Journal influence
Bookmark
Next issue
Parallel design algorithm for description of the mass transfer in a pore
The article was published in issue no. № 3, 2012 [ pp. 239-244 ]Abstract:Here is described a model using molecular dynamics approach that describes gas transfer in small pores. Two types of the mass transfer that happen in a pore were taken into account: Knudsen diffusion and molecular diffusion. Two cases of interaction are mentioned that describe molecular movement and interaction. First case describes the variant, where molecules move according to classic mechanics law and where they interact with each other and a wall, on the principle of perfectly elastic collision. It is assumed that the particles can collide with the pore’s wall in two ways: mirror and diffusion, and for each specific collision this way is defined at random fashion, and the ratio of collisions according to both ways presents one of the features of the model. The second case describes molecular interaction using intermolecular potential of Lennard-Jones interaction. Calculation of molecular movement was made with parallel algorithms. Parallel computing is made with the use of CUDA technology. Information about particle features is stored in 3-D array. Number of array cells corresponds to number of particles in the system. Each array cell contains information about particle: coordinates, velocity vector, speed up vector and its type. One dimension array of particle type exists separately. Number of array elements equals to number of types of existing particles. Cells contain information about each substance that is present in the system: particle’s mass and radius, coefficient of molecular interaction potential. The array was arranged with bubble sort algorithm adapted for parallel operation and extended for 3-D case. The article contains basic computation flow charts.
Аннотация:Рассматривается модель на основе метода молекулярной динамики, описывающая перенос газа в порах малого размера. Учитываются два типа переноса вещества, происходящего внутри поры: диффузия Кнудсена и молекулярная диффузия. Для описания движения и взаимодействия молекул рассматриваются два варианта. В первом молекулы движутся по законам классической механики и взаимодействуют друг с другом, а также со стенкой по принципу абсолютно упругого удара. Принимается, что частицы могут сталкиваться со стенкой поры разными способами – зеркальным и диффузным, причем для каждого конкретного соударения способ определяется случайным образом, и соотношение количества соударений по обоим способам является одним из параметров модели. Во втором варианте взаимодействие молекул описывается с применением межмолекулярного потенциала взаимодействия Леннарда–Джонса. Расчет движения молекул проводится с привлечением алгоритмов параллельного вычисления. Организация параллельных вычислений осуществляется с применением технологии CUDA. Для хранения параметров частиц ис-пользуется трехмерный массив. Число ячеек массива соответствует числу частиц в системе. В каждой ячейке массива хранятся параметры какой-либо частицы (координаты, вектор скорости, вектор ускорения и тип). Отдельно существует одномерный массив типов. Количество элементов массива равно количеству типов частиц, присутствующих в системе. В ячейках хранятся параметры каждого из веществ, присутствующих в системе, – масса и радиус частицы, коэффициенты потенциала межмолекулярного взаимодействия. Для упорядочения элементов в массиве применяется алгоритм сортировки пузырьком, приспособленный для параллельной реализации и расширенный для трехмерного случая. Приведены основные блок-схемы расчета.
| Authors: () - , Russia, (que_kola@mail.ru) - , Russia, Koltsova E.M. (kolts@muctr.ru) - D. Mendeleev University of Chemical Technology of Russia (Professor), Moscow, Russia, Ph.D | |
| Keywords: parallel computing, diffusion coefficient, Knudsen diffusion, gas diffusion, molecular dynamics |
|
| Page views: 10482 |
Print version Full issue in PDF (7.64Mb) Download the cover in PDF (1.33Мб) |
Математическая модель на основе метода молекулярной динамики описывает перенос вещества в порах диаметром от 1 до 1000 нм, длиной от 0,01 до 200 мкм, при давлениях от 0,001 до 2 атм. При малых размерах пор перенос вещества [1] происходит как за счет столкновения молекул друг с другом (молекулярная диффузия), так и за счет соударений молекул со стенкой поры (диффузия Кнудсена), причем второй тип преобладает, так как вероятность соударения молекул друг с другом при низком давлении довольно мала. После задания начальных условий (длина, диаметр поры, температура, давление, молекулярная масса газа) производится расчет количества молекул в поре в соответствии с законом Менделеева–Клапейрона Средняя скорость молекул газа рассчитывается из распределения Максвелла–Больцмана. После вычисления средней скорости молекул газа каждой молекуле присваивается определенная скорость с учетом вероятности из распределения Максвелла. Взаимодействие молекул описывается с применением межмолекулярного потенциала взаимодействия Леннарда–Джонса
где r – расстояние между центрами частиц; e – глубина потенциальной ямы; s – расстояние, на котором энергия взаимодействия становится равной нулю. Параметры e и s являются характеристиками молекул соответствующего вещества. С использованием генератора случайных чисел и с учетом распределения давления по поре всем частицам (молекулам) присваиваются начальные координаты их местоположения. Далее координаты положения частиц меняются в соответствии с уравнениями движения. При столкновении со стенкой пересчитываются скорости с учетом зеркального и диффузного механизмов рассеяния. При зеркальном рассеянии частиц происходит абсолютно упругий удар, и частица отлетает от стенки под тем же углом, под которым она приближалась к ней. При диффузном рассеянии новое направление движения частицы определяется с помощью генератора случайных чисел. В обоих случаях модуль вектора скорости остается постоянным. Проверка частиц на столкновение проводится только для наиболее близко расположенных друг к другу частиц, для которых возникает наибольшая вероятность соударения. Организация параллельных вычислений осуществляется с применением технологии CUDA. Преимущество использования технологии параллельного программирования в том, что при моделировании необходимо проводить множество однотипных операций над всеми частицами (проверка на столкновения, численное решение уравнений движения и др.). Для такой задачи хорошо подходят решения на основе принципа SIMD (single instruction-stream, multiple data-stream – один поток команд с несколькими потоками данных), когда вычислительное устройство выполняет операции сразу над несколькими элементами данных за один такт [2]. На этом принципе построена и используемая в данной реализации технология CUDA. Для хранения параметров частиц используется трехмерный массив. Число ячеек массива соответствует числу частиц в системе. В каждой ячейке массива хранятся параметры какой-либо частицы: координаты, вектор скорости, вектор ускорения и тип. Отдельно существует одномерный массив типов. Количество элементов массива равно количеству типов частиц, присутствующих в системе. В ячейках хранятся параметры каждого из веществ, имеющихся в системе, – масса и радиус частицы, коэффициенты потенциала межмолекулярного взаимодействия. В ходе расчета при необходимости получения доступа к этим параметрам они берутся из ячейки с номером, соответствующим типу рассчитываемой частицы.
При параллельной реализации каждый проход по массиву разделяется на 2 этапа. На первом попарно сравниваются элементы с номерами 2i и 2i+1 (нулевой с первым, второй с третьим и т.д.). На втором этапе происходит то же самое, но со сдвигом на 1 позицию, то есть сравниваются 2i+1 и 2i+2 элементы (рис. 2).
Рассмотрим трехмерный массив с размерностью L´M´N. Причем, в отличие от одномерного случая, когда в ячейках массива хранилось всего одно число, в трехмерном случае каждая ячейка будет представлять собой вектор из трех координат (x, y, z). Шаг сортировки для такого массива с применением вышеописанного одномерного алгоритма выбирается следующим образом. Очевидно, что трехмерный массив L´M´N можно представить в виде N´M одномерных массивов из L элементов. Для каждого из этих массивов следует выполнить проход алгоритма сортировки, причем для сравнения значения x брать из ячеек. После этого трехмерный массив будет частично отсортирован по одной из размерностей. Аналогично следует выполнить проход по двум другим размерностям, сравнивая соответствующие координаты, то есть для M-массивов берутся координаты y, а для N-массивов – координаты z. В итоге после такого прохода массив будет частично отсортирован по всем трем координатам. В общем случае для полной сортировки массива проходы должны выполняться до тех пор, пока не прекратятся перестановки элементов, и для изначально неупорядоченного массива таких проходов может быть довольно много. Однако для массивов, в которых значения уже частично упорядочены, особенно для таких, которые образованы несколькими перестановками элементов упорядоченной последовательности, алгоритм показывает хорошую производительность, так как количество проходов в таких случаях довольно мало. Массив частиц следует сортировать после каждого расчета нового положения частиц в пространстве. При таком использовании алгоритма сортировки расположение частиц в ячейках массива будет приближенно соответствовать их положению в пространстве внутри поры в процессе моделирования, что является важным условием для корректного расчета взаимодействия частиц.
Второй этап аналогичен первому, но разбивка на блоки происходит со сдвигом, чтобы учесть столкновения, которые могли бы произойти между частицами, находящимися рядом, но попавшими на первом этапе в разные блоки. Сдвиг идет по всем трем размерностям массива на P/2 позиций. Для организации проверки частиц на соударение со стенкой для каждой частицы в массиве проверяется, выходят ли ее координаты за пределы поры. При положительном результате скорости частицы пересчитываются. При соударении, помимо пересчета скорости, сам факт регистрируется счетчиком соударений. Регистрируются длина свободного пробега частицы от последнего соударения и время, которое прошло с последнего соударения, после чего данные о времени и длине пробега обнуляются. Эти данные необходимы для расчета коэффициента диффузии D частиц в поре. Коэффициент диффузии рассчитывается по формуле
Сила межмолекулярного взаимодействия рассчитывается только для близко расположенных друг к другу частиц. Так как расположение частиц в ячейках отсортированного массива примерно соответствует их положению в пространстве, для каждой ячейки массива в соседних ячейках, вероятнее всего, будут находиться частицы, наиболее близкие к частице в данной ячейке в пространстве поры. Для расчета сил межмолекулярного взаимодействия для каждой частицы в массиве берется совокупность соседей, находящихся в ячейках не более чем в R позициях от данной (рис. 4). Из рисунка 4 видно, что области частиц A и B перекрываются, при этом каждая из частиц попадает в область другой.
Все данные выводятся в удобной для пользователя форме на экран монитора или на запоминающее устройство. Общий алгоритм расчета осуществляется следующим образом. После ввода пользователем параметров моделирования происходят определение размера массива (из уравнения Менделеева–Клайперона) и начальное заполнение массива частицами. Частицам присваиваются тип в соответствии с заданным составом смеси (так как состав задается мольными долями, которые могут быть пересчитаны непосредственно в количество молекул, в итоге количество частиц разных типов в массиве отражает состав смеси), начальные пространственные координаты, начальные скорости (в соответствии с распределением Максвелла). Задаются шаг моделирования по времени и общее время моделирования, текущее время моделирования устанавливается на 0. После этого запускается процесс моделирования массопереноса в поре, который состоит в выполнении над массивом частиц повторяющейся последовательности операций (рис. 5): – частичная сортировка массива одним проходом сортировки (рис. 6), в результате которой будут пересчитаны скорости для столкнувшихся частиц; – фактическое выполнение моделирования (если проверка частиц на столкновение друг с другом не проводится) с учетом только кнудсеновской диффузии, так как частицы не взаимодействуют друг с другом; – проверка частиц на столкновение со стенкой, в результате которой будут пересчитаны скорости столкнувшихся со стенкой частиц; – расчет сил межмолекулярного взаимодействия, в результате которого всем частицам будут приданы соответствующие ускорения; если расчет не проводится, моделирование проходит без учета сил межмолекулярного взаимодействия; – проверка частиц на выход из поры и организация входа частиц в пору; – расчет нового положения частиц в соответствии с уравнениями движения, в результате чего частицам будет присвоено новое положение в пространстве; – сбор статистики для определения выходных данных моделирования; – увеличение текущего времени моделирования на величину шага и проверка, не превысило ли оно заданное время моделирования; при отрицательном результате повторение последовательности (то есть новый шаг по времени), при положительном расчет заканчивается. Применение технологии организации параллельного вычисления CUDA для описания математической модели позволяет существенно быстрее производить расчеты для большого количества молекул N, которое в зависимости от условий (давление, температура, длина, диаметр поры) может варьироваться от 1 до 100 тыс. молекул по сравнению с однопоточной версией программы. Литература 1. Albo S.E., Broadbelt L.J., Snurr R.Q. // AIChE Journal, 2006, Vol. 52, no. 11, pp. 3679–3687. 2. Таненбаум Э. Архитектура компьютера. СПб: Питер, 2007. 5-е изд. 844 c. 3. Левитин А.В. Алгоритмы: введение в разработку и анализ. М.: Изд-во «Вильямс», 2006. 576 с. |
 , где NA – число Авогадро; V – объем поры.
, где NA – число Авогадро; V – объем поры.
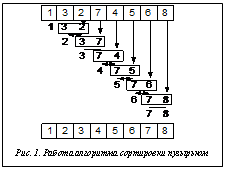 Алгоритм для сортировки частиц требует упорядоченности массива по координатам частиц. Для упорядочения элементов применяется простой алгоритм сортировки пузырьком [3], приспособленный для параллельной реализации, и расширенный – для трехмерного случая. Пусть имеется одномерный неупорядоченный массив a из n элементов. Алгоритм состоит в повторяющихся проходах по сортируемому массиву. За каждый проход элементы последовательно сравниваются попарно и, если порядок в паре неверный, выполняется их обмен (рис. 1). Проходы по массиву повторяются до тех пор, пока не окажется, что обмены больше не нужны, это означает, что массив отсортирован.
Алгоритм для сортировки частиц требует упорядоченности массива по координатам частиц. Для упорядочения элементов применяется простой алгоритм сортировки пузырьком [3], приспособленный для параллельной реализации, и расширенный – для трехмерного случая. Пусть имеется одномерный неупорядоченный массив a из n элементов. Алгоритм состоит в повторяющихся проходах по сортируемому массиву. За каждый проход элементы последовательно сравниваются попарно и, если порядок в паре неверный, выполняется их обмен (рис. 1). Проходы по массиву повторяются до тех пор, пока не окажется, что обмены больше не нужны, это означает, что массив отсортирован.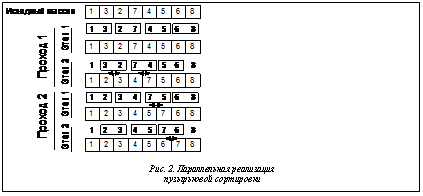 В результате после прохода массив становится частично отсортированным, как и в оригинальном алгоритме, однако в пределах одного этапа все сравнения могут выполняться параллельно. Понадобится n/2 потоков, каждый из них обработает одну пару элементов. Так как не будет происходить перекрывание данных, алгоритм не требует блокировок и все потоки могут выполняться одновременно.
В результате после прохода массив становится частично отсортированным, как и в оригинальном алгоритме, однако в пределах одного этапа все сравнения могут выполняться параллельно. Понадобится n/2 потоков, каждый из них обработает одну пару элементов. Так как не будет происходить перекрывание данных, алгоритм не требует блокировок и все потоки могут выполняться одновременно.
 , где ávñ – средняя скорость частиц в системе; álñ – средняя длина свободного пробега.
, где ávñ – средняя скорость частиц в системе; álñ – средняя длина свободного пробега.


| Permanent link: http://swsys.ru/index.php?id=3251&lang=en&page=article |
Print version Full issue in PDF (7.64Mb) Download the cover in PDF (1.33Мб) |
| The article was published in issue no. № 3, 2012 [ pp. 239-244 ] |
Perhaps, you might be interested in the following articles of similar topics: