный класс автомобиля и номер- ной знак (при подключении дополнительного модуля). В автоматическом режиме работы системы обработка производится исключительно в направлении двойной стрелки (см. рис.) после указания пользователем последовательности изображений для обработки. Эксперименты и результаты Оценка качества работы системы осуществлялась операторами-экспертами путем визуального контроля правильности выделения и распознавания, а также сравнивалась с имеющимися результатами работы аналогичной индустриальной системы ASPI, используемой на автотрассах Италии.
После обучения системы на 1555 изображениях обучающей выборки точность распознавания для 2457 изображений тестовой выборки составила 80,5 %. Среднее время работы системы над одним изображением составило 0,6 сек. Для системы ASPI точность распознавания того же набора изображений составила 72 % при средних затратах времени 1,1 сек. на одно изображение. Разработанная автоматическая система об- наружения и распознавания автотранспорта на изображении позволяет определять в реальном масштабе времени класс автомобиля, присутствующего на изображении. Она отличается большей производительностью и точностью по сравнению с действующими системами обнаружения и распознавания транспортных средств и может быть рекомендована для использования на практике. Данная работа выполнена в рамках НИР ООО «МПА Групп» «Разработка математического и информационного обеспечения интеллектуальной системы визуального контроля транспортных средств» (№ 0106U012013) и «Разработка методов и программных средств на основе обучения, распознавания, оптимизации адаптации для принятия решений в автоматизированных системах управления транспортными средствами» (№ 0107U0006781). Литература 1. Betke M., Haritaoglu E., Davis L. Multiple vehicle detection and tracking in hard real-time // IEEE Intelligent Vehicles Symposium. Tokyo, Sept. 19–20, 1996. Los Alamitos: IEEE Publishing, 1996, pp. 351–356. |
 Системы распознавания автомобилей наглядно демонстрируют результат своей работы – выделенный регион интереса на изображении на экранной форме, распознанный класс автомобиля, точность распознавания и распознанный номерной знак, которые также протоколируются.
Системы распознавания автомобилей наглядно демонстрируют результат своей работы – выделенный регион интереса на изображении на экранной форме, распознанный класс автомобиля, точность распознавания и распознанный номерной знак, которые также протоколируются.| Permanent link: http://swsys.ru/index.php?id=2448&lang=en&page=article |
Print version Full issue in PDF (4.03Mb) Download the cover in PDF (1.25Мб) |
| The article was published in issue no. № 1, 2010 |
Perhaps, you might be interested in the following articles of similar topics:
- Использование энтропийных мер в задачах оценки информативности признаков распознавания образов
- Разработка алгоритма направленного распознавания с учетом информации о рельефе на примере спутниковых снимков и данных дистанционного зондирования Земли
- Интерпретатор сигналов на основе нейроподобной иерархической структуры
- Программная реализация системы автоматической идентификации слябов
- Программное обеспечение навыковой системы принятия решений
Back to the list of articles