Journal influence
Bookmark
Next issue
Method of detecting and tracking aerial objects by reflected radio signals from third-party sources in a passive-active radar system
Abstract:The article assesses the level of development of modern passive-active radar systems within the performed research. It shows that the use of such systems increases the airspace control efficiency and reduces its costs. The paper describes the developed method of detecting and tracking aerial objects by reflected radio signals from third-party sources in passiveactive radar systems. The method is based on measuring the time delay between reference and reflected signals and the relative radial velocity of the controlled object. In contrast to known approaches, this method considers the factors that affect the quality of detection and determination of air targets’ trajectory characteristics and allows expanding the zone of air space control. The research proved that the main factors that reduce the efficiency of the system are: the level of suppression of the reference signal in the target channel and the reflected signal in the main channel; changing the shape of the reflected signal; the power level of reflected signals from local stationary objects. The authors suggest the ways to reduce the impact of these factors based on algorithms for amplitude-phase correction signals in the receiving channels and decimation of digital streams. The application of these approaches reduces the procedure execution time and improves the signal/noise ratio of radar response from the aircraft object. The proposed method can be used in development of passive-active complexes of radiolocation signals of third-party sources for detection and tracking targets with coordinate and en-route information. To compare the developed method with other known methods the authors made the experiments with reception of signals reflected from real airial objects. The paper presents the results of these experimental and theoretical studies that prove the effectiveness of the developed method.
Аннотация:В рамках проведенных исследований дается оценка уровня развития современных пассивно-активных систем радиолокации. Показано, что применение таких систем повышает эффективность контроля воздушного пространства и снижает его стоимость. В работе дано описание разработанного метода обнаружения и сопровождения воздушных объектов по отраженным радиосигналам сторонних источников в пассивно-активных системах радиолокации, основанного на измерении временной задержки между опорным и отраженным сигналами и относительной радиальной скорости контролируемого объекта. В отличие от известных подходов данный метод учитывает факторы, влияющие на качество обнаружения и определения траекторных характеристик воздушных целей, и позволяет расширить зону контроля воздушного пространства. В ходе проведенных исследований доказано, что основными факторами, снижающими эффективность работы системы, являются уровень подавления опорного сигнала в целевом канале и отраженного сигнала в основном канале, изменение формы отраженного сигнала, уровень мощности отраженных сигналов от местных неподвижных объектов. Предложены пути уменьшения влияния данных факторов, основанные на применении алгоритмов амплитудно-фазовой коррекции сигналов в приемных каналах и децимации цифровых потоков. Применение данных подходов сокращает время выполнения процедур и повышает соотношение сигнал/шум радиолокационного отклика от воздушного объекта. Для сравнения разработанного метода с известными методами проведены эксперименты по приему отраженных от реальных воздушных объектов сигналов. Представлены результаты данных экспериментально-теоретических исследований, подтверждающие эффективность разработанного метода. Предлагаемый к реализации метод может быть использован при разработке пассивноактивных комплексов радиолокации по сигналам сторонних источников для обнаружения и сопровождения целей с выдачей координатно-трассовой информации.
| Authors: Batchev S.A. (timakov_da@rambler.ru) - Cherepovets Higher Military Engineering School of Radioelectronics (Deputy Head of Chair), Cherepovets, Russia, Ph.D, Zaycev A.G. (timakov_da@rambler.ru) - Radiotechnical and Information Systems Aerospace Defence (Leading Researcher), Tver, Russia, Ph.D, Talalaev A.B. () - Radiotechnical and Information Systems Aerospace Defence, Tver, Timakov D.A. (timakov_da@rambler.ru) - Radiotechnical and Information Systems Aerospace Defence (Deputy Head of Department), Tver, Russia, Ph.D | |
| Keywords: passive-active radar, parameters of a movement trajectory, doppler frequency, aerial objects detection |
|
| Page views: 8757 |
Print version Full issue in PDF (6.81Mb) Download the cover in PDF (0.36Мб) |
В последние годы большое развитие получили пассивно-активные средства радиолокации воздушных надводных и наземных целей. Неоспоримые преимущества, которыми обладают данные системы по сравнению с активными средствами, предопределили появление в ряде иностранных государств мобильных и стационарных прием- ных модулей и постов приема и обработки, отраженных от подвижных объектов сигналов сторонних источников подсвета, таких как вышки аналогового и цифрового телевидения и радиовещания, а также базовые станции сотовых систем связи и передачи данных различных стандартов [1, 2]. Работы по данному направлению в настоящее время ведутся и в отечественных организациях промышленности. Основной проблемой при решении задачи приема отраженного от объекта сигнала является влияние мощного основного сигнала от передающих устройств, работающих в непрерывном режиме, а также от неподвижных источников помех. Кроме этого, высокие требования к вычисли- тельным ресурсам при реализации существующих методов не позволяют полностью использовать потенциал пассивных систем [3]. В связи с этим возникает актуальная научно-техническая задача разработки метода обнаружения и сопровождения воздушных объектов по отраженным радиосигналам сторонних источников. Метод востребован в условиях влияния мощного основного сигнала подсвета и при ограничениях на вычислительные ресурсы системы. Общий принцип пассивной радиолокации основан на двухканальной когерентной обработке опорного сигнала, излучаемого передающей станцией, и целевого сигнала, отраженного от объекта [4–6]. В основе обработки, как и для большинства аналогичных зарубежных и отечественных пассивных систем, лежит классический подход свертки сигнала с выхода двух каналов (опорного и целевого) с возможностью измерения доплеровской частоты. Используется свойство комплексно-сопряженного умножения сигналов, представленных в цифровом квадратурном виде. Основная формула обработки для дискретных цифровых сигналов записывается в виде
где So – отсчеты сигналов опорного канала; Sц – отсчеты сигналов целевого канала; N – количество накопленных дискретных отсчетов; m – номер канала доплеровской частоты; n – сдвиг данных целевого канала относительно опорного [7]. Решение о наличии отраженного сигнала в выборке N принимается на основе пороговой обработки двумерной функции Z(m, n), вычисляемой для mÎ[0; mmax]; nÎ(0; nmax], (2) где mmax – максимальное значение частотного канала, определяемое максимально возможной частотой Доплера fD; nmax – максимальное значение сдвига, определяемое максимально возможной временной задержкой сигнала τз. Выражение (1) можно разделить на две последовательно выполняемые операции: комплексно-сопряженное умножение и расчет дискретного преобразования Фурье для заданных частотных каналов. Результатом операции комплексно-сопряженного умножения для идентичных сигналов, в том числе и широкополосных, но сдвинутых по частоте на fD, является комплексный синусоидальный сигнал, частота которого равна fD, а амплитуда – произведению амплитуд сигналов So и Sц. Для доказательства воспользуемся следующим представлением комплексного сигнала во времени [8]: z(n)=x(n)+jy(n). (3) При этом сигнал x(n) определяет действительную часть комплексного сигнала z(n), то есть Re [z(n)] = x(n), сигнал y(n) – его мнимую часть: Im [z(n)]=y(n), а j – мнимая единица, равная (–1)1/2. В соответствии с [9] сигнал z(n) может быть сдвинут в спектральной области на величину fD и преобразован в сигнал zс(n): zс(n)=xс(n)+jyс(n), (4)
где W = fD /Fдискр, Fдискр – частота дискретизации сигнала. Тогда в результате операции комплексно-сопряженного умножения сигналов (3) и (4) получим новый сигнал zrez(n):
При подстановке (5) и (6) в (7) получаем:
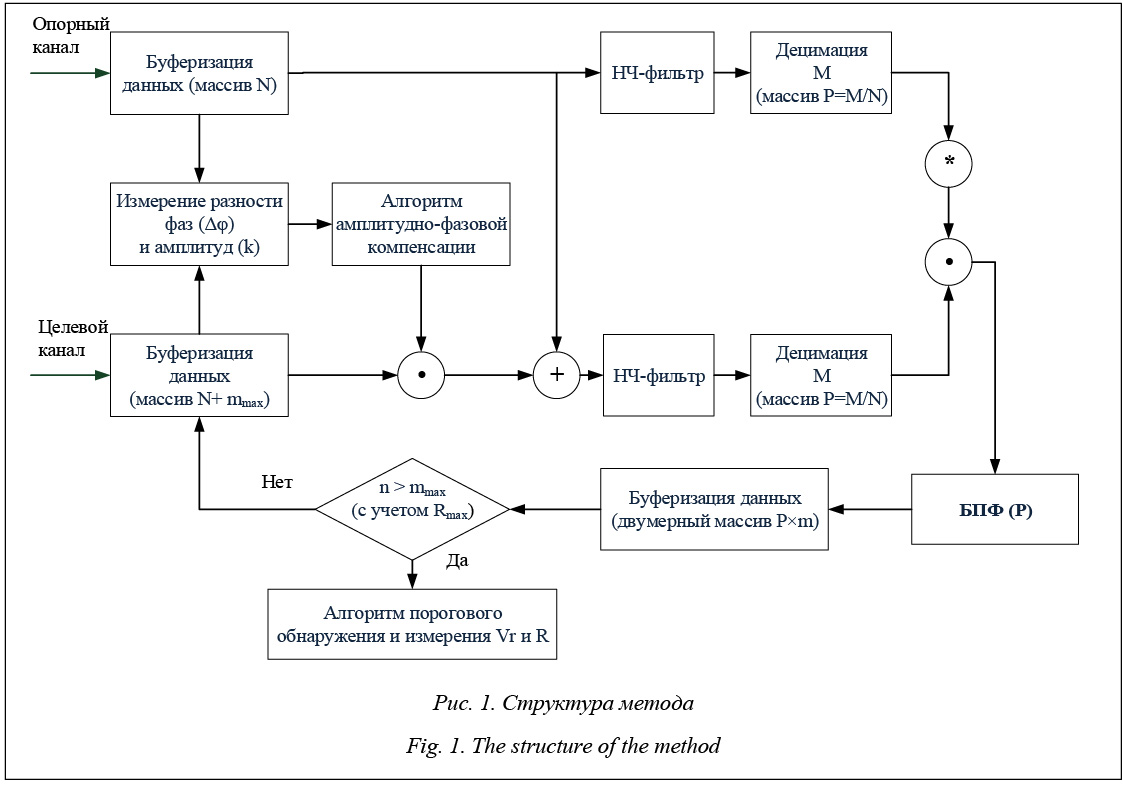
Выражение (8) представляет собой комплекс- но-сопряженное представление гармонического колебания амплитудой x2(n)+y2(n) и частотой W. Основным преимуществом операции комплексно-сопряженного умножения является сохранение гармонического закона, определяемого fD, результирующего сигнала при фазовом и амплитудном рассогласовании идентичных сигналов, которое влияет только на амплитуду и начальную фазу сигнала, что инвариантно для процедуры дискретного преобразования Фурье. Одним из основных преимуществ пассивно-активных систем с учетом того, что сигналы подсвета чаще всего работают в непрерывном режиме, является возможность длительного накопления сигнала [10]. При этом время накопления зависит только от размеров элемента разрешения в пространстве, определяемых диаграммами направленности антенн и шириной спектра сигнала. Так как диаграммы направленности передающих антенных систем имеют круговую форму по азимуту, а приемные системы, как правило, секторные, дли- тельность накопления определяется только разрешением по дальности или шириной спектра принимаемого сигнала. При этом может обрабатываться как часть спектра, так и весь спектр сигнала подсвета. Проведенные исследования показали эффективность многоканальной узкополосной (1–3 МГц) обработки для обнаружения целей и широкополосной одноканальной обработки для селекции и распознавания целей. Выбор оптимальных режимов обработки сигналов в пассивно-активных системах осуществляется на этапе проектирования системы в целом. С учетом этого размер буфера данных накопления в зависимости от времени накопления может лежать в пределах от одного до нескольких десятков миллионов отсчетов. Обработка такого объема данных в квазиреальном масштабе времени не представляется возможной. Применение алгоритма быстого преобразования Фурье вместо дискретного преобразования Фурье избыточно, поскольку возможные значения частоты Доплера лежат в начале спектра и занимают не более 5 % от всего диапазона частот. Другим немаловажным фактором, определяющим качество пассивной локации, является присутствие опорного сигнала в целевом канале и отраженного сигнала в опорном канале, а также сигналов, переотраженных от различных объектов, что приводит к искажениям принимаемых сигналов. Существующие методы, основанные на (1), не в полной мере решают указанные проблемы, поэтому не обеспечивают требуемую эффективность пассивной радиолокации. С учетом этого необходимо разработать метод обнаружения и сопровождения воздушных объектов по отраженным радиосигналам сторонних ис- точников, минимизирующий влияние сигнала под- света и переотраженных сигналов от неподвижных источников и обеспечивающий требуемое соотношение сигнал/шум на входе решающего устройства при ограничении на вычислительные ресурсы системы. Структура метода решения задачи Для решения поставленной задачи необходимо реализовать алгоритм компенсации опорного сигнала в целевом канале и снизить количество вычислительных операций. В ряде работ [11] для решения задачи минимизации влияния сигнала подсвета предлагается восстанавливать опорный сигнал и, используя его как опорный, обрабатывать данные целевого канала методом адаптивной фильтрации. Указанный подход при всей его эффективности имеет ограни- ченное использование, поскольку реализуем только для цифровых передач, а коэффициенты адаптивных фильтров не являются универсальными для всех сигналов подсвета. Кроме этого, такой подход требует большого объема вычислений. С учетом этого в работе для минимизации влияния сигнала подсвета предложено использовать алгоритм амплитудно-фазовой компенсации, а для сокращения требований к вычислительным ресурсам – алгоритм децимации сигналов.
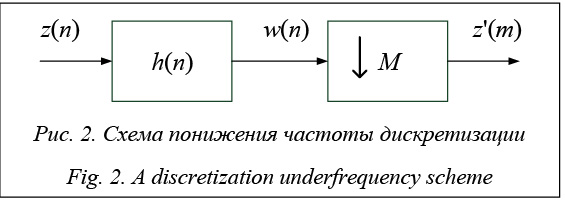
В соответствии с данной структурой оцифрованные сигналы в квадратурном виде сохраняются в виде блоков данных размерами N для опорного канала и N+mmax для целевого канала. Значение mmax определяется с учетом возможной максимальной задержки отраженного от цели сигнала для выбранной частоты дискретизации. Далее последовательно со сдвигом в один отсчет на основе представленной выше свертки формируется двумерный массив данных, в котором по одной оси представлено распределение временной задержки принятого сигнала, а по второй – частоты Доплера. На основе пороговой обработки двумерного массива с учетом заданной вероятности ложной тревоги принимается решение о наличии отраженного сигнала и вычисляются время задержки τз и частота Доплера fD. Для сокращения количества элементарных вычислительных операций предложено после комплексно-сопряженного умножения с применением операции децимации прореживать отсчеты сигнала с учетом возможного значения частоты Доплера. Рассмотрим процесс понижения частоты дискретизации сигнала z(n) в целое число раз, равное М. В этом случае новая частота дискретизации
Предположим, что сигнал z(n) характеризуется полной полосой частот; иными словами, его спектр отличен от нуля на всех частотах в диапазоне –fD/2≤ f ≤ fD/2, то есть
Согласно теореме отсчетов [9], для понижения частоты дискретизации и устранения эффекта наложения на более низкой частоте (НЧ) дискретизации необходимо пропустить сигнал z(n) через цифровой фильтр нижних частот, который в идеале должен иметь следующую частотную характеристику:
Если отклик фильтра нижних частот на единичный отсчет обозначить через h(n), то
где w(n) – выход фильтра. Выходной сигнал z'(m) будет иметь вид z'(m)= w(Mn). (13) Выходной сигнал z'(m) получается после выполнения операции во втором блоке (рис. 2). Этот блок называется компрессором частоты дискретизации и соответствует операции повторной выборки, описываемой выражением (13).
Как будет показано далее, выполнение процедуры децимации приведет к многократному сокращению времени выполнения процедуры, а применение НЧ-фильтра улучшит соотношение сигнал/шум. В разработанном методе для решения задачи минимизации влияния опорного сигнала и искажений от переотражений предложено использовать алгоритм амплитудно-фазовой коррекции как наиболее универсальный и менее требовательный к вычислительным ресурсам. Коррекции подвергается сигнал целевого канала на основе измерения разности амплитуд и фаз между целевым и опорным каналами с последующей аддитивной обработкой. Особенно эффективно его применение для приемных антенных систем с идентичными характеристиками. На первом этапе по выборкам сигналов опорного и целевого каналов производится расчет коэффициента амплитудного рассогласования:
Далее оценивается разность фаз сигналов опорного и целевого каналов:
Алгоритм амплитудно-фазовой коррекции представляет собой процедуру преобразования целевого канала, в соответствии с которой осуществляются домножение значений отсчетов на коэффициент амплитудного рассогласования KA и сдвиг фазы сигнала целевого канала на величину ∆φ+π с последующей операцией поразрядного сложения с сигналом опорного канала. Выходным сигналом алгоритма амплитудно-фазовой коррекции является сигнал S'ц, который поступает на процедуру комплексно-сопряженного умножения с принятым или восстановленным опорным сигналом. Ниже представлены выражения для расчета реальной x'(n) и мнимой y'(n) частей комплексного сигнала S'ц:
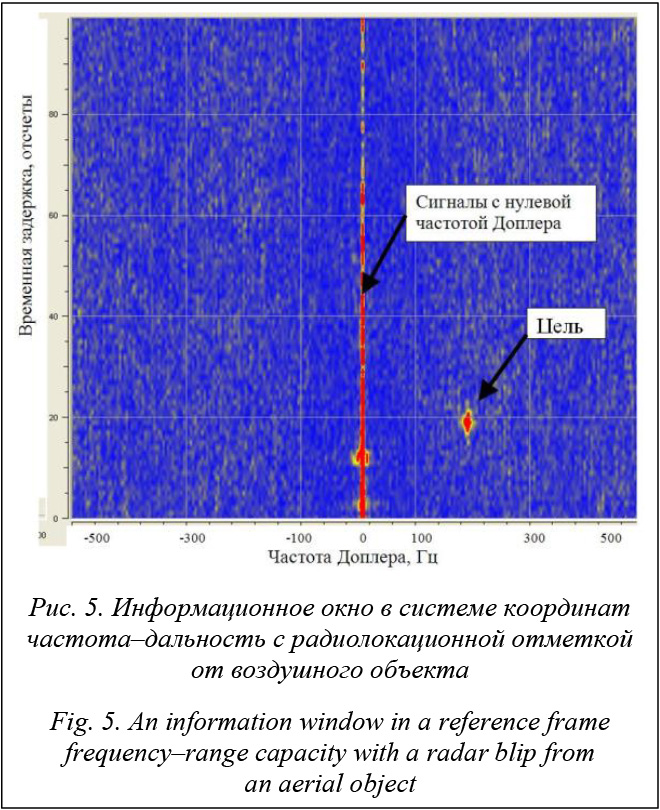
Данный алгоритм снижает влияние опорного сигнала, проникающего в целевой канал, повышает соотношение сигнал/шум и, как следствие, вероятность обнаружения цели. Результаты экспериментальных исследований Для оценки эффективности применения разработанного метода были проведены эксперимен- тальные исследования по обнаружению и определению параметров воздушных целей по отраженным сигналам цифрового телевидения стандарта DVB-T2. Двухканальная приемная система была реализована на базе радиоприемного устройства из состава подвижного автоматизированного комплекса исследования и анализа радиоизлучений и модуля цифровой обработки производства ЗАО «Инструментальные системы» (г. Москва). В качестве антенн использованы специализированные гражданские антенны дециметрового диапазона частот. Макет позволяет принимать и обрабатывать сигналы в двухканальном когерентном режиме в диапазоне частот 500–2500 МГц в полосе до 4 МГц в реальном масштабе времени и до 32 МГц в квазиреальном.
Эксперимент проводился в условиях городской застройки на 10-м этаже здания, в непосредственной близости от воздушного коридора захода на посадку военно-транспортной авиации. Расстояние до телевизионной вышки подсвета составляло около 4 км. В качестве сигнала подсвета использовался канал цифрового телевидения стандарта DVB-T2, представляющий собой набор перекрывающихся по частоте узкополосных каналов с квадратурно-фазовой модуляцией несущей с общей шириной спектра сигнала 7,62 МГц.
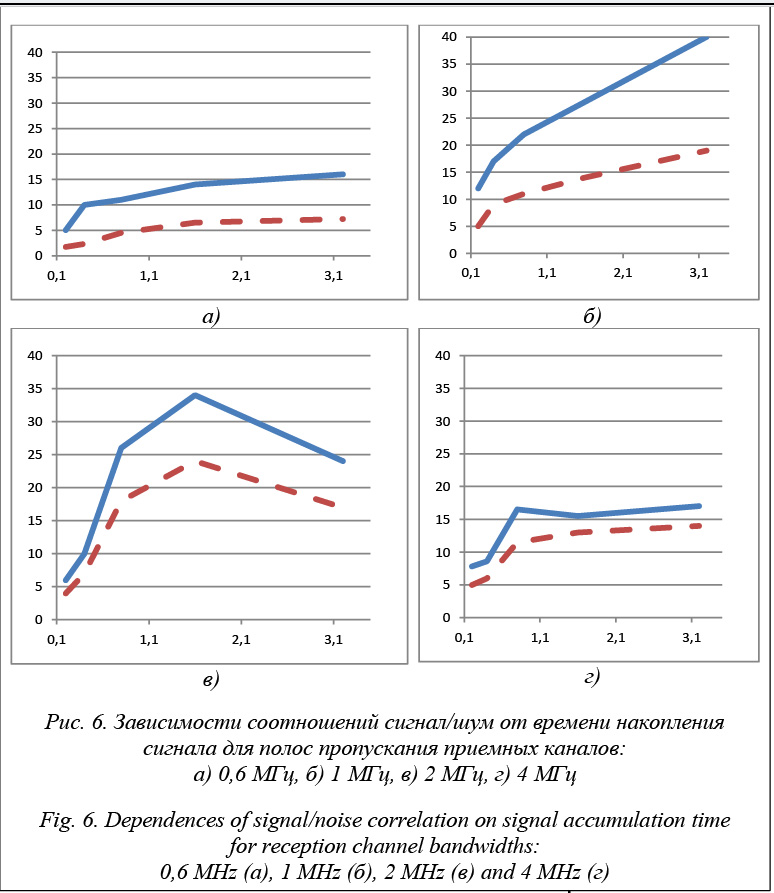
Линия в центральной части экранной области представляет собой свертку опорного сигнала, а также результат переотражения от стационарных объектов и искажения сигнала. Для сравнительной оценки эффективности применения разработанного метода были проведены эксперименты по измерению соотношения сигнал/шум и времени выполнения операций для различных полос пропускания приемных каналов (0,6; 1; 2 и 4 МГц), а также с использованием алгоритмов децимации и амплитудно-фазовой коррекции и без. Измерения производились по однотипным воздушным объектам и для близких значений относительной радиальной скорости целей V'R и времени задержки прихода сигнала по сравнению с опор- ным τз. Графики зависимости соотношений сиг- нал/шум от времени накопления сигнала для различных полос пропускания приемных каналов с использованием алгоритма амплитудно-фазовой коррекции и без представлены на рисунке 6. Из графиков видно, что соотношение сигнал/шум возрастает со временем накопления обрабатываемого сигнала, а применение алгоритма амплитудно-фазовой коррекции на 6–10 дБ повышает данное соотношение.
Для полос пропускания 1 и 2 МГц наблюдаются ярко выраженные максимумы при значениях времени накопления 3,2 и 1,6 секунды соответственно, что объясняется максимальной длительностью нахождения воздушного объекта в элементе разрешения системы с учетом условия проведения эксперимента. Наиболее эффективно применение алгоритма компенсации для полос пропускания 2 и менее МГц, что объясняется сильными искажениями сигнала в сложных городских условиях приема. Оценка времени выполнения единичной операции обработки сигналов на стандартном ПЭВМ с использованием алгоритмов децимации и амплитудно-фазовой коррекции и без них показывает, что использование алгоритма децимации в 2–3 раза сокращает время выполнения операции. При этом при проведении эксперимента использовался фильтр с конечной импульсной характеристикой. Его замена на фильтр с бесконечной импульсной характеристикой или каскадная фильтрация позволит еще в несколько раз сократить время выполнения процедуры. Кроме этого, операции вычисления тригонометрических функций в (16) и (17) могут быть оптимизированы за счет использования их периодических свойств, что также уменьшит время выполнения процедур. Таким образом, на основе проведенного экспериментально-теоретического исследования для всех полос пропускания (0,6; 1; 2 и 4 МГц) подтверждена возможность получения первичных радиолокационных отметок от воздушных целей по сигналам сторонних источников. Реализованный в программе технического анализа сигналов метод обнаружения и сопровож- дения воздушных объектов по отраженным радиосигналам сторонних источников обеспечивает обнаружение воздушных объектов, находящихся в секторе обзора антенны, и оценку (в каждый момент времени) относительной радиальной скорости цели и времени задержки прихода отраженного сигнала. Кроме того, в ходе проведенного исследования определены факторы, влияющие на эффективность пассивно-активных систем, в частности, уровень подавления опорного сигнала в целевом канале и отраженного сигнала в основном канале, а также искажения сигнала в опорном канале за счет переотражений. Метод может быть использован при разработке пассивно-активных комплексов радиолокации по сигналам сторонних источников для обнаружения и сопровождения целей с выдачей координатно-трассовой информации. Литература 1. Аношкин И.М. Зарубежные многопозиционные радиолокационные системы скрытного контроля воздушного пространства // Наука и военная безопасность. 2007. № 1. С. 28–33. 2. Алифанов Р.Н., Стародубцев П.А., Дементьев С.Г., Дементьев С.С. Системы общедоступного радиовещательного передатчика для обнаружения и сопровождения цели // Науковедение. 2014. № 6. URL: http://naukovedenie.ru/PDF/74TVN614. pdf (дата обращения: 16.05.2016). 3. Willis N.J. Bistatic radars and their third resurgence: passive coherent location. IEEE Radar Conf., Long Beach, USA, 24 April 2002. 4. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. Киев: Изд-во КВIЦ, 2000. 428 с. 5. Черняк В.С., Заславский Л.П., Осипов Л.В. Многопозиционные радиолокационные станции и системы // Зарубежная радиоэлектроника. 1987. № 1. С. 9–69. 6. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993. 416 с. 7. Christiansen J.M. DVB-T based passive bistatic radar. Master’s thesis, 2009, 76 p. 8. Голд Б.Е., Рейдер Ч.А. Цифровая обработка сигналов. М.: Сов. радио и связь, 1978. 368 с. 9. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Циф- ровая обработка сигналов: справочник. М.: Радио и связь, 1985. 312 с. 10. Kyovtorov V., Vespe M., Fortuny Guasch J., Tarchi D., Giuliani R., Broussolle J. Passive automatic identification system for maritime surveillance – JRC, 2012. URL: http://publications.jrc.ec. europa.eu/repository/bitstream/JRC68405/lbna25169enn.pdf (дата обращения: 16.05.2016). 11. Фам Х.Т. Полуактивная радиолокационная система с использованием сигналов DVB-T2: дис. ... канд. технич. наук. СПбГУ «ЛЭТИ», 2015. 150 с. |
 , (1)
, (1) , (5)
, (5) , (6)
, (6)
 (7)
(7) (8)
(8)
 . (9)
. (9) (10)
(10) (11)
(11)
 , (12)
, (12)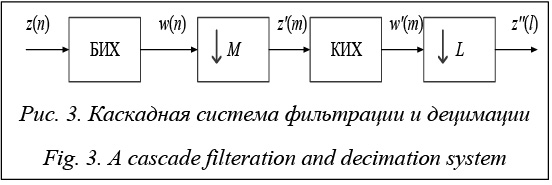
 . (14)
. (14) . (15)
. (15) (16)
(16) . (17)
. (17)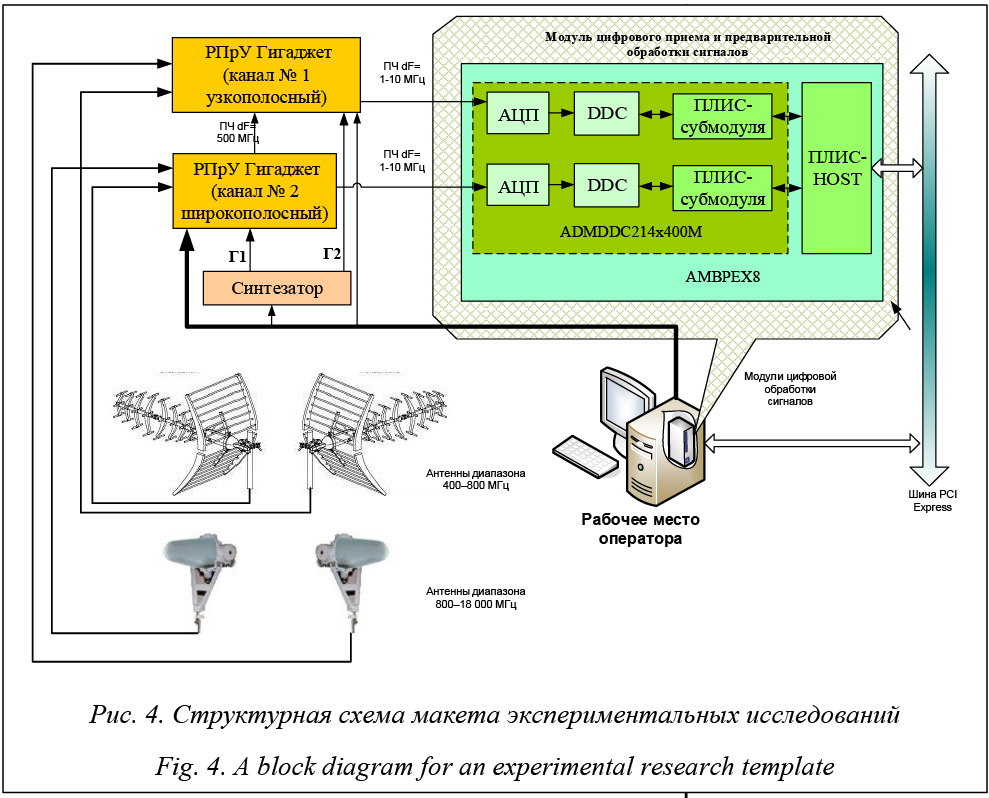
| Permanent link: http://swsys.ru/index.php?id=4194&lang=en&page=article |
Print version Full issue in PDF (6.81Mb) Download the cover in PDF (0.36Мб) |
| The article was published in issue no. № 3, 2016 [ pp. 168-174 ] |
Back to the list of articles