Journal influence
Bookmark
Next issue
A specialized ship dynamic positioning system
Abstract:The article considers an approach to providing ship positioning in commission using automatic identification systems (AIS) with the assessment of the possibility to increase the accuracy of designated position retention when implementing a centralized measurement method. It also considers an approach to developing the structure of a ship automated control system that provides automated control of the ship during joint maneuvers. The approaches are based on the fact that currently it is possible to determine a ship's place continuously and accurately according to satellite radio navigation systems. This provides an efficient navigation support for activities of forces through automated processing and providing navigation data to a user. At the same time, capacity and high-speed data exchange is an important issue in activities of forces. It is essential in the process of managing the Navy forces and means in a rapidly changing environment and increasing in information flows. The practice of the Navy demonstrated the need to create a remote control system for tactical objects. It should solve the problems of determining geographical coordinates of its units and providing these data for users with a possibility to broadcast data including a space segment when a direct link is absent. The use of AIS in vessel traffic management systems operation showed significant advantages that are associated with the defini-tion of a place and motion parameters of maritime objects and ensuring their safe movement without collision. An AIS can be used as a prototype of a ship automated control system.
Аннотация:Рассматриваются подходы к обеспечению позиционирования кораблей в строях с использованием автоматических идентификационных систем с оценкой возможности повышения точности удержания назначенной позиции при реализации метода централизованных измерений и к разработке структуры корабельной АСУ, обеспечивающей автоматизированное управление кораблем при совместном маневрировании. Подходы базируются на том, что в настоящее время имеется и в значительной степени реализована возможность непрерывного и высокоточного определения места корабля по данным спутниковых радионавигационных или радионавигационных систем, позволяющая эффективное навигационное обеспечение деятельности сил через автоматизированную обработку и предоставление пользователю навигационной информации. В процессе управления силами и средствами ВМФ в условиях быстро меняющейся обстановки и резкого увеличения потоков информации важны выработка и обеспечение высокоскоростного обмена данными. Практика применения ВМФ показала необходимость создания системы дистанционного управления тактическими объектами, которая будет решать задачи определения географических координат своих подразделений и обеспечения этими данными потребителей с возможностью реализации режимов ретрансляции данных, включая космический сегмент, при отсутствии прямой связи. Использование автоматических идентификационных систем в работе систем управления движением судов показало существенные преимущества, связанные с определением места и параметров движения морских подвижных объектов и обеспечением их безопасного от столкновений движения. Автоматическая идентификационная система может быть использована в качестве прототипа корабельной АСУ.
| Authors: Garmatenko I.S. (garmatenkoigor@gmail.com) - Military Institute (naval) the Naval Military Academic Center «The Naval Academy» (Senior Lecturer), St. Petersburg, Russia, Kushnarev A.G. (komandor.99@mail.ru) - St. Petersburg Branch of the R&D Institute Centerprogramsystem (Professor, Chief Researcher), St. Petersburg, Russia, Ph.D | |
| Keywords: ais, joint maneuvering, relative position, coordinate error, correlation |
|
| Page views: 7035 |
Print version Full issue in PDF (8.31Mb) Download the cover in PDF (1.24Мб) |
Практика совместного маневрирования кораблей в море показала, что недостатки, существующие в системе обеспечения навигационной безопасности плавания и безопасного от столкновений совместного маневрирования кораблей в строях (ордерах), компенсируются решением задач на дистанции, в значительной степени превышающей безопасную [1]. Однако специфика задач, стоящих перед кораблями ВМФ, зачастую вынуждает пренебрегать выполнением требований безопасности в пользу решения главной задачи. Данный недостаток можно легко устранить путем разработки и внедрения в ВМФ корабельной АСУ, обладающей положительными свойствами автоматической идентификационной системы (АИС) в обеспечение обмена данными между совместно маневрирующими кораблями с дискретностью 1, 4 или 12 секунд [2]. Данные интервалы времени определены дискретностью поступления информации о параметрах движения совместно маневрирующих объектов в соответствии с требованиями резолюции IMO А.917(22) к эксплуатационным характеристикам аппаратуры АИС. Использование в АИС информации о координатах и параметрах движения оцениваемых объектов, выработанных по данным ГЛОНАСС или GPS NAVSTAR, позволило в значительной степени повысить точность расчета параметров сближения в сравнении с используемыми для этих целей РЛС [3–5], благодаря чему управление силами можно осуществлять в режиме реального времени. В формализованном виде научная задача заключается в повышении вероятности удержания назначенной позиции при совместном маневрировании кораблей:
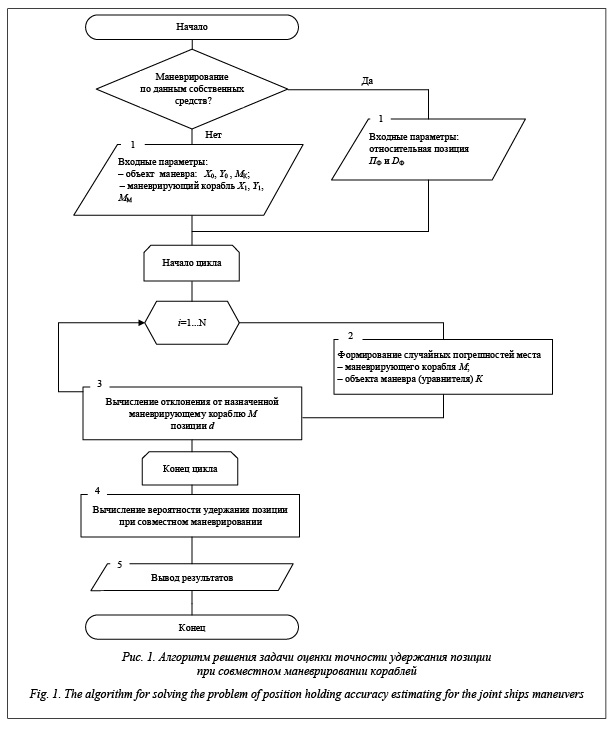
где P(r, h) – вероятности попадания в область радиусом R с центром рассеивания, находящимся на расстоянии d от центра круга [6, 7]. В настоящее время спутниковая навигация уверенно заняла главенствующую позицию в системе навигационного обеспечения благодаря высокой точности выработки искомых данных, глобальной зоне действия. Данный факт оказывает непосредственное влияние на порядок решения навигационных задач и обеспечение навигационной безопасности плавания и безопасности совместного маневрирования кораблей в море. Вместе с тем АИС имеет существенный недостаток – отсутствие данных о времени измерений и характере погрешностей места, что довольно несложно исправить путем корректуры заложенного алгоритма. Кроме этого, для обеспечения совместного маневрирования АИС должна позволять - производить освещение и оценку надводной обстановки; - учитывать время выработки навигационных данных и осуществлять их приведение к единому моменту времени; - обеспечивать применение метода централизованных измерений, заключающегося в назначении времени и порядка измерений; - производить оценку навигационной безопасности плавания и маневрирования, а также точности позиционирования кораблей в строю. Оценка возможностей предлагаемой системы в обеспечение навигационной безопасности плава- ния и маневрирования кораблей может быть произ- ведена с применением имитационной модели, построенной в программной среде Mathcad (рис. 1). Применение оператора rnorm позволило получить массив из N корреляционно независимых случайных погрешностей координат, распределенных по нормальному закону распределения, с математическим ожиданием mu и среднеквадратическое отклонение (СКО) sigma (rnorm (N, mu, sigma)) [8].
Моделирование корреляционно зависимых случайных погрешностей координат основывается на теореме предсказания [9], в соответствии с которой можно предсказать значение случайной величины x(t+t) в момент времени (t+t), если известны ее текущее значение x(t), автокорреляционная функция ρx(t) и вспомогательная случайная величина у(t), некоррелированная с x(t), с нулевым математическим ожиданием и с СКО s, равным СКО случайной величины х(t) sх, то есть
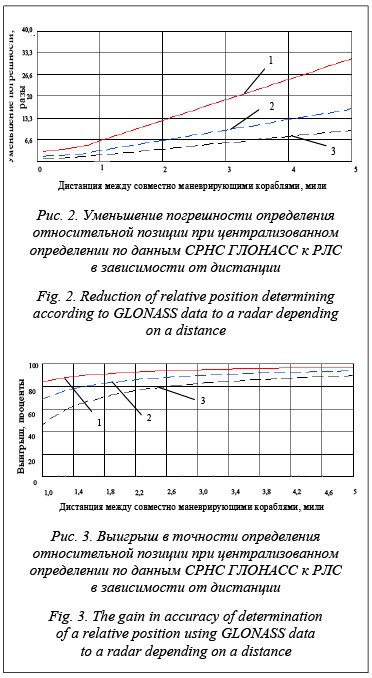
Это позволило при моделировании учесть точностные характеристики средств навигации и оценить их влияние на точность позиционирования кораблей. Оценка полученных результатов показала, что использование для позиционирования ГЛОНАСС, особенно при реализации метода централизованных измерений, приводит к повышению точности определения относительной позиции в сравнении с использованием для этих целей РЛС (рис. 2, 3). (На рисунках 2–5 разность времени снятия данных 1, 4 и 12 секунд соответственно обозначена цифрами 1, 2, 3.)
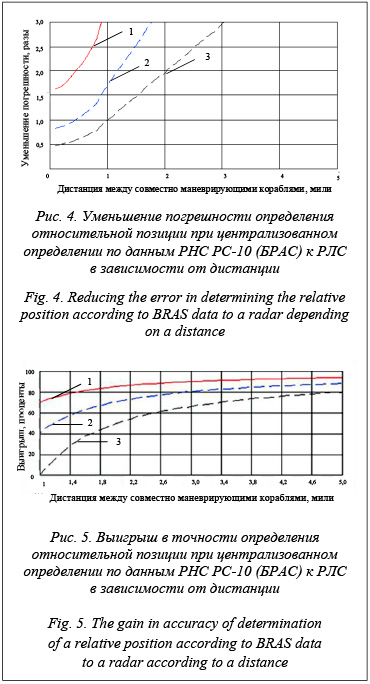
При определении относительной позиции по данным радионавигационной системы БРАС повышение точности определения относительной позиции заметно при дистанции между совместно маневрирующими кораблями более 2 миль, а при реализации метода централизованных измерений в обеспечение позиционирования кораблей в строю в сравнении с использованием для этих целей РЛС приводит к повышению точности определения относительной позиции в 5 раз, при этом выигрыш составляет 79,5 % (рис. 4, 5).
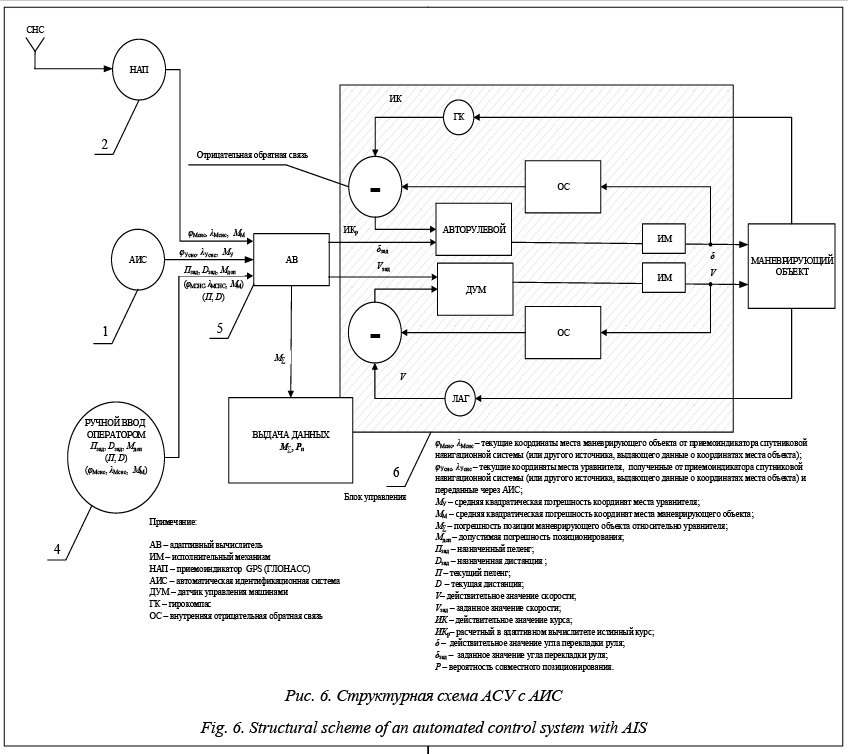
Структурная схема прототипа предлагаемой корабельной АСУ на базе АИС представлена на рисунке 6. При получении информации от АИС (1) о координатах места уравнителя и координатах места маневрирующего объекта от навигационной аппаратуры потребителя (2) в адаптивном вычислителе (5) производятся расчет допустимой погрешности позиционирования Мдоп маневрирующего объекта, выработка назначенных координат его места и сравнение их с текущими координатами места для оценки выполнения условий системы (4). При невыполнении условий производится выработка сигналов, соответствующих заданному углу перекладки руля и изменению скорости хода, которые поступают на вход блока управления (6), где складываются с сигналами обратной связи авторулевого и датчика управления машинами, определяя таким образом маневр. Контроль текущих значений курса и скорости производится с использованием курсоуказателя (гирокомпаса) и измерителя скорости (лага). Контроль угла перекладки руля и изменения скорости хода производится посредством отрицательной обратной связи от авторулевого и датчика управления машинами. При отсутствии сигнала о позиции уравнителя от АИС (1) оператор может вручную вводить ее параметры, используя либо координаты места, либо пеленг и дистанцию до уравнителя. Подводя итог, хотелось бы отметить, что, к сожалению, подобные системы уже давно приняты на вооружение в ВС США и за время эксплуатации, а это около двух десятков лет, отлично зарекомендовали себя. Но нам следует не пытаться кого-то догнать, а, используя имеющийся в этом направле- нии потенциал, работать на будущее, учитывая как положительные, так и отрицательные стороны существующих систем. Литература 1. Практическое кораблевождение для командиров кораблей, штурманов и вахтенных офицеров: Кн. 2; [сост.: А.И. Павлов, В.П. Илларионов, И.Т. Рыбин]. Л., 1988. 271 c. 2. Маринич А.Н., Проценко И.Г., Резников В.Ю., Усти- нов Ю.М., Черняев Р.Н., Шигабутдинов А.Р. Судовая автоматическая идентификационная система. СПб: Судостроение, 2004. 180 с. 3. Лентарев А.А. Морские районы систем обеспечения безопасности мореплавания. Владивосток: Изд-во ИПК МГУ им. адм. Г.И. Невельского, 2004. 119 с. 4. Вагущенко Л.Л., Вагущенко Л.А. Поддержка решений по расхождению с судами. Одесса: Феникс, 2010. 229 с. 5. Михайлов С.А., Орлов Е.О. Методика расчета параметров сближения судов с использованием информации АИС: сб. науч. трудов. Вып. 16: Судовождение. Одесса: Изд-во ОНМА им. Попова, 2009. С. 113–123. 6. Аббезгауз Г.Г. Справочник по вероятностным расчетам. М.: Воениздат, 1982. 251 с. 7. Абчук В.А. Справочник по исследованию операций. М.: Воениздат, 1979. 368 с. 8. Дьяконов В.П. MathCAD в математике: справочник. М.: Телеком, 2007. 960 с. 9. Луконин В.П. Теория обработки навигационной информации: учеб. пособие. СПб: Изд-во ВУНЦ ВМФ «ВМА», 2010. 295 с. |


| Permanent link: http://swsys.ru/index.php?id=4108&lang=en&page=article |
Print version Full issue in PDF (8.31Mb) Download the cover in PDF (1.24Мб) |
| The article was published in issue no. № 1, 2016 [ pp. 46-50 ] |
Back to the list of articles