Journal influence
Bookmark
Next issue
Modeling traffic flows in AnyLogic
Abstract:The article proposes a technique for modeling traffic flows in a simulation environment. The goal was to simulate a section of the road network in Krasnoyarsk. The goal included the following tasks: to gather data on the traffic flow intensity at a site, to develop a simulation model of an intersection. The authors have chosen the AnyLogic modeling environment to solve the problems. The simulation experiment requires the input parameters. I this case, they are the intensity of vehicles arrival and the distribution of vehicles by a direction. The developed simulation model has the following structural elements: road network elements, model agent generation system, vehicle traffic logic blocks, model parameters control elements, and an agent statistics gathering module. The model execution mode allows displaying animation, which is a two-dimensional plan of the simulated system with moving vehicles. In addition, there is a functional for switching between a two-dimensional and three-dimensional system plan. The statistical data take into account the time a vehicle passes a road network segment, as well as the total intersection traffic capacity. The procedure of performing the experiment is a preliminary tuning of a simulation model to the average traffic capacity of the intersection (this usually occurs after a number of vehicles exiting the model using the Sink component reaches 20 or more thousands). Then while changing the time of the traffic lights, the simulation model is started alternately. After finishing a series of runs, follows the calculation of the difference in the mean delay of hard and adaptive regulation, construction of the graphs, and making the conclusions. As a result, we get a simulation model with an experimental technique that can be useful in determining the maximum traffic capacity at traffic intersections, planning road infrastructure, etc.
Аннотация:В статье предложена методика моделирования транспортных потоков в среде моделирования. Была поставлена цель смоделировать участок дорожной сети г. Красноярска, для достижения которой необходимо решить две задачи: собрать данные по интенсивности транспортного потока на участке и разработать имитационную модель перекрестка. Для их решения выбрана среда моделирования AnyLogic. При проведения эксперимента по моделированию необходимы входные параметры, в данной ситуации – интенсивность прибытия транспортных средств и распределение автомобилей по направлению. Разработанная имитационная модель состоит из элементов дорожной сети, системы генерации агентов модели, блоков логики движения транспортных средств, элементов управления параметрами модели, модуля сбора статистики параметров агентов. В режиме исполнения модели отображается анимация, представляющая собой двухмерный план моделируемой системы с движущимися по ней транспортными средствами. Также есть функционал для переключения между двухмерным и трехмерным планами системы. В статистических данных учитываются время прохождения автомобилем участка дорожной сети, а также общая пропускная способность перекрестка. Методика проведения эксперимента представляет собой предварительную настройку имитационной модели на среднюю пропускную способность перекрестка (обычно этот момент наступает после того, как количество автомобилей, вышедших из модели с помощью компонента Sink, достигнет значения 20 тыс. и более), далее, изменяя время работы светофоров, запускается поочередно имитационная модель. По окончании серии прогонов выполняется расчет разности средних задержек жесткого и адаптивного регулирования, строятся графики, делаются выводы. В результате получается имитационная модель с методикой проведения эксперимента, которая может быть полезна при определении максимальной пропускной способности транспортных пересечений, планировании дорожной инфраструктуры и т.д.
| Authors: Ya.I. Shamlichky (2538357@mail.ru) - Academician M.F. Reshetnev Siberian State University of Science and Technology (Associate Professor), Krasnoyarsk, Russia, Ph.D, A.S. Okhota (okhota.sanya@mail.ru) - Academician M.F. Reshetnev Siberian State University of Science and Technology, Krasnoyarsk, Russia, S.N. Mironenko (2538357@mail.ru) - Academician M.F. Reshetnev Siberian State University of Science and Technology, Krasnoyarsk, Russia | |
| Keywords: atcs, anylogic, modeling, simulation model, test |
|
| Page views: 12397 |
Print version Full issue in PDF (29.03Mb) |
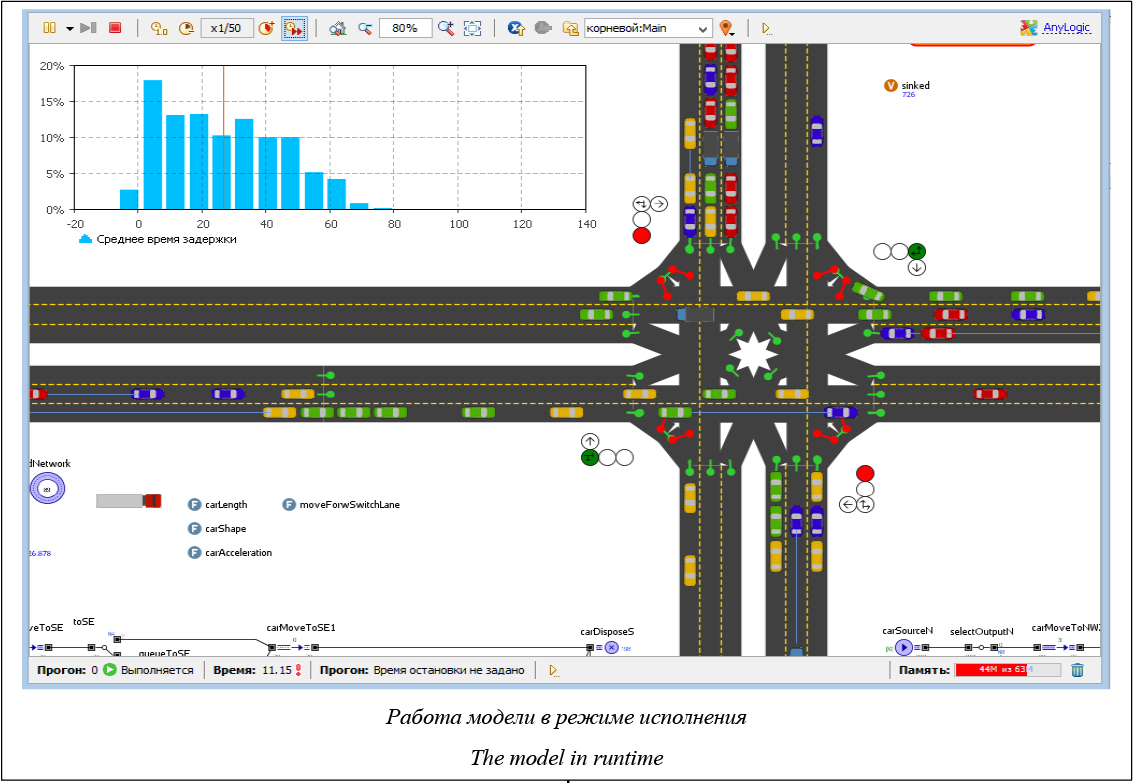
В настоящее время остро стоит проблема управления транспортными потоками, особенно в больших городах. Увеличение количества как личных, так и общественных транспортных средств (ТС) привело к перегруженности городских дорог, многочасовым пробкам, затруднению движения пешеходов, увеличению количества аварий и т.д. Объектом в системе управления дорожным движением является транспортный поток, состоящий из технических средств (автомобилей, мотоциклов, автобусов и т.д.). Компьютерное моделирование становится распространенным средством анализа сложных систем. Современный рынок внедрения и сопро- вождения технологических систем часто требует разработки систем поддержки принятия стратегических и оперативных решений на основе имитационных моделей. Так, низкоуровневое имитационное моделирование все чаще применяется при принятии решений о проектировании и реорганизации транспортных систем [1, 2]. В качестве платформы создания имитационной модели была выбрана среда моделирования AnyLogic 6.9.0 University (версия для образовательных учреждений). Разработанная имитационная модель (см. рисунок) содержит следующие структурные элементы:
- четырехстороннее пересечение с примыка- ющими с каждой стороны дорогами; - разделительная полоса, разделяющая каждую дорогу на две проезжие части по три полосы в каждом направлении; - система генерации агентов модели – ТС двух типов: легковой автомобиль и грузовой автомобиль грузоподъемностью от 2 до 6 тонн; - четыре блока логики движения ТС (по одному на каждое направление); - модели элементов световой сигнализации – светофоры типа Т.1.л; - диаграмма состояний, моделирующая логику переключения сигналов светофоров, основанную на двухкольцевой фазировке; - модуль системной динамики, моделирующий работу контроллера локального пересечения; - блок управляющих параметров модели; - элементы управления параметрами модели; - модуль чтения параметров цикла жесткого регулирования из внешнего файла MSExcel; - модуль сбора статистики параметров агентов; - гистограмма распределения задержки ТС, показывающая также среднее время задержки всех ТС на протяжении эксперимента [3–9]. Созданная на базе AnyLogic 6.9.0 имитационная модель может быть использована для поддержки принятия решений и охватывает все этапы проведения исследований с помощью имитационного моделирования. Для проведения исследований алгоритма была разработана методика проведения эксперимента. Входящие параметры модели: - интенсивность прибытия ТС северного IN, восточного IE, южного IS и западного IW подходов, авт./мин.; - распределение автомобилей по направлениям (налево, прямо, направо) для каждого подхода, %: для северного – pNлев., pNпрям., pNправ.; для восточного – pEлев., pEпрям., pEправ.; для южного – pSлев., pSпрям., pSправ.; для западного – pWлев., pWпрям., pWправ.. Порядок проведения испытаний следующий. 1. Вначале составляется программа испытаний, базирующаяся на различных комбинациях последовательных изменений входящих параметров модели. 2. Далее для каждого испытания производится расчет длительностей основных тактов по общепринятому алгоритму Вебстера для жестких алгоритмов. 2.1. Рассчитывается поток насыщения:
где P – пропускная способность полосы движения, ед./ч; n – число полос, открытых для движения; ID – интенсивность движения на рассматриваемом подходе к пересечению, прив.ед./час; pDпрям., pDлев., pDправ. – доли автомобилей, проезжающих в указанном направлении, %. 2.2. Вычисляется фазовый коэффициент: y = ID/M. (2) В каждой фазе выбирается подход или выделенное направление с максимальным фазовым коэффициентом, то есть наиболее загруженный. Он и является лимитирующим. 2.3. Выполняется расчет переходных тактов t`. В общем случае переходные интервалы не следует назначать длительностью менее 3 с. Если найденное значение t´ не превышает 4 с, то переходный интервал состоит из одного такта (желтый сигнал). При t´ = 5, …, 8 с переходный интервал должен быть составлен из двух вспомогательных тактов (желтый и одновременно красный сигналы включаются в момент выключения желтого). Для упрощения расчетов принимаем длительность переходных интервалов t´ = 3 с. 2.4. Рассчитывается длительность цикла регулирования:
где L – сумма всех вспомогательных тактов, с; yi – фазовые коэффициенты. 2.5. Вычисляется длительность основных тактов:
3. Полученные значения длительностей основных тактов сводятся в отдельный файл MSExcel (см. таблицу). Длительность основных тактов Duration of the main measures
4. Производится запуск модели, и в режиме исполнения выставляются значения входящих параметров в соответствии с номером эксперимента, а также режим работы модели «Жесткая логика» и номер логики жесткого управления. 5. После выставления параметров выставляется максимальная скорость выполнения и фиксируется момент, когда среднее время задержки примет стабильное состояние (обычно этот момент наступает после того, как количество автомобилей, вышедших из модели с помощью компонента Sink, достигнет значения 20 и более тысяч). При достижении стабильного состояния среднего времени задержки производятся снятие его значения и запись в соответствующую ячейку листа обработки экспериментальных данных. Затем выполняется выход из режима исполнения модели. 6. Осуществляется повторный запуск модели, в режиме исполнения выставляются значения входящих параметров в соответствии с номером эксперимента, выставляется режим работы модели «Адаптивная логика», выставляется максимальная длительность зеленого сигнала, равная максимальному значению длительности основных тактов для алгоритма жесткого регулирования, экипажное время выставляется равным 4 с. 7. После выставления параметров выставляется максимальная скорость выполнения и фиксируется момент, когда среднее время задержки примет стабильное состояние (обычно этот момент наступает после того, как количество автомобилей, вышедших из модели с помощью компонента Sink, достигнет значения 30 и более тысяч). При достижении стабильного состояния среднего времени задержки производятся снятие его значения и запись в соответствующую ячейку листа обработки экспериментальных данных. Затем выполняется выход из режима исполнения модели. 8. Снова повторяются этапы 6 и 7 с той лишь разницей, что при первом повторе максимальная длительность зеленого сигнала устанавливается на 2 с больше, во втором – на 2 с меньше и на третьем – на 5 с меньше. 9. Испытания повторяются для каждого номера эксперимента (этапы 4–8). Таким образом, полное исследование работы модели состоит из 150 прогонов. 10. По окончании серии прогонов выполняется расчет разности средних задержек жесткого и адаптивного регулирования, строятся графики, делаются выводы. Указанная методика моделирования может быть полезна при определении максимальной пропускной способности транспортных пересечений, планировании дорожной инфраструктуры и т.д. Литература 1. Левашев А.Г., Михайлов А.Ю. Основные параметры оценки пропускной способности регулируемых пересечений // ВИНИТИ. 2004. № 3. С. 14–19. 2. Малыханов А.А., Черненко В.Е. Среда низкоуровневого имитационного моделирования транспортных систем // Автоматизация в промышленности. 2010. № 1. С. 34–37. 3. Traffic control in oversaturated street networks. NCRHP report, 1978, no. 194, 152 p. 4. Highway Capacity Manual. TRB, Washington, DC, 2000, 1134 p. 5. Teply S. Canadian Capacity Guide for signalized intersection. Committee Canadian Capacity Guide for Signalized Intersections, 1995, 117 p. 6. Врубель Ю.А. Исследования в дорожном движении. Минск: Изд-во БНТУ, 2007. 178 с. 7. Кременец Ю.А. Технические средства организации дорожного движения. М.: Академкнига, 2005. 279 с. 8. Mn/DOT Traffic Signal Timing Coordination Manual. Minnesota Department of Transportation, 2011, 184 p. 9. Datta T.K. Innovations in Traffic Signal Systems. Advanced Traffic Signal Systems, Wayne State Univ., Detroit, Mich, 2003, pp. 23–25. References
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ,(1)
,(1) , (3)
, (3) . (4)
. (4)| Permanent link: http://swsys.ru/index.php?id=4510&lang=en&page=article |
Print version Full issue in PDF (29.03Mb) |
| The article was published in issue no. № 3, 2018 |
Perhaps, you might be interested in the following articles of similar topics:
- Имитационная модель системы стимулирования труда преподавателей вуза
- Программа моделирования электронной аппаратуры при ударных воздействиях
- Сравнение адаптивного и жесткого алгоритмов управления дорожным движением на базе имитационной модели в среде AnyLogic
- Системы поддержки принятия решений в управлении вузом: вычислительные модели дифференциации учебной нагрузки
- Программный комплекс обнаружения аномалий формы рельсовых путей
Back to the list of articles